3.Способ по п. 1, о т л и ч аю щ и и с я тем, что при нечетном числе зубьев между шаровыми установочными наконечниками ось У устанавливают посередине между фактическими координатами точек правой и левой стороны профиля среднего зуба, измеренных при одинаковом значении координаты У.
4.Способ по п. 1, о т л и ч аю щ и и с я тем, что при четном . числе зубьев между шаровыми установочными наконечниками ось У устанавливают посередине меявду фактическими координатами точек правой и левой сторон .профиля средней впадийы, измеренных при одинаковом значении координаты У,
5.Устройство для контроля профиля зуба зубчатых колес, содержащее основание с тангенциальными направляющими, двое продольных салазок
с шаровыми установочными наконечниками, подвижные по указанным направляющим, размещенный между салазками и подвижный в тангенциальном направлении ползун с поперечными направляющими, поперечные салазки, подвижные по поперечным направляющим, управляемые .приводы координатных перемещений поперечных салазок и ползуну, средства измерения перемещений поперечных салазок и ползуна, а также датчик малых перемещений, установленный на поперечных салазках, отличающее с.я тем, что тангенциальные направляющие выполнены в виде двух параллельных пазов на всю длину основания, а ползун установлен на тех же направляющих, что и продольные салазки.
6.Устройство по п. 5, отличающееся тем, что поперечные салазки снабжены двумя опозитно расположенныеми чувствительными упорами, а продольные салазки двумя соосными жесткими упорами, размещенными в плоскости чувствительных упоров поперечных салазок.
7.Устройство по пп. 5 и 6, отличающееся тем, что средства измерения перемещений ползуна
и поперечных салазок вьшолнены в виде линеек, закрепленных соответственно на основании и ползуне, и отсчетных головок, закрепленных соответственно на полззше и поперечныу салазках.
-1 . Способ контроля профиля зубьев зубчатых колес- при помощи накладных средств с прямоугольной коррдинацией системой X, У, заключающийся в том, что, накладное средство базируют по колесу с помощью двух шаровых установочных наконечни ков, помещаемых во впадины между зубьями, устанавливают координатную плоскость перпендикулярно оси контролируемого зубчатого колеса, ось У устанавливают перпендикулярно прямой, проходящей через центры шаровых установочных наконечников, а ось X проводят посередине между ними, определяют начальные точки указанных осей координат, вычисляют теоретические координаты точек профиля зуба, устанавливают в зти точки измеритель малых отк от ча пов ние ных дин где щ и сто тан пер мещ ми ми пут тел перемещений и по нему определяют онения фактических точек профиля еоретических значений, отлиющийся тем, что, с целью шения точности, измеряют расстоямежду центрами шаровых установочнаконечников и определяют коорту центра колеса по формуле YO |ct(l8o-J C VO - координата центра колеса в координатной системе станка; измеренное расстояние между центрами шаровых установочных наконечников-, полное число зубьев измеряемого колеса-, kZ - число зубьев между шаровыми установочными наконечниками j С- константа устройства,-характеризующая координату точки пересечения оси У с прямой, соединяющей центры шаровых установочных наконечников. . Способ по п. 1, о тли ч а юи с я тем, что измерение расния между центрами шаровых усвочных наконечников выполняют мещением измерителя малых перений между шаровьми установочныаконечниками до касания с упора-, тих наконечников и регистрацией , пройденного указанным измерим малых перемещений.
1
: Изобретение относится к машиностроению, а именно к методам и средствах измерения зубчатых колес.
Известен способ контроля зубчатых колес, заключающийся в том, что по диску с диаметром, равным диаметру основной окружности контролируемого, обкатывают линейку и воспроизводят этим теоретическую эвольвенту, который реализован в устройстве, содержаЙ1ем стол, салазки, систему тяг,систему кареток и измерительный датчик 1 3.
Недостатком этого способа является низкая точность контроля.
Наиболее близким к изобретению по технической сущности является спо соб контроля профиля зуба зубчатых колес при помощи накладных средств с прямоугольной координатной системой X, У, заключающийся в том, что
накладное средство базируют по колесу с помощью двух шаровых установочных наконечников, помещаемых во впадины между зубьями, устанавливак т
координатную плоскость перпендикулярно оси контролируемого зубчатого колеса, ось У устанавливают перпендикулярно прямой, проходящей через центры шаровых установочных наконечников,
а ось X проводят посередине между ними, определяют начальные точки указанных осей координат, вычисляют теоретические координаты точек профиля зуба, устанавливают в эти точки
измеритель малых перемещении и по
нему определяют отклонения фактических точек профиля от теоретических значений.
