Изобретение относится к электромашиностроению и может быть использовано в автоматизированном электроприводе.
Цель изобретения - расширение эксплуатационных возможностей и повышение надежности.
На фиг. 1 представлен электродвигатель, продольный разрез; на фиг. 2 и 3 - геометрические построения, поясняющие вывод математического выражения для средней линии паза.
Двигатель состоит из разъемного корпуса 1 с многофазным статором 2 с обмотками 3 управления, дискового ротора 4 с шестерней 5, установленного на корпусе посредством узла шаровой опоры 6, рычага
7,прикрепленного к ротору 4 и снабженного пальцем 8, сферического элемента корпуса 9, имеющего паз заданной формы, с которым взаимодействует выступ 10 пальца
8,подвижной шестерни 11 с выходным полым валом 12, установленным в подшипниках 13. Узел 6 крепления ротора к корпусу выполнен таким образом, что позволяет ротору принимать наклонное к статору положение и совершать колебательное движение, исключая поворот ротора относительно корпуса.
Двигатель работает следующим образом.
При поочередном подключении обмоток 3 статора 2 к источнику питания дисковый ротор 4 с помощью узла шаровой опоры 6 совершает колебательное движение, при этом происходит обкатывание колес 5 и 11. Так как обкатывающий дисковый ротор 4 остановлен от собственного вращения узлом 6, вращательное движение передается подвижной шестерне 11 и соответственно выходному полому валу 12. Вовремя работы двигателя выступ 10 пальца 8 движется в пазу заданной формы сферического элемента 9, при этом между стенками паза и выступом 10 сохраняется гарантированный зазор. После снятия напряжения питания с обмоток 3 статора 2 ротор 4 и выходной полый вал 12 сохраняют конечное положение, так как паз сферического элемента 9 фиксирует выступ 10 пальца 8 в заданном положении и препятствует выходу из зацепления шестерен 5 и 11.
Для определения формы паза решалась задача определения траектории движения какой-либо точки жесткого дискового ротора, совершающего колебательное движение вокруг неподвижной центральной точки без собственного вращения вокруг продольной оси.
Для определения положения ротора в неподвижной правой прямоугольной системе координат центральную точку ротора, относительно которой происходит колебательное движение, необходимо поместить в точку О начала координат. При этом согласно фиг. 2 ось ординат (ось OY) совпадает с продольной осью двигателя и направлена слева направо, ось аппликат (ось OZ) расположена перпендикулярно к оси OY и направлена снизу вверх, ось абсцисс (ось ОХ)
расположена перпендикулярно плоскости YOZ.
В качестве подвижной оси OYi выбрана прямая, перпендикулярная плоскости ротора, проходящая через точку О. Таким образом, ось OYi является продольной осью ротора. Под плоскостью ротора понимается сечение тела ротора плоскостью, параллельной торцовой поверхности физического ротора и проходящей через точку начала
координат.
В процессе рабочего колебательного движения ротора относительно точки О, ось OYi описывает коническую поверхность и, следовательно, является образующей прямого корпуса с вершиной в точке О. Любое сечение этой конической поверхности плоскостью L, параллельной плоскости XOZ представляет собой окружность (фиг. 3). Точка М (фи(. 3) является точкой пересечения оси OYi (фиг. 2 и 3) с плоскостью L (фиг. 3). В процессе работы двигателя точка описывает в пространстве окружность радиусом r IOMI siny,(1)
где ЮМ I - расстояние от точки О до точки
М (фиг. 3);
у- угол между осями OY и OYi. Положение точки на направляющей окружности конуса зэкоординировано углом у (фиг. 3) - углом между проекцией оси
OZ на плоскость L и радиусом - вектором ВМ. точка В - центр направляющей окружности конуса (фиг. 3). За положительное направление угла р принято направление против часовой стрелки, если смотреть на
плоскость XOZ со стороны конца оси OYi.
Таким образом, угол определяет положение продольной оси ротора, совершающего колебательное движение, и, следовательно, определяет положение точек ротоРа.
Рассматривалось положение точки А (фиг. 3) ротора, удаленной вдоль продольной оси ротора на расстояние I и в радиальном направлении на расстояние R, в зависимо5 сти от величины угла р. Траекторию движения точки А (координаты хд.уд.гд) ротора, совершающего колебательное движение, как функцию угла определяли в виде следующей системы уравнений:
fx fi(l, R, } ./);
) у f2 (I. R, у, уз);(2)
z - f3 (I. R. у, y).
