Изобретение относится к дуговой сварке м может быть использовано при разработке роботов для дуговой сварки, автоматических сварочных установок.
Цель изобретения - повышение качества систем управления путем учета динамических характеристик канала подачи электродной проволоки при синтезе систем управления процессом дуговой сварки.
На чертеже представлена блок-схема устройства для реализации способа идентификации динамических характеристик канала подачи электродной проволоки.
Устройство содержит идентифицируемый канал подачи электродной проволоки, включающий механизм подачи электродной проволоки 1, тракт подачи электродной проволоки 2, горелку 3 и меченую электродную проволоку 4, облучаемую источником излучения 5 и отражающую световой поток, который воспринимается датчиком отраженного излучения (датчиком скорости) 6. Датчик скорости 6 соединен с одним из входов устройства регистрации 7, в качестве которого может быть использован светолуче- вой осциллограф. Светолучевой осциллограф регистрирует входную информацию на светочувствительной бумаге, например УФ-67 8. На другой вход регистрирующего устройства поступают сигналы по линии связи из устройства управления 9. На третий вход регистрирующего устройства поступают сигналы таймера 10, причем устройство управления 9 и таймер 10 связаны между собой. Устройство управления 9 взаимодействует с каналом подачи электродной проволоки через задающее устройство управ- ляющег О воздействия 11. Кроме того, на задающее устройство 1 I подаются сигналы от таймера 10.
Устройство работает следующим образом.
При постоянном задающем воздействии и установившейся скорости подачи электродной проволоки наступает статическое состояние работы устройства. В данном состоянии неизменяющееся задающее воздействие на механизм подачи электродной проволоки 1 вызывает неизменяющуюся скорость подачи э.1ектродной проволоки. Метки, нанесенные равномерно по длине электродной проволоки 4. модулируют световой поток источника излучения 5. Модулированный световой поток измеряется датчиком отраженного излучения, являющимся датчиком скорости подачи электродной проволоки 6. С выхода датчика 6 частотномодулированный сигнал скорости подачи электродной проволоки поступает на один из входов регистрирующего устройства, в качестве которого может использоваться светолучевой осцииллограф 7. На другом входе светолучевого осциллографа регистрируется уровень сигнала управляющего воздействия, который вырабатывается устройством управления 9. Вырабатываемый устройством управления уровень управляющего воздействия поступает также на задающее устройство 11 канала подачи электродной проволоки. Приведенный порядок операций позволяет идентифицировать статические характеристики канала подачи электродной проволоки.
Для идентификации динамических характеристик канала подачи электродной проволоки необходимо определить реакцию канала на скачкообразное изменение управляющего воздействия, временные задержки, запаздывания. Для синхронизации во времени используется датчик временных интервалов 10, который работает под управлением устройства управления 9 и выдает сигналы синхронизации на задающее устройство 11 и устройство регистрации 7. Изменение управляющего воздействия в момент времени, определяемый датчиком временных интервалов (таймером) 10 поступает одно временно на задающее устройство механизма подачи электродной проволоки и устройство регистрации. Данный момент времени регистрируется на светочувствительной бумаге 8. В канале подачи электродной проволоки начинается переходной процесс, т. е.
5 происходит изменение скорости подачи электродной проволоки, которое вызывает изменение частоты светового потока, поступающего на датчик 6. Изменение частоты светового потока датчиком 6 преобразуется в из.менение частоты электрического
0
сигнала, поступающего на светолучевои ос
циллограф 7, который фиксирует изменение скорости подачи электродной проволоки на светочувствительной бумаге 8.
Динамические характеристики определяют по информации, зафиксированной на
светочувствительной бумаге 8.
Конструктивно блок управления 9 представляет собой микроэвм, серийно выпускаемую в СССР. Задающее устройство 11 представляет собой блок сопряжения, интерфейс, между микроЭВМ 9 и механизмом подачи электродной проволоки. Конструктивно задающее устройство представляет собой печатную плату с набором дискретных электрорадиоэлементов. Датчик временных интервалов (таймер) 10 представляет собой
функциональный модуль, выдающий сигнал через фиксированный момент времени. Таймер представляет собой печатную плату с набором электрорадиоэлементов (некоторые из микроэвм имеют таймеры в своем составе в качестве функциональных модулей). Пример. Устройство для идентификации динамических характеристик канала подачи электродной проволоки промыщленного робототехнологического комплекса для сварки РБ-251.