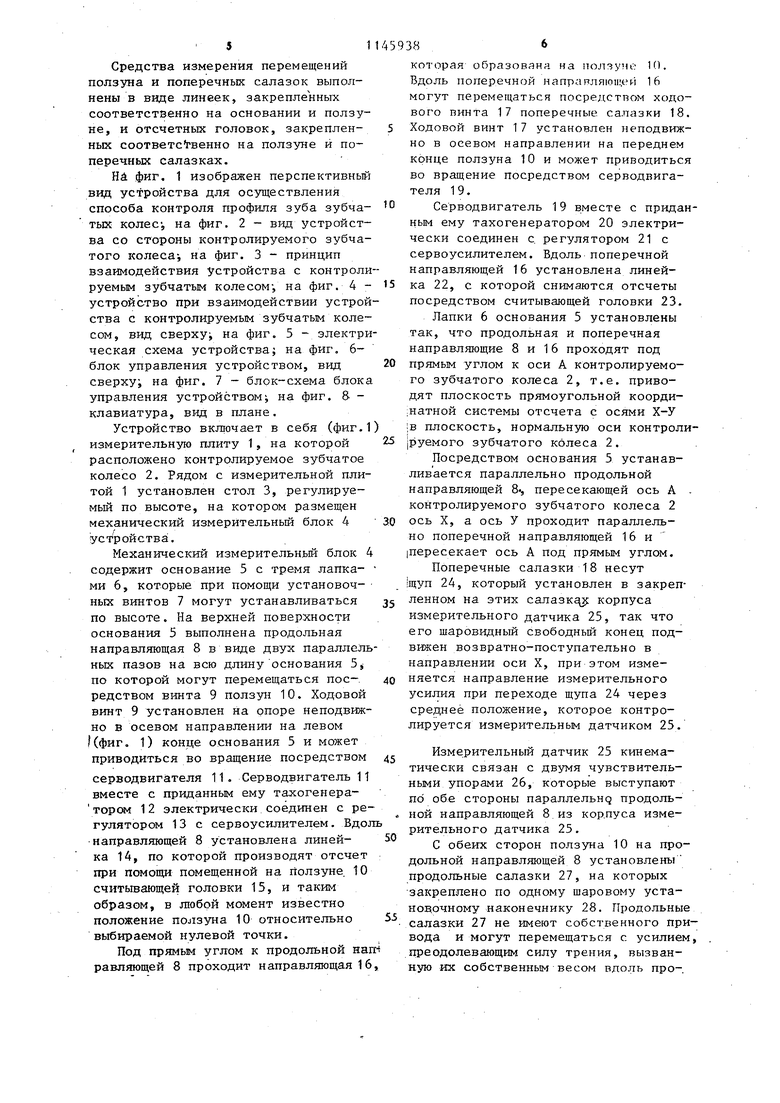
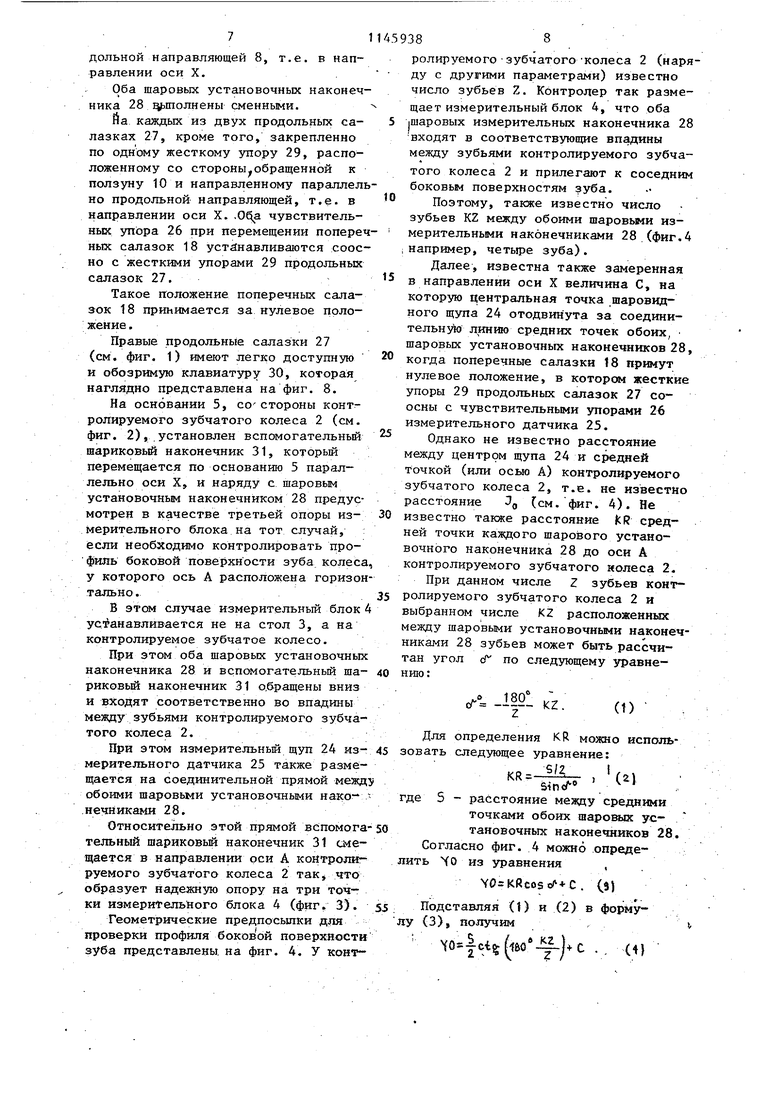
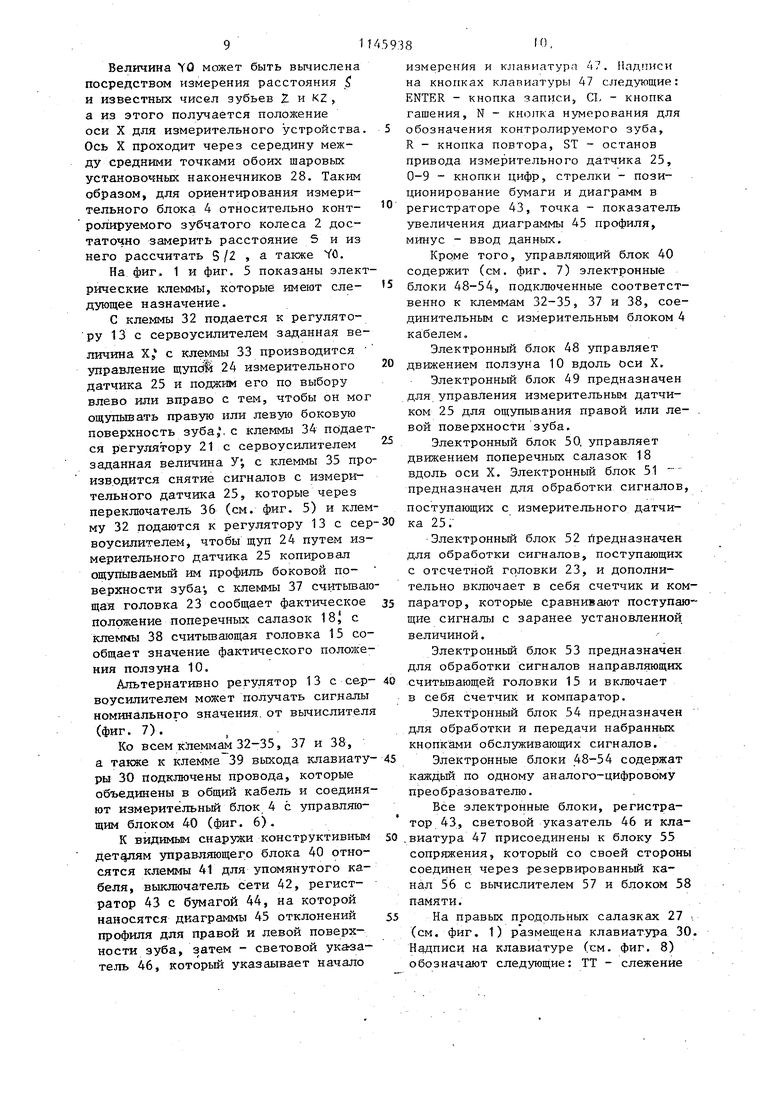
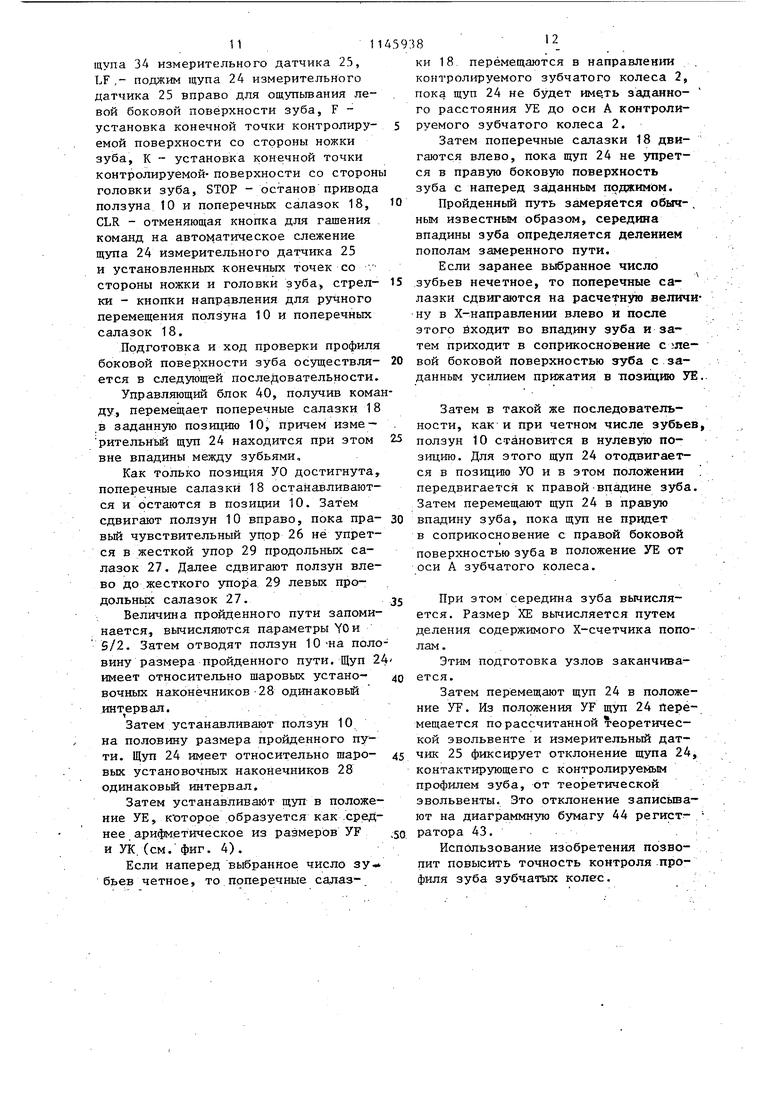
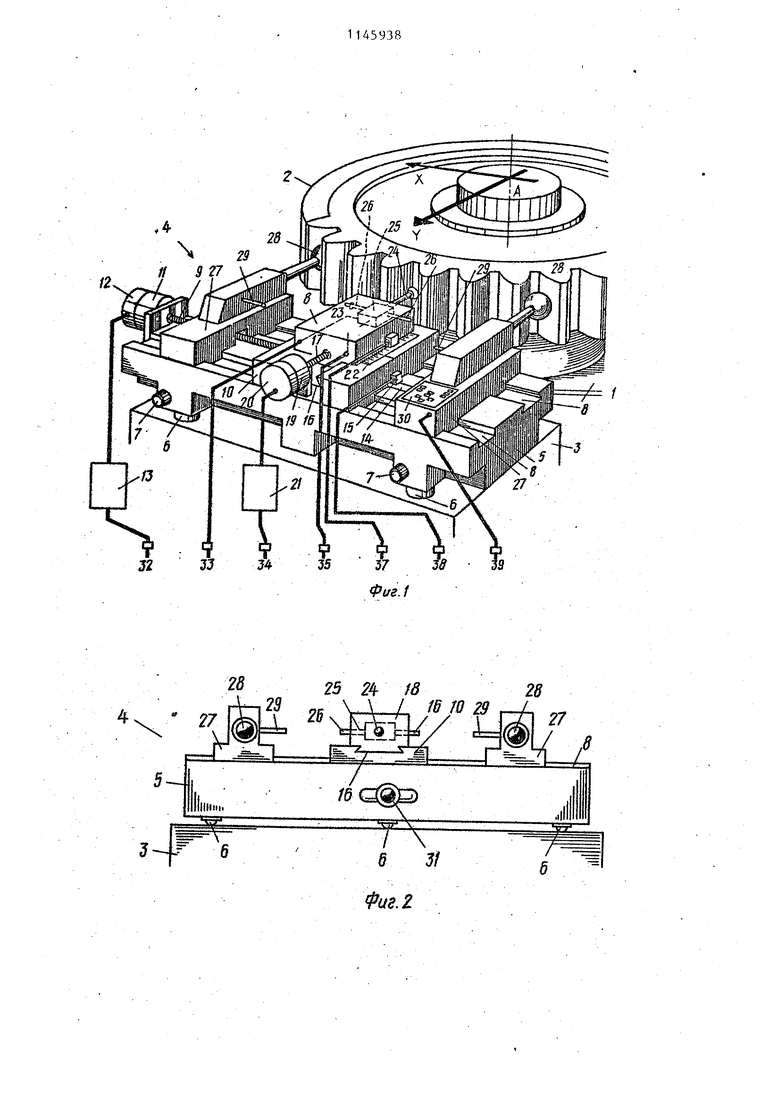
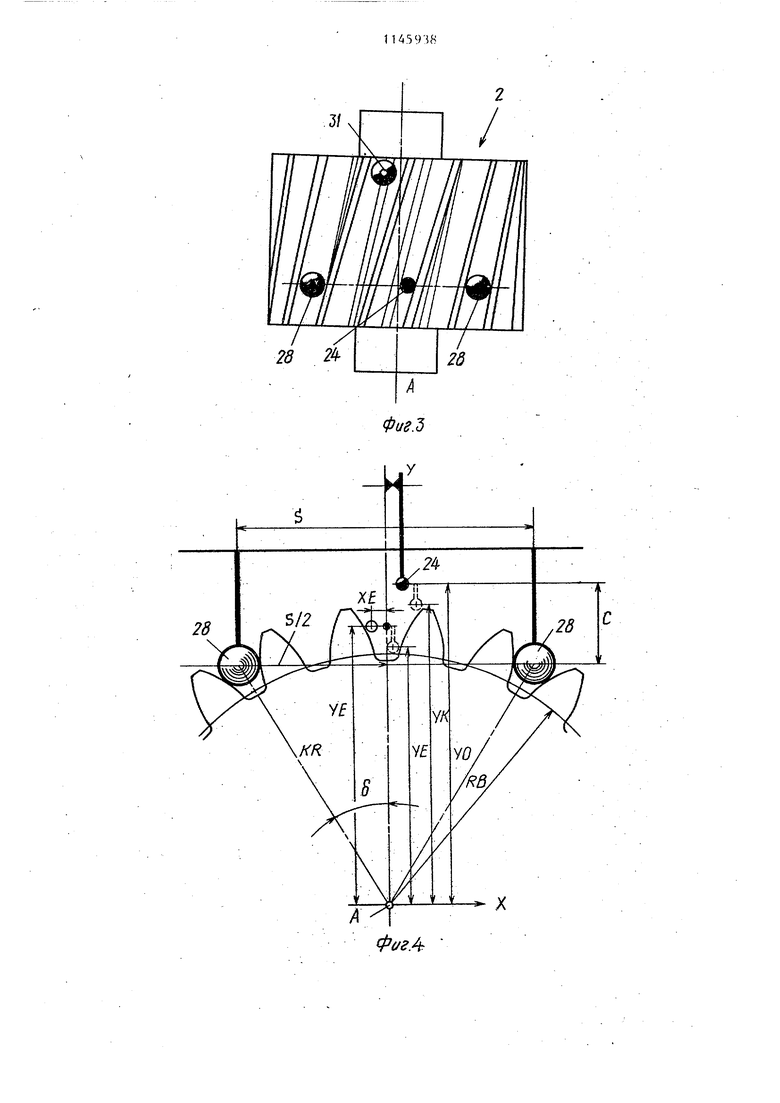
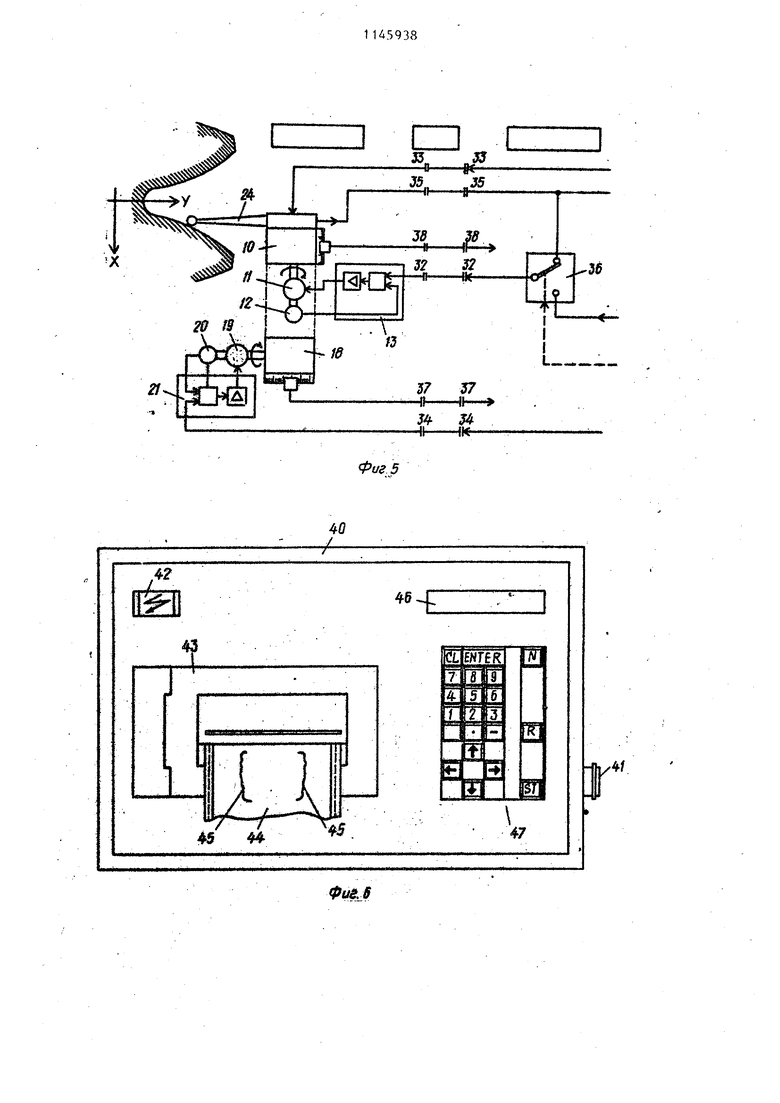
Указанн{ 1й способ реализован устР0ЙСТВОМ для контроля профиля зуба йубчатых колес, содержащим основание J1 с тангенциальными направляющими, двое продольных салазок с шаровыми установочными наконечниками, подвижных по упомянутым направляющим, размещенный между салазками и подвижный в тангенциальном направлении тюлзун с поперечными направляющими, управляемые приводы координатных перемеще ний поперечных салазок и ползуна, средства измерения перемещений поперечных салазок и ползуна, а также датчик малых перемещений, установлен ный на поперечных салазках C2J. Недостатком этого способа является низкая точность контроля зубчатых колес, в частности у которых профиль зуба не шл.фован. Цель изобретения - повышение точности контроля. Цель достигается тем, что согласно способу контроля профиля зуба зуб |чатых колес при помощи на.кладных средств спрямоугольной координатной системстй X, У, заключающемуся в том, что накладное средство базируют по колесу с помощью двух шаровых установочных наконечников, помещаемых во впадины между зубьями, устанавливают координатную плоскость перпендикулярно оси контролируемого зубчаттого колеса, ось У устанавливают пер пендикулярно прямой, проходящей чере центры шаровых установочных наконечников, а ось X проходит посередине между ними, определяют начальные точ ки указанных осей координат, вычисляют теоретические коордршаты точек профиля зуба, устанавливают в эти точки измеритель малых перемещений и по нему определяют отклонение фактических точек профиля от теоретических значений, измеряют расстояние между центрами шаровых установоч ных наконечников и определяют координату центра колеса по формуле (fgo--)-bC , где о - координата центра колеса в координатной системе стан ка; . 5 - измеренное расстояние между центрами шаровых установочных наконечников-, Z - полное число зубьев измеря емого колеса-, К2 - число зубьев между шаровыми установочными наконечниками. 84 С - константа устройства, характеризующая координату точки пересечения оси У с прямой, соединяющей центры шаровых установочных наконечников. Кроме того, измерение расстояния между центрами шаровых установочных наконечников выполняют перемещением измерителя малых перемещений шаровыми установочными наконечниками до касания с упорами этих наконечников и регистрацией пути, пройденного указанным измерителем