Угол между осями OY и OYi (фиг. 2 и 3) совпадает с углом наклона дискового ротора, в рабочем положении относительно оси
OZ, а угол р 4- т определяет направление на
середину зоны контакта зубьее с зубчатым венцом статора.
В результате математических преобразований система (2) окончательно принимает вид:
sin у sin if
R sin у sin
2 vi
у I cos }
R sin2ycos у 2 v -sin ycos2
У
sin2 ycos2 y.
z I sin у cos y - R v1
Таким образом, если потребовать чтобы при отключении напряжения питания двигателя какая-либо точка ротора имела координаты, удовлетворяющие систему (3), то ротор окажется зафиксированным в рабочем положении.
Технически реялизовать такой режим можно с помощью паза на сферическом сегменте элемента корпуса и пальца ротора, взаимодействующего с пазом. При этом координаты точек середины паза должны удовлетворять систему (3).
Однако для технической реализации фиксации ротора устройства необходимо выполнение определенных геометрических соотношений для двигателя, связывающих радиусы начальных окружностей зубчатых колес, угол наклона колеблющегося ротора и модуль зацепления.
Анализ системы (3) показывает, что при малых R и у координаты х, у, z, при изменении (f принимают разные по порядку величины, относительно большие величины координат у и z и довольно малые величины координаты х. Это подтверждается расчетами по (3). Однако для крупных двигателей (R2 100 мм) с у 10° величина координаты х при работе двигателя принимает значения, позволяющие технологически выполнять паз по системе (3).
Таким образом устройство фиксации вала может быть использовано в конструкциях
двигателей с колеблющимся ротором относительно большого диаметра с углом его наклона порядка 10°. Двигатели, имеющие пустотелый вал, как правило, обладают
5 крупными размерами, позволяющими использовать фиксатор в виде пальца, взаимодействующего с пазом заданной формы. Поэтому двигатель с расширенными эксплуатационными возможностями за счет поло10 го вала способен фиксировать выходной полый вал в заданном положении в обесточенном состоянии. При этом не требуется внешних сигнальных и исполнительных устройств для фиксации ротора, отсутствуетдо15 полнительное электрооборудование для фиксации ротора и практически сохраняются габариты двигателя, что ведет к повышению надежности устройства.
20 Формула изобретения
Шаговый электродвигатель с колеблющимся ротором, содержащий корпус с закрепленным в нем торцовым статором с обмоткой, дисковый ротор с зубчатой повер25 хностью обкатывания и узлом, удерживающим его от собственного вращения, расположенным на корпусе, выходной вал. с установленным на нем торцовым зубчатым колесом и узел фиксации выходного вала после
30 снятия напряжения питания, отличающийся тем, что, с целью расширения эксплуатационных возможностей и повышения надежности, выходной вал выполнен полым, а узел фиксации выходного вала вы35 полней в виде паза в корпусе и пальца на диске ротора, помещенного в паз, при этом координаты точек средней линии паза выбраны в соответствии с выражениями
. ,R sin2 у sin 2 р
40х I sin у sin р - ;
2 V1 -cosVsin У
.Rsin2ycos /5
V ГПЧ V - -J
У и:
2 vi -cos
z I sin у cos /)+ R cos2 y sin2y, где I - длина пальца;
R - радиус, на котором установлен палец;
У угол наклона оси ротора относительно продольной оси двигателя;
f - угловая координата положения линии минимального зазора.
