Изобретение относится к области машинотроения и может быть использовано в проышленных роботах с гидравлическим или невматическим приводом.
Цель изобретения - повышение быстроействия и надежности.
На чертеже показана схема привода.
Устройство содержит привод поступателього движения, выполненный в виде силоого цилиндра 1 и привод враплательного вижения, выполненный например, в виде поворотного гидро- или пневмодвигателя 2, расределитель 3, первые обратные клапаны 4 и , емкость 6 рабочей среды, вторые обратные клапаны 7 и 8, аккумуляторы 9 и 10, треьи обратные клапаны 11 и 12. Распределиель выполнен трехнозиционным, соединен с е.мкостью 6 рабочей среды и через четвертый обратный клапан 13 -- с источником давления рабочей среды. Распределитель 3,управяется, например, с помощью электромагнитов, обмотки которых соединены с контактами програм.много устройства или путевых включателей (не показаны).
Привод модуля про.мь шленного робота работает следующим образом.
В исходном положении золотник распределителя 3 занимает нейтральное положение, перекрывая все .магистрали. Пор- HjeHb силового цилиндра 1 неподвижен, а один из акку.муляторов, например аккумулятор 10, заряжен при предыдущем торможении исполнительного органа.
Для движения исполнительного органа, например, впр аво подается команда от програм.много устройства или конечного включателя на обмотку соответствующего электромагнита и золотник из нейтрального положения перемещается вправо, соединяя поршневую полость силового цилиндра 1 с емкостью 6, а щтоковую полость - с напорной линией источника давления через обратный клапан 13 и с аккумулятором 10 через обратный клапан 12. Порщень и соединенный с ним через шток исполнительный орган начинают движение вправо, при это.м преодоление инерции покоя и разгон происходят за счет давления рабочей среды из акку.мулятора 10, поступающей через обратный клапан 12 в щтоковую полость до тех пор пока это давление не окажется равным давлению в напорной линии.
Дальнейшее движение поршня происходит за счет поступления рабочей среды из напорной линии источника давления через обратный клапан 13. Рабочая среда из поршневой полости вытесняется через распределитель 3 в емкость 6. При установившемся движении энергии затрачивается на преодоление сил трения. Для остановки исполнительного органа программным устройством или конечны.м включателем подается команда на обмотку электромагнита, под действием которого золотник распределителя 3 занимает нейтральное положение, изображенное на чертеже, и перекрывает все магистрали. nopHjeHb и исполнительный орган продолжают движение вправо под действием сил инерции. Во время этого движения штоковая полость силового цилиндра I заполняется рабочей средой из емкости 6 через обратный клапан 5, а рабочая среда из порщневой полости вытесняется через обратный клапан 7 в аккумулятор 9,заряжая его. В результате сжатия упругого элемента аккумулятора 9 (газа или пружины) увеличивается давление в поршневой полости и соответственно сопротивление перемещению поршня, что приводит к остановке порщня и связанного с ним исполнительного
органа.
При подаче команды на движение исполнительного органа влево золотник распределителя 3 перемещается влево и соединяет ц токовую полость силового цилиндра 1 с е.мкостью б, а поршневую полость - с напорной линией источника давления через обратный клапан 13 и с аккумулятором 9 через обратный клапан 1 1. Теперь поршень и исполнительный орган разгоняются за счет использования потенциальной энергии, запасенной
в аккумуляторе 9. Рабочая среда из аккумулятора 9 поступает через обратный клапан I 1 в порщневую полость силового цилиндра 1 до тех пор, пока не сравняется давление в аккумуляторе 9 и в напорной линии. Дальнейшее движение исполнительного органа происходит за счет рабочей среды поступающей из напорной линии источника давления. Рабочая среда из штоко- вой полости вытесняется через распределитель в емкость 6.
Остановка исполнительного органа производится путем подачи соответствующей команды, в результате которой золотник распределителя 3 возвращается в нейтральное положение и перекрывает все магистрали. Поршень и исполнительный орган, продолжая движение под действием сил инерции,
вытесняют рабочую среду из штоковой полости через обратный клапан 8 в аккумулятор 10, заряжая его до определенной величины давления, и останавливаются, пройдя определенный путь после подачи команды торможения. Путь и вре.мя торможения задаются соответствующим отношением площади сечения полостей силового цилиндра и емкости акку.мулято юв с учето.м допустимых ускорений разгона и торможения исполнительного органа, оггределяющих величину сил инерции.
Переналадка привода, например, в связи с изменение.м .массы пере.мещае.мого роботом объекта, производится путем соответствующего изменения момента подачи команды торможения (перемещение путевых
включателей), что увеличивает или уменьшает в зависимости от необходи.мости путь торможения и обеспечивает остановку исполнительного органа в заданном положении, Аналогичным образом работает и привод
вращательного движения, у которого вместо поршневой и штоковой полостей могут быть две одинаковые полости поворотного двигателя.