малых перемещений. При нечетном числе зубьев между шаровыми установочными наконечниками ось У устанавливают посередине между фактическими координатами точек правой и левой стороны профиля среднего зуба, измеренных при одинаковом значении координаты У. При четном числе зубьев между шаровыми установочными наконечниками ось У устанавливают посередине между фактическими координатами точек правой и левой сторон профиля средней впадины, измеренных при одинаковом значении координаты У. В устройстве для контроля профиля зуба зубчатых колес, содержащем основание с тангенциальными направ ляющими, двое продольных салазок с шаровьми установочными наконечниками, подвижные по указанным направляющим, размещенный между салазками и подвижный в тангенциальном направлении ползун с поперечными направляющими, поперечные салазки, подвижные по поперечным направляющим, з равляемые приводы координатных перемещений поперечных салазок и ползуна, средства измерения перемещений.поперечных салазок и ползуна, а также датчик малых перемещений, установленный на поперечных салазках, тангенциальные направляющие выполнены в виде двух параллельны пазов на всю ; длину основания, а ползун установлен на тех же направляющих, что и про- . дольные салазки. Кроме того, поперечные салазки снабжены двумя опозитно расположенными, чувствительными упорами, а продольные салазки - двумя соосньми жесткими упорами, размещенньми в плоскости чувствительных упоров поперечных оалазок. Средства измерения перемещений ползуна и поперечных салазок выполнены в виде линеек, закрепленных соответственно на основании и ползуне, и отсчетных головок, закрепленных соответсгвенно на ползуне и поперечных салазках. Е& фиг, 1 изображен перспективньй вид устройства для осуществления способа контроля профиля зуба зубчатых колес-, на фиг. 2 - вид устройства со стороны контролируемого зубчатого колеса-, на фиг. 3 - принцип взаимодействия устройства с контроли руемым зубчатым колесом-, на фиг. 4устройство при взаимодействии устрой ства с контролируемым зубчатым колесом, вид сверху на фиг. 5 - электри ческая схема устройства; на фиг. 6блок управления устройством, вид сверху на фиг. 7 - блок-схема блока управления устройством на фиг. & клавиатура, вид в плане. Устройство вклгочает в себя (фиг.1 измерительную плиту 1, на которой расположено контролируемое зубчатое колесо 2. Рядом с измерительной плитой 1 установлен стол 3, регулируемьш по высоте, на котором размещен механический измерительный блок 4 устройства. Механический измерительньм блок 4 содержит основание 5 с тремя лапками 6, которые при помощи установочных винтов 7 могут