1
(21)4207019/ 40-11
(22)13.01.87
(tt6) 23.12.83. Бюл. N° 47
(71)Харьковское конструкторско-техно- логическое бюро ЦК ДОСААФ СССР
(72)А.П.Лавриненко и М.Я.Бернштейн (53) 681.136.5 (088.8)
(56)Авторское свидетельство СССР № 1008765, кл. G 09 В , 1981.
(S) УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ
(57)Изобретение относится к устройствам обучения и может найти применение в автомобильных и им подобных тренажерах при подготовке и проверке квалификации водителей. Целью изобретения является повышение эффективности обучения на тренажере за счет аппаратурного обеспечения возможности формирования у обучаемых моторных навыков в управлении транспортным средством, обеспечение учета индивидуальных особенностей обучаемых за счет организации работы устройства в режиме Самоконтроль и ждущего режима работы блоков, организация аппаратурного анализа информации, необходимой для определения качества подготовки обучаемого. Устройство снабжено за- датчиком последовательности действий, блоком анализа ошибок и блоком счета времени выполнения учебных программ. Обучаемый выполняет требуемые алгоритмом программы действия по управлению тренажером. Алгоритм действий в устройстве закладывается конструктивно и выполняется с максимальным подобием той последовательности действий, которую необходимо выполнять водителю при управлении реальным автомобилем. Анализ качества проведенного вождения на тренажере с помощью предлагаемого устройства осуществляется как укрупненный (по общему числу ошибок и времени выполнения прог- рамм), так и дифференцированный по каждому органу управления тренспорт- ного средства с указанием моментов (задач) в учебной программе, где были допущены ошибки. 2 з.п.ф-лм, 1 ил.
СЛ
СП
со
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВОЙ ТРЕНАЖЕР ВОЖДЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2010 |
|
RU2433483C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| Тренажер оператора автоматизированных систем управления | 1982 |
|
SU1132302A1 |
| Тренажер операторов железнодорожных сортировочных горок | 1979 |
|
SU875436A1 |
| Тренажер оператора систем передачи информации с обратной связью | 1982 |
|
SU1068972A1 |
| ТРЕНАЖЕРНО-ОБУЧАЮЩАЯСЯ СИСТЕМА | 2024 |
|
RU2834774C1 |
| Тренажер оператора систем передачи информации | 1988 |
|
SU1564677A1 |
| АВИАЦИОННЫЙ ТРЕНАЖЕР МОДУЛЬНОЙ КОНСТРУКЦИИ | 2004 |
|
RU2247430C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ МЕХАНИКА-ВОДИТЕЛЯ БРОНИРОВАННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2285958C1 |
Изобретение относится к устройствам обучения и может найти применение в автомобильных и им подобных тренажерах при подготовке и проверке квалификации водителей. Целью изобретения является повышение эффективности обучения на тренажере за счет аппаратурного обеспечения возможности формирования у обучаемых моторных навыков в управлении транспортным средством, обеспечение учета индивидуальных особенностей обучаемых за счет организации работы устройства в режиме "Самоконтроль" и ждущего режима работы блоков, организация аппаратурного анализа информации, необходимой для определения качества подготовки обучаемого. Устройство снабжено задатчиком последвательности действий, блоком анализа ошибок и блоком счета времени выполнения учебных программ. Обучаемый выполняет требуемые алгоритмом программы действия по управлению тренажером. Алгоритм действий в устройстве закладывается конструктивно и выполняется с максимальным подобием той последовательности действий, которую необходимо выполнять водителю при управлении реальным автомобилем. Анализ качества проведенного вождения на тренажере с помощью предлагаемого устройства осуществляется как укрупненный (по общему числу ошибок и времени выполнения программ), так и дифференцированный по каждому органу управления транспортного средства с указанием моментов (задач) в учебной программе, где были допущены ошибки.
Изобретение относится к обучающим устройствам и может найти применение в автомобильных и им подобных тренажерах при подготовке и проверке квалификации водителей.