Формула изобретения
Привод модуля промышленного робота, содержащий силовой цилиндр, соединенный магистралями с управляемым распределителем, который связан с источником давления рабочей среды, отличающийся тем, что, с целью повышения быстродействия и надежности, он снабжен двумя аккумуляторами, емкостью рабочей среды и обратными клапанами, причем каждая из полостей силового цилиндра соединена одной магистралью с емкостью рабочей среды через первый обратный клапан, установленный с возможностью заполнения полости, а второй магистралью
соединена с соответствующим аккумулятором через второй обратный клапан, установленный с возможностью заполнения аккумулятора, при этом каждый из аккумуляторов соединен с управляемым распределителем через третий обратный клапан, установленный с возможностью истечения рабочей среды из аккумулятора, управляемый распределитель выполнен трехпозиционным с
возможностью перекрытия всех соединенных с ним магистралей в нейтральном положении, а в двух других положениях - с возможностью попеременного соединения одной полости силового цилиндра с соответствующим аккумулятором и с источником давления рабочей среды через четвертый обратный клапан, установленный с возможностью истечения рабочей среды из этого источника, а другой полости - с емкостью рабочей среды.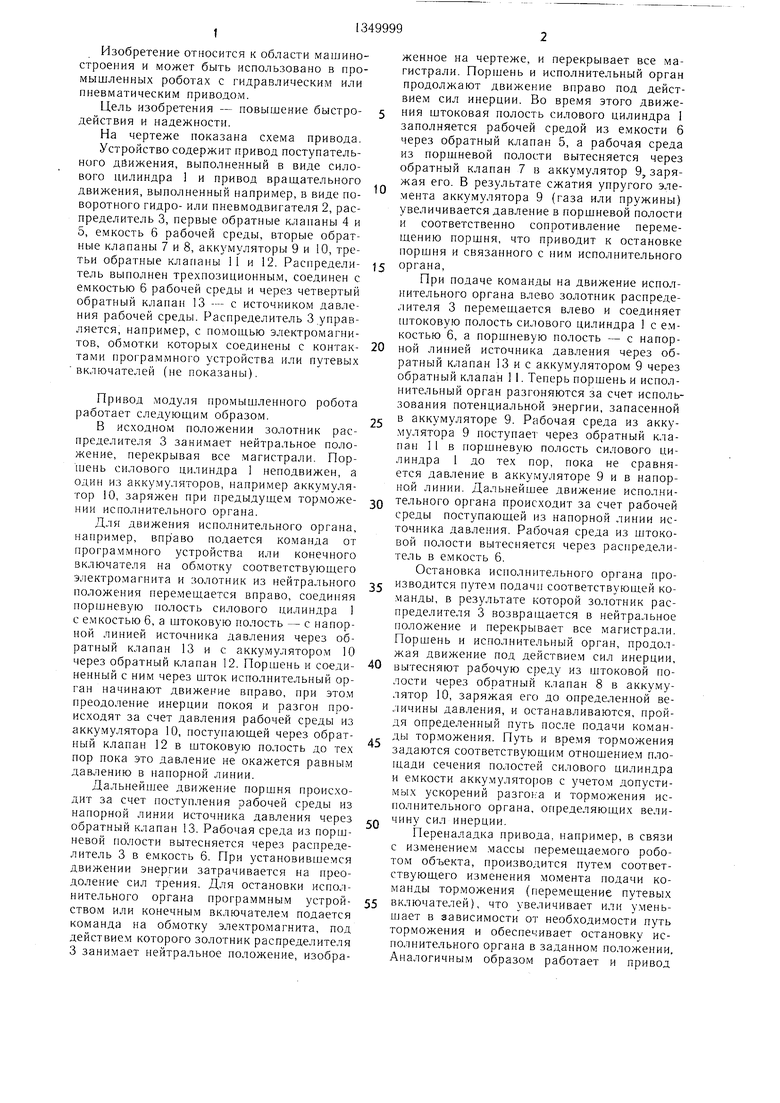
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод модуля промышленного робота | 1988 |
|
SU1534215A1 |
| Гидравлический привод с рекуперацией энергии торможения | 1978 |
|
SU738920A1 |
| Гидропривод штамповочного молота | 1977 |
|
SU660767A1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| Привод гидравлического пресса | 1983 |
|
SU1147597A1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| Пневмогидравлический привод | 1979 |
|
SU821759A1 |
| Гидравлическая активная тормозная система колесного транспортного средства | 1990 |
|
SU1740216A1 |
| Гидрообъемная трансмиссия транспортного средства с рекуперативным приводом | 1978 |
|
SU779105A1 |
| Гидравлическое устройство для рекуперации энергии торможения транспортного средства | 1986 |
|
SU1357259A1 |
Изобретение относится к области машиностроения и может быть использовано в промышленных роботах с гидро- или пневмоприводами. Цель изобретения состоит в повышении быстродействия и надежности. Устройство содержит силовой ци72 линдр I, соединенный магистралями с управляемым распределителем 3, который выполнен трехпозиционным и связан с источником давления рабочей среды через обратный клапан 13, с емкостью 6 рабочей среды и через обратные клапаны 7 и 8 с аккумуляторами 9 и 10 соответственно. Кроме того, полости силового цилиндра сообшены через обратные клапаны 4 и 5 с емкостью 6рабочей среды и через обратные клапаны 7и 8 с аккумуляторами-9 и 10. При торможении связанного с силовым цилиндром 1 исполнительного органа и соответственно перемещаемого объекта их кинетическая энергия преобразуется в потенциальную энергию, запасаемую в аккумуляторах 9 и 10, которая затем используется для преодоления сил инерции при разгоне исполнительного органа в обратном направлении. 1 ил. о (Л со 4: ;о со х со
| Привод модуля промышленного робота | 1980 |
|
SU960005A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