устанавливаться по высоте. На верхней поверхности основания 5 выполнена продольная направляющая 8 в виде двух параллель ных пазов на всю длину основания 5 по которой могут перемещаться пос-. редством винта 9 ползун 10. Ходовой винт 9 установлен на опоре неподвижно в осевом направлении на левом Кфиг. 1) конце основания 5 и может приводиться во вращение посредством серводвигателя 11. Серводвигатель 11 вместе с приданным ему тахогенератором 12 электрически соединен с регулятором 13с сервоусилителем. Вдол направляющей 8 установлена линейка 14, по которой производят отсчет при помощи помещенной на ползуне. 10 считьюающей головки 15, и таким образом, в любой момент известно положение ползуна 10 относительно выбираемой нулевой точки. Под прямым углом к продольной нап равляющей 8 проходит направляющая 16 1 386 которая образована на ползуне И). Вдоль поперечной направляющей 16 могут перемещаться посредством ходового пинта 17 поперечные са.пазки 18. Ходовой винт 17 установлен не подвнжно в осевом направлении на переднем конце ползуна 10 и может приводиться во вращение посредством серводвигателя 1 9. Серводвигатель 19 вместе с приданным ему тахогенератором 20 электрически соединен с регулятором 21 с сервоусилителем. Вдоль поперечной направляющей 16 установлена линейка 22, с которой снимаются отсчеты посредством считывающей головки 23. Лапки 6 основания 5 установлены так, что продольная и поперечная направляющие 8 и 16 проходят под прямым углом к оси А контролируемого зубчатого колеса 2, т.е. приводят плоскость прямоугольной коорди:натной системы отсчета с осями Х-У |В плоскость, нормальную оси контроли|руемого зубчатого колеса 2. Посредством основания 5 устанавливается параллельно продольной направляющей 8«, пересекающей ось А . контролируемого зубчатого колеса 2 ось X, а ось У проходит параллельно поперечной направляющей 16 и пересекает ось А под прямым углом. Поперечные салазки 18 несут щуп 24, который установлен в закрепленном на этих салазк корпуса измерительного датчика 25, так что его шаровидный свободньй конец подвижен возвратно-поступательно в направлении оси X, при этом изменяется направление измерительного усилия при переходе щупа 24 через среднее положение, которое контролируется измерительным датчиком 25. Измерительный датчик 25 кинематически связан с двумя чувствительными упорами 26, которые выступают по обе стороны параллельнд продольной направляющей 8 из корпуса измерительного датчика 25. С обеих сторон ползуна 10 на продольной направляющей 8 установлены продольные салазки 27, на которых закреплено по одному шаровому установочному наконечнику 28. Продольные салазки 27 не имеют собственного привода и могут перемещаться с усилием, преодолевающим силу трения, вызванную их собственным весом вдоль про-. дольной направляющей 8, т.