12 .1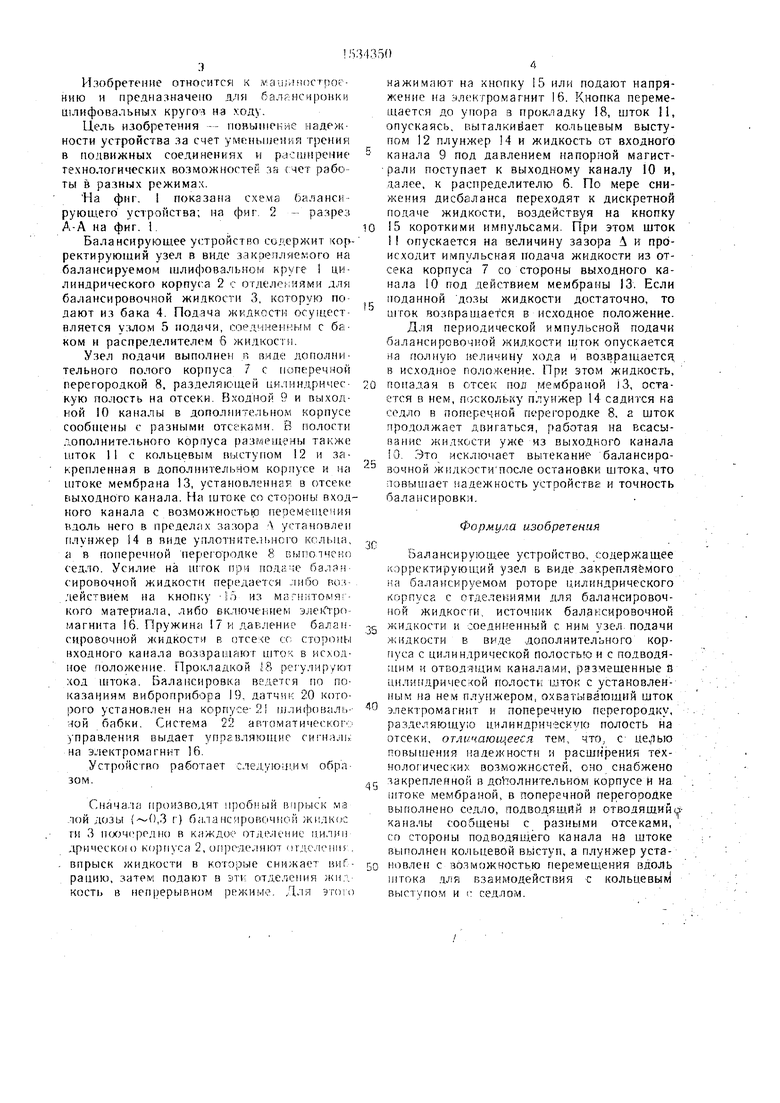
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод модуля промышленного робота | 1986 |
|
SU1349999A1 |
| Пневматический привод | 1988 |
|
SU1596142A1 |
| АКСИАЛЬНО-ПОРШНЕВОЙ НАСОС И ГИДРАВЛИЧЕСКАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА С АКСИАЛЬНО-ПОРШНЕВЫМ НАСОСОМ | 2000 |
|
RU2172428C1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Гидропривод листовых ножниц | 1988 |
|
SU1593797A1 |
| ВЕРТИКАЛЬНЫЙ ШТАМПОВОЧНЫЙ МОЛОТ С ГИДРАВИЛИЧЕСКИМ ПРИВОДОМ | 2014 |
|
RU2574623C1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС | 2013 |
|
RU2521570C1 |
| Система управления колесами транспортного средства | 1990 |
|
SU1787858A1 |
| Рекуперативный гидропривод лесовозного тягача с полуприцепом | 2019 |
|
RU2726987C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2011 |
|
RU2464452C1 |
Изобретение относится к области машиностроения, а именно к гидро- или пневмоприводам промышленных роботов. Целью изобретения является упрощение конструкции и расширение функциональных возможностей. Привод содержит силовой цилиндр 1, распределители 2 и 3, аккумуляторы 4 и 5, обратные клапаны 6 и 7, емкость 8 рабочей среды. Каждая из полостей 9 или 12 силового цилиндра 1 соединена через отдельный трехлинейный распределитель 2 или 3 с соответствующим аккумулятором 4 или 5, каждый из которых дополнительно соединен с источником давления через обратный клапан 6 или 7, установленный с возможностью заполнения аккумуляторов. При этом распределители 2 и 3 выполнены двухпозиционными с возможностью перекрытия магистрали 11 или 14 от аккумулятора 4 или 5 и соединения полости 9 или 12 цилиндра с емкостью 8 рабочей среды в одной позиции и с аккумулятором 4 или 5 в другой позиции. 1 ил.