В качестве датчика скорости сварки 6
может быть использован оптический датчик. В качестве регистрирующего устройства 8 - светолучевой осциллограф Н-117 со светочувствительной бумагой УФ-67 8, в качест
ве устройства управления - микроЭВМ Электроника К1-20, в качестве датчика временных интервалов - микросхема К- 580ВИ53, в качестве задающего устройства - самостоятельно разработанный узел согласования микроЭВМ. Электроника К1 - 20 с механизмом подачи электродной проволоки. Конкретные технологические параметры при работе данной установки: Управляющее воздействие20i6--EO|6
Скорость подачи проволоки, мм/с2-20
Постоянная времени, запаздывания, с1,5
Учет временных запаздываний (1,5 с) позволяет учесть динамические характе- ристики при выработке управляющих воздействий механизма подачи электродной проволоки, в соответствии с динамической моделью процесса.
Последовательность действий, осуществляющих данный способ идентификации ди- намических характеристик канала подачи электродной проволоки посредством данного устройства, имеет вид: и.аентифицируемый канал подачи электродной проволоки, включающий механизм подачи проволоки 1, тракт 2, горелку 3, работает в установившемся режиме, т. е. скорость подачи меченой электродной проволоки 4 постоян+ia при пос- тоянно.м : алаЮ1цем воздействии на привод со стороны задающего устройства управления II. Меченная электродная проволока облучается источником излучения 5. Инфор- .мация о скорости движения электродной проволоки посредством датчика б преобразовывается в электрический сигнал, посту- паю1ций на один из входов светолучево- го осциллографа 7 и фиксируется на све- точувствительной бумаге 8. В фиксированный момент времени устройство управления выдает скачек управляющего воздействия на привод подачи электродной проволоки и, одновременно на второй вход светолуче- вого осциллографа. На светочувствительной бумаге фиксация информации продолжается до нового установившегося значения скорости подачи электродной проволоки. По результатам изменения сигналов на входах каналов I и 2 во времени определяют Дина- мические характеристики канала подачи электродной проволоки, т. е. постоянные времени, коэффициент усиления.
Преимущество предлагаемого способа идентификации динамических характеристик по сравнению с известными способами заключается в более точном учете параметров канала подачи электродной проволоки, так как производится измерение скорости непосредственно электродной (присадочной)
0
5
5 0 5 0 5
0
проволоки и porncTjijiuiH Of и i ic4ii iiiiH но времени.
Предлагаемое устройство 1о:ик)ляст определить динамические .характеристики канала подачи электродной проволоки в соответствии с предлагаемым способом, а имею щиеся аналогичные устройства не обеспечи вают такой возможности
Формула изобретения
. Способ идентификации динамических характеристик канала подачи электродной проволоки, согласно которому информации о скорости определяют по перемещению cei - ментов маски за фиксированный промежуток времени, отлинающийся тем, что, с це,1ьк) повышения качества систем управления путем учета дина.мических х.чрактеристик канала подачи электродной прово. юки при синтезе систем управления процессом дуговой сварки, определение динамических характеристик начинают при постоянном задающем воздействии на привод подачи электродной проволоки и и)И установившейся скорости подачи электродной проволоки производят регистрацию сигналов перемещения сегментов постоянной ц ирины и расположенных через равные интерва.1ы, затем в фиксированный мо.мент времени на привод подачи электродной проволоки выдают скачок управляющего воздействия, при этом регистрацию си Ч1алов перем(мцеиия сегментов производят до нового х становив- шег ося значения скорости подачи элсктро.ь ной проволоки, по :1арегистрированн1 1м.р1 зультатам производят определение пара:иет- ров канала подачи электродной )во.пки.