е. в направлении оси X.. Оба шаровых установочных наконечника 28 (зшолнены сменными. Йа каждых из двух продольных салазках 27, кроме того, закрепленно по одному жесткому упору 29, расположенному со стороны обращенной к ползуну 10 и направленному параллель но продольной направляющей, т.е. в направлении оси X. чувствительных зтора 26 при перемещении попереч ных салазок 18 устанавливаются соосно с жесткими упорами 29 продольных салазок 27. Такое положение поперечных салазок 18 принимается за нулевое положение. Правые продольные салазки 27 (см. фиг. 1) имеют легко доступную и обозримую клавиатуру 30, которая наглядно представлена на фиг. 8. На основании 5, состороны контролируемого зубчатого колеса 2 (см. фиг. 2),.установлен вспомогательньш шариковьй наконечник 31, который перемещается по основанию 5 параллельно оси X, и наряду с шаровым установочным наконечником 28 предусмотрен в качестве третьей опоры измерительного блока на тот случай, если необходимо контролировать профиль боковой поверхности зуба, колеса у которого ось А расположена горизон тально. В этом случае измерительньш блок устанавливается не на стол 3, а на контролируемое зубчатое колесо. При этом оба шаровых установочных наконечника 28 и вспомогательный шариковый наконечник 31 о.&ращены вниз и входят соответственно во впадины между зубьями контролируемого зубчатого колеса 2. При этом измерительньй щуп 24 измерительного датчика 25 также размещается на соединительной прямой межд обоими щаровьми установочными наконечникамн 28. Относительно этой прямой вепомога тельный шариковьй наконечник 31 смещается в направлении оси А койтроли руемого зубчатого колеса 2 так что образует надежную опору на три точки измери ельного блока 4 (фиг, 3). Геометрические предпосылки для проверки профиля боковой поверхности зуба представлены, на фиг. 4. У конт388ролируемого-зубчатогоКолеса 2 (наряду с другими параметрами) известно число зубьев Z, Контролер так размещает измерительный блок 4, что оба Щаровых измерительных наконечника 28 входят в соответствуюпще впадины между зубьями контролируемого зубчатого колеса 2 и прилегают к соседним боковым поверхностям уба. Поэтому, также известно число зубьев KZ между обоими шаровыми измерительными наконечниками 28 (фиг.4 например, четыре зуба). Далее, известна также замеренная в направлении оси X величина С, на которую центральная точка шаровидного щзша 24 отодвинута за соединительн5 линию средних точек обоих, шаровых установочных наконечников 28, когда поперечные салазки 18 примут нулевое положение, в котором жесткие упоры 29 продольных салазок 27 соосны с чувствительными упорами 26 измерительного датчика 25. Однако не известно расстояние между центром щупа 24 и средней точкой (или осью А) контролируемого зубчатого колеса 2, т.