Л/юсхос/я& pomo/yQ

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ ДАТЧИКА УГЛА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 1994 |
|
RU2114396C1 |
| Шаговой электродвигатель с колеблющимся ротором | 1973 |
|
SU493869A1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С РАСПОЛОЖЕНИЕМ ПОРШНЕЙ ПАРАЛЛЕЛЬНО ОСИ ВРАЩЕНИЯ РОТОРА | 2003 |
|
RU2278284C2 |
| МОТОР-РЕДУКТОР С ИНТЕГРИРОВАННЫМ ПРЕЦЕССИРУЮЩИМ ЗУБЧАТЫМ КОЛЕСОМ (ВАРИАНТЫ) | 2013 |
|
RU2538478C1 |
| РОТОРНЫЙ СФЕРИЧЕСКИЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2001 |
|
RU2227211C2 |
| Шаговый электродвигатель с колеблющимся дисковым ротором | 1975 |
|
SU588599A1 |
| ТОРЦЕВОЙ ЭЛЕКТРОДВИГАТЕЛЬ С КАЧАЮЩИМСЯ РОТОРОМ | 2019 |
|
RU2720887C1 |
| ОБЪЕМНАЯ МАШИНА САВИНА | 1992 |
|
RU2016241C1 |
| Шаговый электродвигатель с колеблющимся ротором | 1987 |
|
SU1598066A1 |
| Шаровой двигатель внутреннего сгорания | 2018 |
|
RU2680913C1 |

Изобретение относится к электротехнике и может быть использовано в автоматизированном электроприводе. Целью изобретения является расширение эксплуатационных возможностей и повышение надежности. Двигатель состоит из разьемного корпуса 1 с многофазным статором 2 с обмотками управления 3, дискового ротора 4 с шестерней (колесом) 5, установленного на А 12 корпусе посредством шаровой опоры 6, рычага 7. прикрепленного к ротору 4 и снабженного пальцем 8, сферического элемента 9 корпуса, имеющего паз заданной формы, с которым взаимодействует выступ 10 пальца 8, подвижной шестерни (колеса) 11 с выходным полым валом 12, установленным в подшипниках 13. При поочередном подключении обмоток 3 к источнику питания дисковый ротор 4 совершает колебательное движение, при этом происходит обкатывание колес 5 и 11. Из-за разницы зубьев этих колес подвижная шестерня 11, а вместе с ней полый выходной вал будут иметь малую частоту вращения. После отключения питания, вал 12 сохраняет свое положение, так как паз сферического элемента 9 фиксирует выступ 10 пальца 8 в заданном положении и препятствует выходу из зацепления шестерен 5 и 11. Полый вал расширяет эксплуатационные возможности, фиксация вала при обесточенном двигателе повышает надежность. 3 ил. 3 2 1 (Л С о ю со СП ю Фиг 1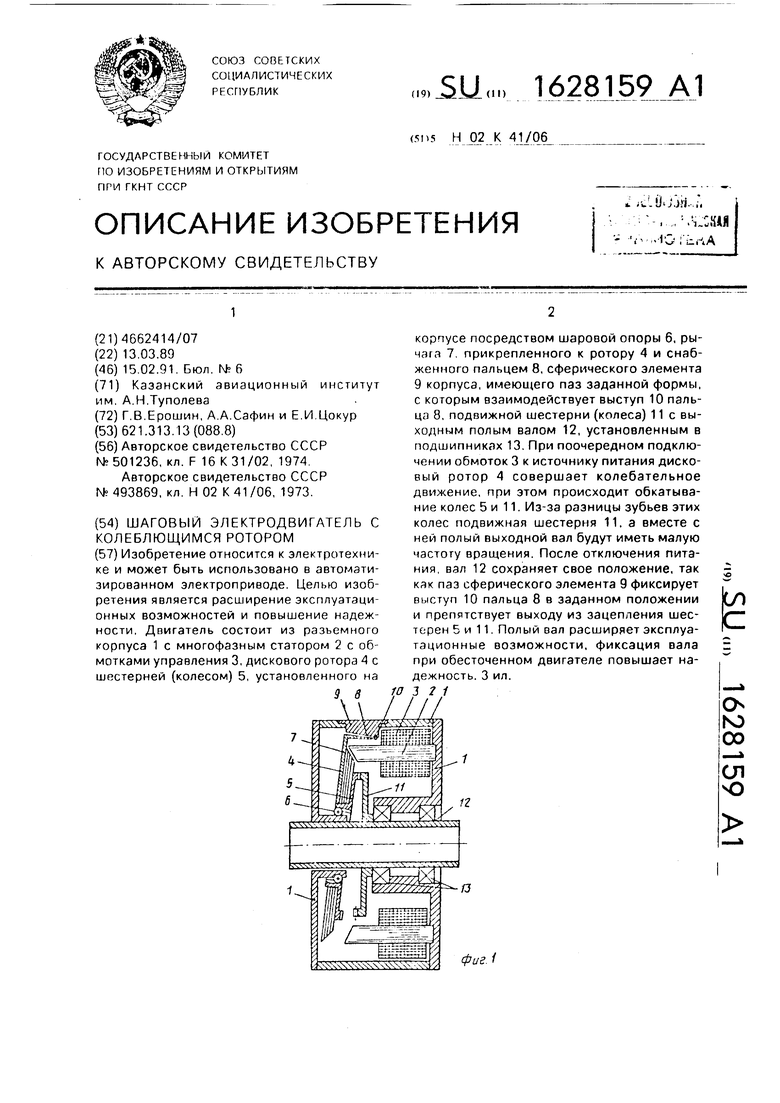
9ur3
| Привод для передачи врашения в герметичную полость | 1974 |
|
SU501236A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
