/ .5
4S
27 4
Х
- J
41
СП
со
а
4:; tsD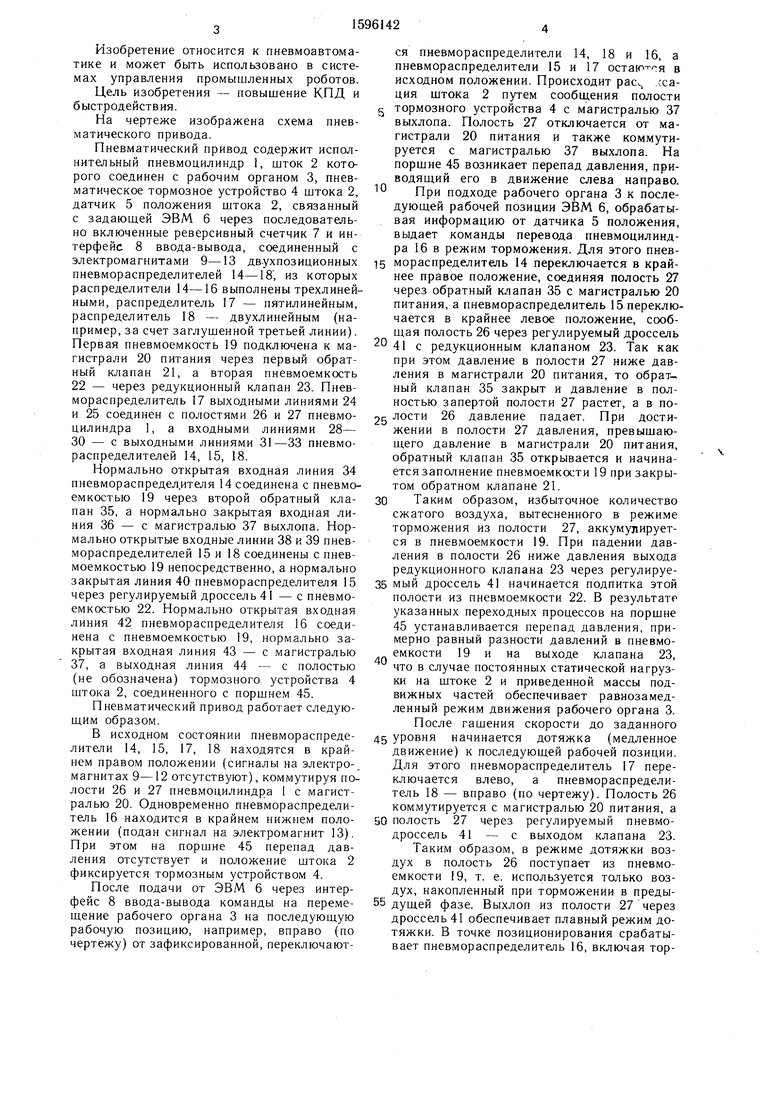
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмопривод | 1988 |
|
SU1583670A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Позиционный пневмопривод | 1989 |
|
SU1642100A1 |
| Пневмопривод | 1989 |
|
SU1597452A1 |
| Пневмопривод | 1989 |
|
SU1665114A1 |
| Гидропневматический усилитель привода управления сцеплением транспортного средства | 1989 |
|
SU1765037A1 |
| Дозатор сыпучих материалов | 1990 |
|
SU1760363A1 |
| Пневмопривод | 1989 |
|
SU1663248A1 |
| Адаптивный пневматический привод с обратной пневматической связью | 2018 |
|
RU2685167C1 |
| Кран-манипулятор | 1984 |
|
SU1278293A1 |
Изобретение относится к области пневмоавтоматики и может быть использовано в системах управления промышленных роботов. Целью изобретения является повышение КПД и быстродействия. После подачи от ЭВМ 6 команды на перемещение рабочего органа 3 переключаются пневмораспределители 14, 16, 18, а пневмораспределители 15, 17 остаются в исходном положении. Происходит расфиксация штока 2 пневмоцилиндра 1, а его полость 27 отключается от магистрали 20 и соединяется с магистралью 37. При подходе штока 2 к следующей рабочей позиции пневмоцилиндр 1 переводится в режим торможения, для чего пневмораспределитель 14 переключается вправо. При достижении в полости 27 давления, превышающего давление в магистрали 20, клапан 35 запирается и начинается заполнение пневмоемкости 19. Когда давление в полости 26 упадет ниже давления на выходе клапана 23, через дроссель 41 происходит подпитка из пневмоемкости 22. После гашения скорости осуществляется дотяжка (медленное движение) к последующей позиции. В этом режиме воздуха в полость 26 поступает из пневмоемкости 19. 1 ил.