/J
сп
со
4ъ
to
СП
Итобретенне относится к машиностроению и может быть использовано в промышленных роботах с гидро- и пневмоприводами .
Цель изобретения - упрощение конструкции и расширение функциональных возможностей привода модуля промышленного робота.
На чертеже показан привод модуля промышленного робота.
Привод модуля промышленного робота содержит силовой цилиндр 1, распределители 2 и 3, аккумуляторы 4 и 5, обратные клапаны 6 и 7 и емкость
8рабочей среды. К штоковой полости
9цилиндра 1 через трубопроводы 10 и 11 и через распределитель 2 подсоединен аккумулятор 4, а к поршневой полости 12 через трубопроводы 13 и 14 и через распределитель 3 подсоединен аккумулятор 5. С источником давления через трубопровод 15 и обратный клапан 6 соединен аккумулятор 4, а через обратный клапан 7 - аккумуля- тор 5. Распределители 2 и 3 выполнены трехлинейными двухпозициониыми с пружинным возвратом.
Привод модуля промышленного робота работает следующим образом.
В исходном положении распределител 2 и 3 находятся в позиции, показанной на схеме, перекрывая магистрали 11 и 14 от аккумуляторов 4 и 5, соединяя полости 9 и 12 цилиндра 1 с ем- костью 8 рабочей среды. Поршень силового цилиндра 1 неподвижен, а один из аккумуляторов, например аккумулятор 5, заряжен при предыдущем торможении привода исполнительного органа. Для движения поршня со штоком цилиндра 1, например, влево подается сигнал на распределитель 3, который переключается и соединяет полость 12 цилиндра 1 с аккумулятором 5, разъеди нив ее с емкостью 8. Рабочая среда из аккумулятора 5 через трубопроводы 13 и 14 и через распределитель 3 поступает в поршневую полость 12 цилиндра 1. Поршень и соединенный с ним шток начинают движение влево, при этом преодоление инерции покоя и разгон происходят за счет давления рабочей среды из аккумулятора 5 до тех пор, пока это давление не окажется равным
$ Q
0
давлению в напорной магистрали 15. Дальнейшее движение поршня происходит за счет поступления рабочей среды из напорной магистрали 15 источника давления через обратный клапан 7, трубопроводы 14 и 13 и распределитель 3 в поршневую полость 12 цилиндра 1. Рабочая среда из штоковой полости 9 вытесняется через трубопровод 10 и распределитель 2 в емкость 8. При установившемся движении энергия затрачивается на преодоление сил трения. Для торможения и остановки исполнительного органа подается сигнал на распределитель 2. Поршень цилиндра 1 и исполнительный орган продолжают движение влево под действием сил инерции и давления в полости 12. Рабочая среда из штоковой полости 9 вытесняется через трубопроводы 10 и 11 и распределитель 2 в аккумулятор 4, заряжая его. Увеличение давления в штоковой полости 9 приводит к остановке поршня. В конце хода поршня снимается сигнал с распределителя 2, он становится в позицию, показанную на схеме, соединяя полость 9 с емкостью 8, и перекрывает аккумулятор 4 с накопленной энергией. Для движения поршня вправо сигнал подается на распределитель 2, а с распределителя 3 снимается.
Формула изобретения Привод модуля промышленного робота, содержащий силовой цилиндр, распределитель, аккумуляторы, обратные клапаны, емкость рабочей среды и источник питания, отличающий- с я тем, что, с целью упрощения конструкции и расширения функциональных возможностей, он снабжен дополнительным распределителем, распределители выполнены двухпозиционными трехлинейными с пружинным возвратом, каждый из которых подключен своим выходом к соответствующей полости цилиндра, а первыми входами сообщены между собой и с емкостью, вторыми подключены к соответствующему аккумулятору и выхо ду обратного клапана, входы которых сообщены с.источником питания, при этом в исходном положении распределителя его выход соединен с первым входом, а в рабочем - с вторым.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