е. не известно расстояние 0 (см. фиг. 4). Не известно также расстояние fcR средней точки каждого щаро)вого установочного наконечника 28 до оси А контролируемого зубчатого колеса 2. При данном числе Z зубьев контролируемого зубчатого колеса 2 и выбранном числе К2 расположенных между шаровыми установочными наконечниками 28 зубьев может быть рассчитан угол (Г по следующему уравнению:определения KR можно испольДлязовать следующее уравнение: Sipi где 5 - расстояние между средними точками обоих шаройлх установочных наконечников 28, Согласно фиг. 4 можно опредеить 40 из уравнения , VOsKRcoso +C . (З) Подставляя (t) и (2) в формуу (3), получим ()t .. (4}
Величина YO может быть вычислена посредством измерения расстояния S и известных чисел зубьев Z и KZ, а из этого получается положение оси X для измерительного устройства. Ось X проходит через середину между средними точками обоих шаровых установочных наконечников 28. Таким образом, для ориентирования измерительного блока 4 относительно контролируемого зубчатого колеса 2 достаточно замерить расстояние 5 и из него рассчитать 5 /2 , а также YO.
На фиг. 1 и фиг. 5 показаны электрические клеммы, которые имеют еледующее назначение.
С клеммы 32 подается к регулятору 13 с сервоусилителем заданная величина X, с клеммы 33 производится управление щуп0й 24 измерительного датчика 25 и поджим его по выбору влево или вправо с тем, чтобы он мог ощупьшать правую или левую боковую поверхность зуба,, с клеммы 34 пбдается регулятору 21с сервоусилителем заданная величина У , с клеммы 35 производится снятие сигналов с измерительного датчика 25, которые через переключатель 36 (см. фиг. 5) и клемму 32 подаются к регулятору 13с сер воусилителем, чтобы щуп 24 путем из мерительного датчика 25 копировал ощупъшаемый им профиль боковой поверхности зуба , с клеммы 37 считьшающая головка 23 сообщает фактическое положение поперечных салазок 18 с клеммы 38 считьшающая головка 15 сообщает значение фактического положения ползуна 10.
Альтернативно регулятор 13с сервоусилителем может получать сигналы номинального значения, от вычислителя (фиг. 7). .
Ко всем клеммам 32-35, 37 и 38, а также к клемме 39 выхода клавиатуры 30 подключены провода, которые объединены в общий кабель и соединяют измерительный блок 4 с управляющим блоком 40 (фиг. 6).