10
Y
Ф
Изобретение относится к пневмоавтоматике и может быть использовано в системах управления промышленных роботов.
Цель изобретения - повышение КПД и быстродействия.
На чертеже изображена схема пневматического привода.
Пневматический привод содержит исполнительный пневмоцилиндр 1, шток 2 которого соединен с рабочим органом 3, пневматическое тормозное устройство 4 штока 2, датчик 5 положения штока 2, связанный с задаюшей ЭВМ 6 через последовательно включенные реверсивный счетчик 7 и интерфейс 8 ввода-вывода, соединенный с электромагнитами 9-13 двухпозиционных пневмораспределителей 14-18, из которых распределители 14-16 выполнены трехлинейными, распределитель 17 - пятилинейным, распределитель 18 - двухлинейным (например, за счет заглушенной третьей линии). Первая пневмоемкость 19 подключена к магистрали 20 питания через первый обратный клапан 21, а вторая пневмоемкость 22 - через редукционный клапан 23. Пнев- мораспределитель 17 выходными линиями 24 и 25 соединен с полостями 26 и 27 пневмо- цилиндра 1, а входными линиями 28- 30 - с выходными линиями 31-33 пневмораспределителей 14, 15, 18.
Нормально открытая входная линия 34 пневмораспредел.ителя 14 соединена с пневмо- емкостью 19 через второй обратный клапан 35, а нормально закрытая входная линия 36 - с магистралью 37 выхлопа. Нормально открытые входные линии 38 и 39 пневмораспределителей 15 и 18 соединены с пнев- моемкостью 19 непосредственно, а нормально закрытая линия 40 пневмораспределителя 15 через регулируемый дроссель 41 - с пневмо- емкостью 22. Нормально открытая входная линия 42 пневмораспределителя 16 соединена с пневмоемкостью 19, нормально закрытая входная линия 43 - с магистралью 37, а выходная линия 44 - с полостью (не обозначена) тормозного устройства 4 штока 2, соединенного с поршнем 45.
Пневматический привод работает следую- шим образом.
В исходном состоянии пневмораспреде- лители 14, 15, 17, 18 находятся в крайнем правом положении (сигналы на электро- магнитах 9-12 отсутствуют), коммутируя полости 26 и 27 пневмоцилиндра 1 с магистралью 20. Одновременно пневмораспредели- тель 16 находится в крайнем нижнем положении (подан сигнал на электромагнит 13). При этом на поршне 45 перепад давления отсутствует и положение штока 2 фиксируется тормозным устройством 4.
После подачи от ЭВМ 6 через интерфейс 8 ввода-вывода команды на переме- шение рабочего органа 3 на последуюш,ую рабочую позицию, например, вправо (по чертежу) от зафиксированной, переключаются пневмораспределители 14, 18 и 16, а пневмораспределители 15 и 17 остаит пя в исходном положении. Происходит рас, сса- ция штока 2 путем сообщения полости
тормозного устройства 4 с магистралью 37 выхлопа. Полость 27 отключается от магистрали 20 питания и также коммутируется с магистралью 37 выхлопа. На поршне 45 возникает перепад давления, при- водяш,ий его в движение слева направо.