2. Устройство для идентификспип ли мл мических характеристик кана,|;1 подачи электродной проволоки, содержащее идепп фицируемый канал подачи электродной ii|i()- ВО.1ОКИ, который состоит нл горелки, грикгп и механизма подачи электродной проволоки, датчик скорости, источник из, 1учения, отличающееся тем, что, с целью повышения качества систем управления путем учета дина.мических характеристик Kana. ia подачи электродной проволоки при синтезе систе.м управления, оно снабжено )йство регистрации, устройством управления, датчиком временных интервалов, задающим устройством управляющего воздействия, причем выход датчика скорости соединен с одним и: входов устройства регистрации, второй вход устройства регистрации соединен с датчиком временных интервалов, третий в.ход соединен с устройством управления, которое также соединено с датчиком временных интервалов и механизмом подачи электродной проволоки.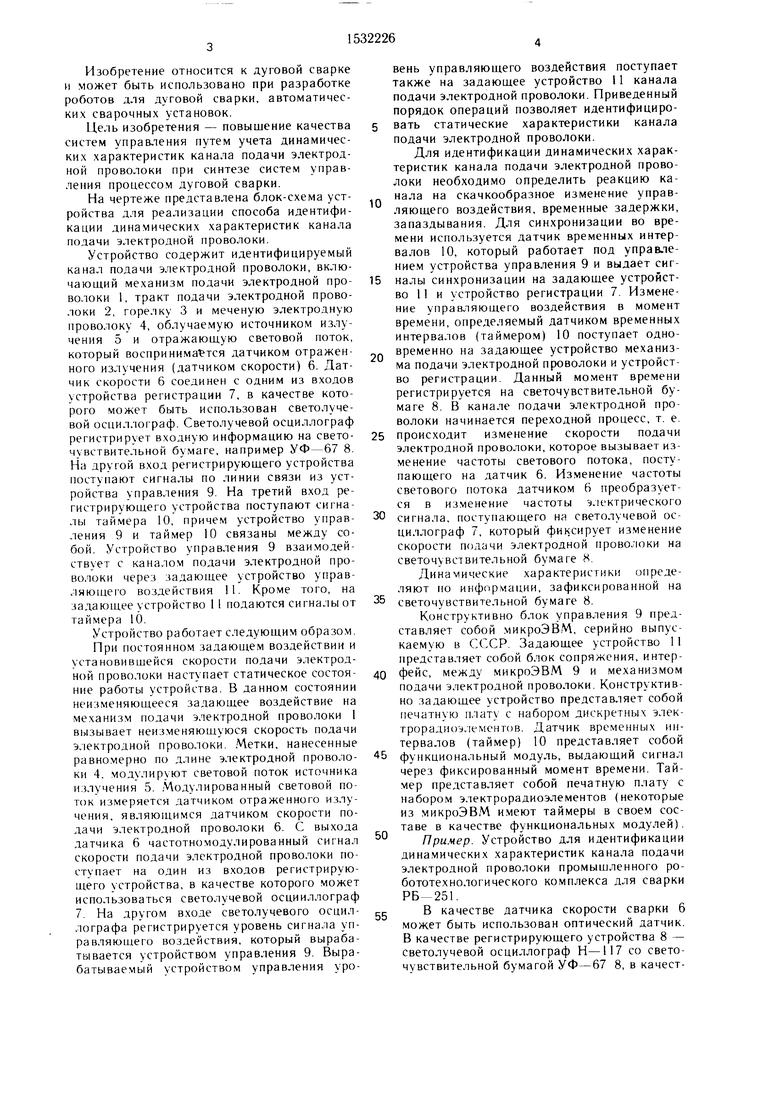
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обеспечения корреляции параметров режима дуговой сварки с геометрическими параметрами шва | 1987 |
|
SU1542728A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1991 |
|
RU2077415C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ С ПОДАЧЕЙ ПРИСАДОЧНОЙ ПРОВОЛОКИ | 1991 |
|
RU2016722C1 |
| Способ автоматического регулирования уровня сварочной ванны | 1988 |
|
SU1523286A1 |
| Способ контроля эффективности газовой защиты при сварке с короткими замыканиями | 1990 |
|
SU1757828A1 |
| Многоканальный светолучевой осциллограф | 1983 |
|
SU1129530A1 |
| Устройство для контроля сварочного процесса | 1982 |
|
SU1031668A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОДУГОВОЙ СВАРКОЙ | 2017 |
|
RU2643025C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
| Способ стабилизации тока при дуговой сварке плавящимся электродом | 1986 |
|
SU1397212A1 |
Изобретение относится к дуговой сварке и может быть использовано при разработке роботов для дуговой сварки, автоматических сварочных установок. Цель изобретения - повышение качества систем управления путем учета динамических характеристик канала подачи электродной проволоки при синтезе систем управления процессом дуговой сварки. Способ основан на измерении скорости непосредственно сварочной проволоки. На проволоку нанесена маска, сегменты которой имеют постоянную ширину и расположены через равные промежутки. Меченая электродная проволока облучается источником излучения. Информация о скорости движения электродной проволоки при помощи датчика преобразовывается в электрический сигнал и фиксируется при помощи осциллографа на светочувствительной бумаге. В фиксированный момент времени устройство управления выдает скачок управляющего воздействия на привод подачи проволоки. Регистрацию сигналов перемещения сегментов производят до нового установившегося значения скорости. По результатам изменения сигналов определяют динамические характеристики канала подачи электродной проволоки. Устройство для реализации способа включает идентифицируемый канал подачи электродной проволоки и состоит из механизма 1 подачи проволоки, тракта 2 подачи проволоки, горелки 3, источника 5 излучения, датчика скорости, осциллографа, используемого в качестве регистратора 7 со светочувствительной бумагой 8, устройства 9 управления и датчика 10 временных интервалов, сигналы которых поступают на осциллограф. Устройство 9 взаимодействует с каналом подачи электродной проволоки через задающее устройство 11 управляющего воздействия. 2 с.п. ф-лы, 2 ил.