К видимым снаружи конструктивныгдетфтям управляющего блока 40 относятся клеммы 41 для упомянутого кабеля, выключатель сети 42, регистратор 43 с бумагой 44, на которой наносятся диаграммы 45 отклонений профиля для правой и левой поверхности зуба, затем - световой указатель 46, который указаывает начало
измерения и клавиатура 47. 1адпнсн на кнопках клавиатуры 47 следующие: ENTER - кнопка записи, CL - кнопка гашения, N - кнолка нумерования для обозначения контролируемого зуба, R - кнопка повтора, ST - останов привода измерительного датчика 25, 0-9 - кнопки цифр, стрелки - позиционирование бумаги и диаграмм в регистраторе 43, точка - показатель увеличения диаграммы 45 профиля, минус - ввод данньгх.
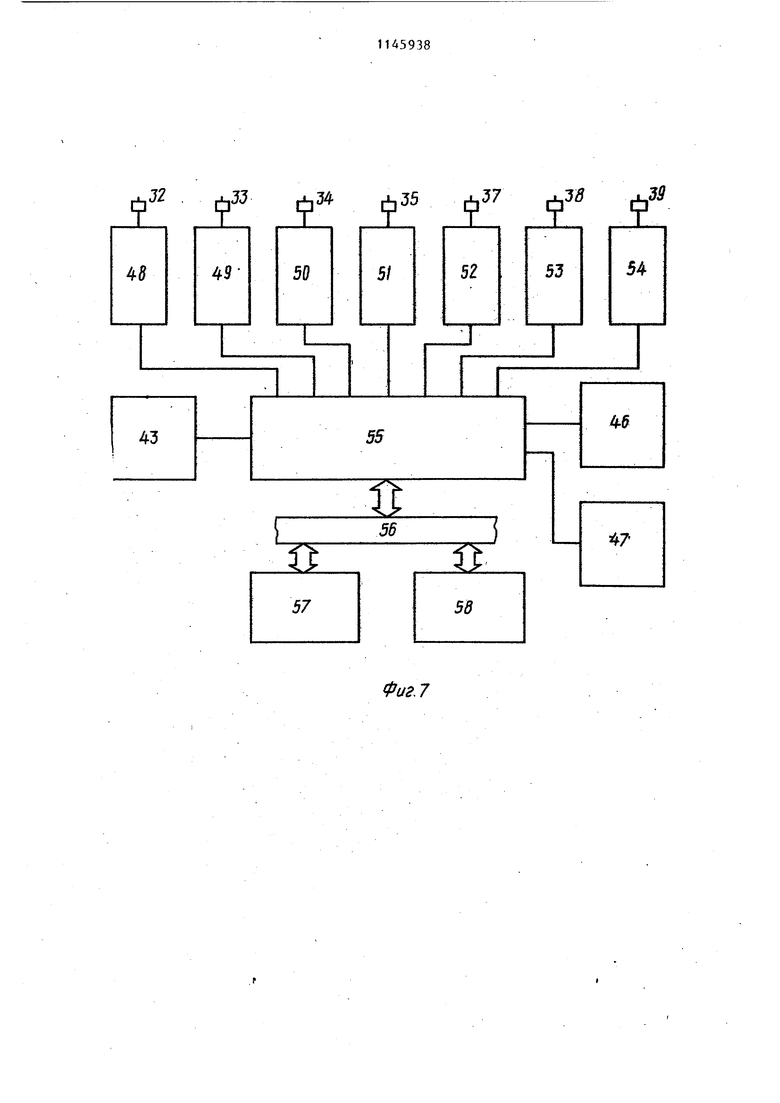
Кроме того, управляющий блок 40 содержит (см. фиг. 7) электронные блоки 48-54, подключенные соответственно к клеммам 32-35, 37 и 38, соединительным с измерительным блоком 4 кабелем.
Электронный блок 48 управляет движением ползуна 10 вдоль оси X.
Электронньй блок 49 предназначен для управления измерительным датчиком 25 для ощупывания правой или левой поверхности зуба.
Электронный блок 50, управляет движением поперечных салазок 18 вдоль оси X. Электронньй блок 51 предназначен для обработки сигналов
поступающих с измерительного датчика 25.Электронный блок 52 1 редназначен для обработки сигналов, поступающих с отсчетной головки 23, и дополнительно включает в себя счетчик и компаратор, которые сравнивают поступающие сигналы с заранее установленной, величиной.
Электронный блок 53 предназначен для обработки сигналов направляющих считьшающей головки 15 и включает в себя счетчик и компаратор.
Электронньй блок 54 предназначен для обработки и передачи набранных кнопками обслуживающих сигналов.
Электронные блоки 48-54 содержат каждьй по одному аналого-цифровому преобразователю.
Все электронные блоки, регистратор 43, световой указатель 46 и клавиатура 47 присоединены к блоку 55 сопряжения, который со своей стороны соединен через резервированный канал 56 с вычислителем 57 и блоком 58 памяти.