Цель изобретения - повышение эффективности обучения.
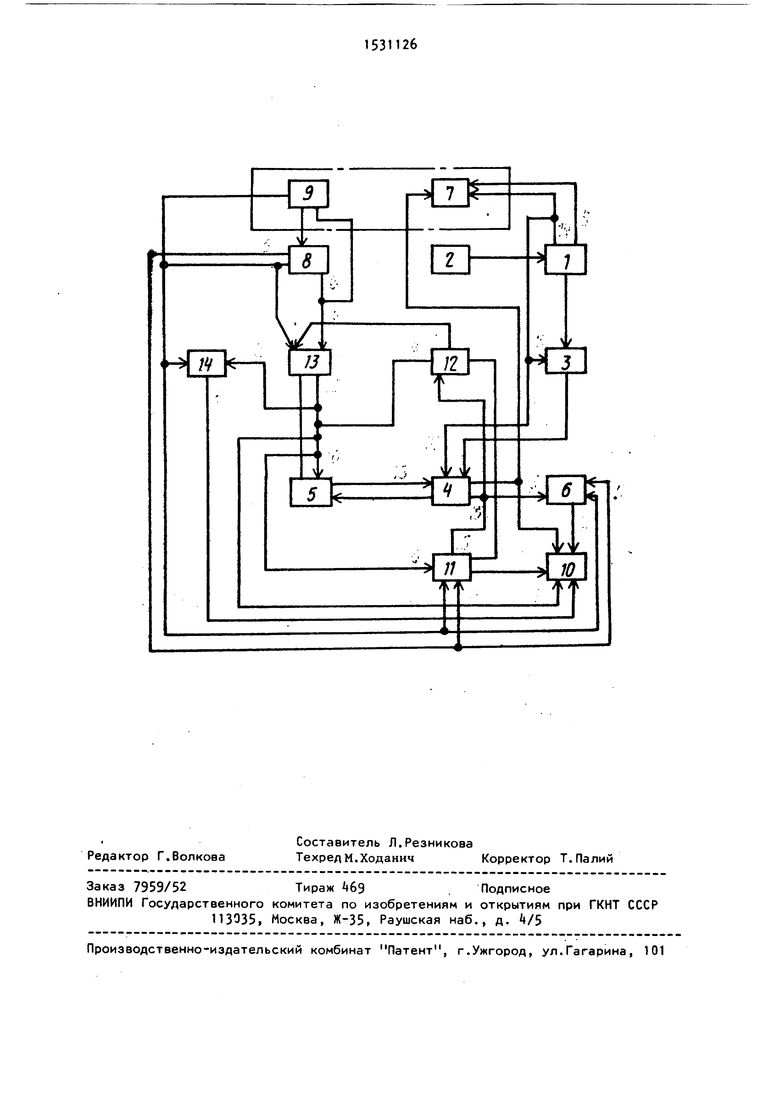
На чертеже представлена функциональная блок-схема предложенного устройства.
Устройство содержит блок 1 датчиков положения органов 2 управления, расположенных на рабочем месте обучаемого, выход которого соединен с входом блока 3 моделирования динамики движения, подключенного выходом к входу блока 3 логического контроля последовательности действий, другие входы которого соединены с выходом блок; 1 датчиков положения органов 2 управления и задатчика 5 последовательности действий, а выходы - с входом блока 6 оценки, входом за
датчика 5 последовательности действий и блоком 7 индикации.
Входы блока 6 оценки подключены к выходу задатчиков 8 и 9 режима обучения , а выход - к одному из входов блка 10 индика ции, другой вход которог соединен с одним из выходов блока 11 анализа ошибок, другой выход которого подключен к одному из входов блока 12 адаптации, другие входы которого соединены с выходом задатчика 13 программы обучения и блока логического контроля последовательности дейстпий,
стройство содержит блок счета ноемени. Инструктор с помощью задатчика 9 режима обучения задает один из режимов обучения на тренажере Контроль либо Самоконтроль.