При подходе рабочего органа 3 к последующей рабочей позиции ЭВМ 6, обрабатывая информацию от датчика 5 положения, выдает команды перевода пневмоцилиндра 16 в режим торможения. Для этого пнев5 мораспределитель 14 переключается в крайнее правое положение, соединяя полость 27 через обратный клапан 35 с магистралью 20 питания, а пневмораспределитель 15 переключается в крайнее левое положение, сообщая полость 26 через регулируемый дроссель
0 41 с редукционным клапаном 23. Так как при этом давление в полости 27 ниже давления в магистрали 20 питания, то обрат.-, ный клапан 35 закрыт и давление в полностью запертой полости 27 растет, а в по5 лости 26 давление падает. При достижении в полости 27 давления, превышающего давление в магистрали 20 питания, обратный клапан 35 открывается и начинается заполнение пневмоемкости 19 при закрытом обратном клапане 21.
0 Таким образом, избыточное количество сжатого воздуха, вытесненного в режиме торможения из полости 27, аккумулируется в пневмоемкости 19. При падении давления в полости 26 ниже давления выхода редукционного клапана 23 через регулируе5 мый дроссель 41 начинается подпитка этой полости из пневмоемкости 22. В результате указанных переходных процессов на поршне 45 устанавливается перепад давления, примерно равный разности давлений в пневмо- емкости 19 и на выходе клапана 23, что в случае постоянных статической нагрузки на штоке 2 и приведенной массы подвижных частей обеспечивает равнозамед- ленный режим движения рабочего органа 3. После гашения скорости до заданного
5 уровня начинается дотяжка (медленное движение) к последующей рабочей позиции. Для этого пневмораспределитель 17 переключается влево, а пневмораспределитель 18 - вправо (по чертежу). Полость 26 коммутируется с магистралью 20 питания, а
0 полость 27 через регулируемый пневмо- дроссель 41 - с выходом клапана 23. Таким образом, в режиме дотяжки воздух в полость 26 поступает из пневмоемкости 19, т. е. используется только воздух, накопленный при торможении в преды5 дущей фазе. Выхлоп из полости 27 через дроссель 41 обеспечивает плавный режим до- тяжки. В точке позиционирования срабатывает пневмораспределитель 16, включая торУиозное устройство 4. Одновременно пневмо- распределители 14, 15, 17, 18 пepeвoдяtcя в исходное положение.
Формула изобретения
Пневматический привод, содержащий ис- полните.1ьный пневмоцилиндр, шток которого соединен с рабочим органом, пневматическое тормозное устройство штока, датчик положения штока, связанный с задаюш.ей ЭВМ через последовательно включенные реверсивный счетчик и интерфейс ввода- вывода, соединенный с электромагнитами двухпозиционных пневмораспределителей, по меньшей мере три из которых выполнены трехлинейными, связанных с магистралями питания и выхлопа, а также с полостями пневмоцилиндра и пневматического тормозного устройства, отличающийся тем, что, с целью повышения КПД и быстродействия, он снабжен двумя обратными клапанами, регулируемыми дросселем, редукционным
клапаном и двумя пневмоемкостями, первая пневмоемкость подключена к магистрали питания через первый обратный клапан, а вторая пневмоемкость - через редукцион- 5 ный клапан, один из пневмораспределителей выполнен двухлинейным и один пятилинейным, при этом последний выходными линиями соединен с полостями пневмоцилиндра, а входными - с выходными линиями
Q двух трехлинейных и двухлинейного пневмораспределителей, нормально открытая входная линия одного трехлинейного пнев- мораспределителя соединена с первой пнев- моемкостью через второй обратный клапан, а нормально закрытая входная линия - с
5 магистралью выхлопа, нормально открытые входные линии двухлинейного и другого трехлинейного пневмораспределителя соединены с первой пневмоемкостью, а нормально закрытая входная линия последнего, через регулируемый дроссель - с второй
0
пневмоемкостью.
| Механизация и автоматизация производства, М.: Машиностроение, 1986, № 12, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