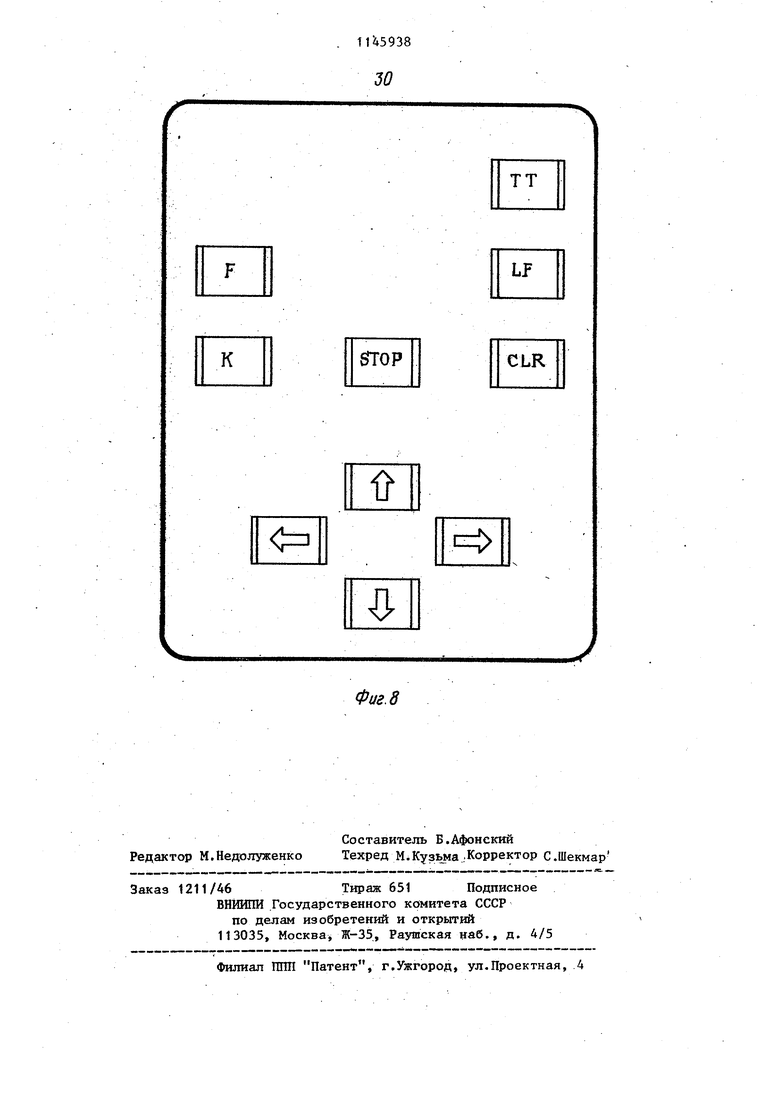
На правых продольных салазках 27 (см. фиг. 1) размещена клавиат.ура 30 Надписи на клавиатуре (см. фиг. 8) обозначают следующие: ТТ - слежение
111
щупа 34 измерительного датчика 25, LF ,- поджим щупа 24 измерительного датчика 25 вправо для ощупьгоания левой боковой поверхности зуба, F установка конечной точки контролируемой поверхности со стороны ножки зуба, К установка конечной точки контролируемой- поверхности со сторон головки зуба, STOP - останов привода ползуна 10 и поперечных салазок 18, CLR - отменяющая кнопка для гашения команд на автоматическое слежение щупа 24 измерительного датчика 25 и установленных конечных точек со / стороны ножки и головки зуба, стрелки - кнопки направления для ручного перемещения ползуна 10 и поперечных салазок 18.
Подготовка и ход проверки профиля боковой поверхности зуба осутцествляется в следующей последовательности.
Управляющий блок 40, получив комаду, перемещает поперечные салазки 18 /в заданную позицию 10, причем изме - рительньй щуп 24 находится при этом вне впадины между зубьями.
Как только позиция УО достигнута, поперечные салазки 18 останавливаются и остаются в позиции 10. Затем сдвигают ползун 10 вправо, пока правьй чувствительный упор 26 не упрется в жесткой упор 29 продольных салазок 27. Далее сдвигают ползун влево до жесткого упора 29 левых продольных салазок 27.
Величина пройденного пути запоминается, вычисляются параметры УОи 5/2. Затем отводят ползун 10-на половину размера пройденного пути. Щуп 2 имеет относительно шаровых установочных наконечников-28 одинаковьй интервал. .
Затем устанавливают ползун 10 на половину размера пройденного пути. Щуп 24 имеет относительно шаровых установочных наконечников 28 одинаковьй интервал.
Затем устанавливает щуп в положение УЕ, которое образуется как .среднее арифметическое из размеров УР и УК, (см. фиг. 4).
Если наперед выбранное число зу бьев четное, то поперечные салаз3812
ки 18 перемещаются в направлении контролируемого зубчатого колеса 2, пока щуп 24 не будет име.ть заданного расстояния УЕ до оси А контролируемого зубчатого колеса 2.
Затем поперечные салазки 18 двигаются влево, пока щуп 24 не упрется в правую боковую поверхность зуба с наперед заданным поджимом.
Пройденный путь замеряется обычным известным образом, середина впадины зуба определяется делением пополам замеренного пути.
Если заранее выбранное число зубьев нечетное, то поперечные салазки сдвигаются на расчетную величну в Х-направлении влево и после этого входит во впадину зуба и затем приходит в соприкосновение с плевой боковой поверхностью зуба с заданным усилием прижатия в тюзицию 3
Затем в такой же последовательности, как и при четном числе зубье ползун 10 становится в нулевую позицию. Для этого щуп 24 отодвигается в позицию УО и в этом положении передвигается к правой-впадине зуба Затем перемещают щуп 24 в правую впадину зуба, пока щуп не придет в соприкосновение с правой боковой поверхностью зуба в положение УЕ от оси А зубчатого колеса.
При этом середина зуба вычисляется. Размер ХЕ вычисляется путем деления содержимого Х-счетчика пополам .
Этим подготовка узлов заканчивается.
Затем перемещают щуп 24 в положение УР. Из положения УР щуп 24 rtepeмещается по рассчитанной теоретической эвольвенте и измерительный датчик 25 фиксирует отклонение щупа 24, контактирующего с контролируемым профилем зуба, от теоретической эвольвенты. Это отклонение записью а- ют на диаграммнзтю бумагу 44 регист ратора 43. . ,
Использование изобретения позвопит повысить точность контроля .профиля зуба зубчатых колес. S 32
28
25 2 18
j4n 96 /, № JO 29
27
J
шгЬ:.---2ГЖ1 H
iifiiiii.
28
27
/ § J/
d/.f J J
фаг А
4
44
/.;
46
a
шик
.4f
f
47 32 33 34 ф35
50
54
52
53 в 39
43
И
57
И
55
Фиг. 7 30
Фиг. 8
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Марков А.Л | |||
| Измерение зубчатых колес | |||
| Л., Машиностроение, 1968, с | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
| Пуговица | 0 |
|
SU83A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Werkstatt und Bitieb, 1960, № 5, с | |||
| Приспособление для картограмм | 1921 |
|
SU247A1 |