В режиме Самоконтроль управлени Г|роцессом обучения передается на за- датчик 8 режима обучения. При этом nfiy земый в зависимости от его начальной тренированности и с соблюдением принципа от простого к слож- Н Н у определяет необходимую последовательность выполнения программ в процессе обучения путем нажатия на одну из кнопок переключателя Программа и одновременно производит установку в исходное состояние зэдатчи ка 13 программы обучения блока 6 -- оценки, блока 11 анализа ошибок и блока I i счета времени выполнения учебных программ.
В режиме Контроль управление процессом обучения осуществляется задатчиком 9, при этом инструктор сам определяет и задает обучаемому требуемую последовательность выполнения программ путем соответствующих переключений аналогичного переключателя Программа, а также производит установку в исходное состояние за- датцикэ 13 и блоков 6, П и 1.
Независимо от режима обучения (Контроль или Самоконтроль) обучаемый выполняет требуемые алгоритмом программы действия по управ- ЛС1-1И10 тренажером. Алгоритм действий в устройстве закладывается конструктивно и вьтолняется с максимальным подобием той последовательности дей ствий, которую необходимо выполнять водителю при управлении реальным
10
15
20
25
30
- 35
311264
автомобилем. Последовательность действий, которые при управлении автомобилем необходимо выполнять в строгой очередности заложена в устройстве жестко, т.е. не допускает перестановок при их выполнении. В то же время те действия, которые при управлении автомобилем не являются обязательными, либо допускают изменения в после- вательности при их выполнении, аналогично заложены и в алгоритме устройства, т.е. не являются обязательными либо допускают определенные изменения последовательности их выполнения.
При выполнении программ обучаемый воздействует на блок 2 органов управления (педалей сцепления, рабочего тормоза, управления дросселями, рычага переключения передач, рычага раздаточной коробки, стояночного тормоза переключателя, указателя поворотов и т.п.). Блок 1 датчиков сбора информации преобразует механические перемещения органов управления в электрические сигналы. Сигналы с блока 1 датчиков сбора информации поступают в блок 7 индикации для обучающего в блок Ц логического, контроля последовательности действий и в блок 3 моделирования динамики движения. В зависимости от режима Контроль или Самоконтроль сигналы программ в задат- чик 13 поступают или с задатчика 9, или с задатчика 8.
В задатчике 13 происходит формирование команд в зависимости от сигнала программы. Сигналы команд поступают в задатчик j последовательности действий, в блок 11 анализа ошибок, в блок 12 адаптации и в блок 10 индикации. В блок I t счета времени выполнения учебных программ поступает си1- нал начала выполнения программы с эа- датчика 13, по которому начинается отсчет времени. В задатчике 5 формируется заданная последовательность действий в каждой из команд. Сигналы заданной последовательности действий с задатчика 5 поступают в блок k логического контроля последовательности действий, где сравниваются с сигналами действий обучаемого последующими с блока 1 датчиков. Если алгоритм действий обучаемым не нарушен, то сигнал совпадения поступает с блока 4 в задатчик 5 для смены заданного действия на последующее.
При выполнении последнего деист- ВИЯ а команде сигналы смены команды с задатчика 5 поступают в задатчик 13. При выполнении последней команды в программе с задатчика 13 в блок 1А счета времени выполнения учебных команд поступает сигнал останова счета времени.
Сигналы на индикатор времени выполнения программы поступают с блока в блок 10 индикации информации для обучаемого.
При несовпадении заданного програм10
в исходное состояние задатчиков 13, 5 блока t. В этом случае, как и в предыдущем, выполнение программы начинается сначала, а счет ошибок и времени выполнения программы продолжается .
После выполнения всей программы с пульта управления обучаемого на блок 11 анализа ошибок и блок 6 оцен ки поступают сигналы на анализ дейст вий обучаемого по каждому из органов управления. При этом с блока 6 оценки на блок 11 индикации информамой и совершаемого действия в блоке ции для обучаемого поступают сигналы
логического контроля последовательности действий анализируется совершенное действие. Если оно является допускаемым по алгоритму действий, то сигнал ошибки не вырабатывается, в противном случае общий сигнал ошибки поступает в блок 2 индикации информации для обучаемого. В блоке 10 высвечивается транспарант Неверно. Сигнал дифференцированной ошибки по каждому из органов управления поступает в блок 8 объективной оценки и в блок 11 анализа ошибок. После возврата обучаемым органа управления, по , которому была совершена ошибка, в предыдущее состояние, т.е. после устранения допущенной ошибки транспарант Неверно гаснет и обучаемый может продолжать выполнение программы.
При совершении грубой ошибки си1- нал с блока 3 моделирования динамики движения поступает в блок логического контроля последовательности действий, а с блока - в блок 12 адаптации, где происходит анализ допущенной ошибки в зависимости от заданной для обучаемого обстановки.
Если допущенная ошибка могла привести к аварийной ситуации, то с блока 12 в задатчик 13 поступает сигнал изменения команды обучения. В задатчике 13 происходит формирование команды в соответствии с поступившим сигналом. В этом случае выполнение программы начинается сначала, т.е. происходит повторение обучения в тех же условиях, а счет ошибок и времени выполнения программы продолжается,
Если обучаемый после совершения ошибки своевременно не устраняет ее и допускает еще одну ошибку любым органом управления сигнал с блока 11 анализа ошибок поступает в блок 12, где формируется импульс установки
в исходное состояние задатчиков 13, 5 блока t. В этом случае, как и в предыдущем, выполнение программы начинается сначала, а счет ошибок и времени выполнения программы продолжается .
После выполнения всей программы с пульта управления обучаемого на блок 11 анализа ошибок и блок 6 оценки поступают сигналы на анализ действий обучаемого по каждому из органов управления. При этом с блока 6 оценки на блок 11 индикации информации для обучаемого поступают сигналы
5
количества ошибок по каждому анализируемому органу управления, а с блока 11 аналила ошибок - на блок 10 индикации сигналы команд, в которых
0 были допущены ошибки по анализируемому органу управления. С блока 14 на блок 10 поступает сигнал времени выполнения программы в целом.
Таким образом, обучаемый в режиме
5 Самоконтроль получает возможность самостоятельно (без помощи инструктора) обучаться на тренажере и получать информацию о правильности либо ошибочности выполняемых им one-
0 раций по управлению транспортного средства, анализировать по окончанию программы допускаемые им ошибки во времени и дифференцированно по каждому органу управления, исправлять допускаемые ошибки при обучении путем многократных тренировок.
В режиме Контроль функции управления процессом обучения вследствие проводимых аппаратурных переключений.
Q передаются инструктору. Вся информация о качестве подготовки обучаемого передается на пульт обучающего. При этом в случае необходимости инструктор имеет возможность в контакте с обучаемым непосредственно на месте произвести аппаратурный анализ проведенного вождения при обучении на тренажере и дать рекомендации по устранению обнаруженных ошибок.
Анализ качества проведенного вождения на тренажере с помощью предлагаемого устройства осуществляется как укрупненный (по общему числу ошибок и времени выполнения программ), так и дифференцированный по каждому органу управления транспортного средства с указанием моментов (задач) в учебной программе, где были допущены ошибки.
5
0
5
Предлагаемое устройство позволяет учитывать индивидуальные особенности обучаемого за счет аппаратурного обеспечения возможности подачи последующей учебной команды только после правильного выполнения последовательности действий в предыдущей.
формула изобретения
0
0
5
с вторым выходом блока датчиков положения органов управления, а второй и третий выходы соответственно - с первым входом блока адаптации, с первым входом второго блока индикации.и с вторым входом блока индикации, третий вход которого подключен к выходу задатчика программы обучения, а второй вход второго блока индикации связан с выходом блока датчиков положения органов управления.
а выходы соответственно - с четвертым входом блока индикации, пятый выход которого соединен с выходом блока счета времени.
30
