Изобретение-относится к электрическим микромашинам и может быть использовано в системах автоматики в качестве датчика угла, датчика фазы пибо в качестве датчика положения ротора в бесконтактных двигателях постоянного тока.
Целью изобретения является повышение точности отработки функциональной зависимости бесконтактного многоканального датчика угла.
На фиг. 1 изображен датчик, поперечный разрез; на фиг. 2 - то ме, продольный разрез.
Датчик содержит корпус 1 из немагнитного материала, в котором жестко закреплен магнитопровод статора 2, в пазах которого расположены обмотки 3 возбуждения и выходные обмотки 4 одного из каналов. Ъ нейтральном отверстии корпуса 1 установлена с возможностью поворота и последующей фиксацией винтом 5 втулка 6, на которую концентрично с магнитопроводом статора 2 первого канала напрессован магнитопровод статора 7 второго канала, в пазы которого уложены обмотки 8 возбуждения и выходные обмотки 9.Концентрично с магнитопроводами статоров 2 и 7 каналов расположен безобмоточный ротор Л 0, жестко закрепленный на входной оси. Внутренний фланец ротора 10 является опорной поверхностью подшипника 11, запрессованного во втулку 6. По внешнему диаметру ротора 10 выполнена многополюсная зубцовая зона 12, образующая рабочий воздушный зазор с магнитопроводом статора 2 первого канала, а по внутреннему диаметру - зубцовая зона 3, образующая рабочий воздушный зазор с магнитопроводом статора 7. Длина воздушного зазора в зубцовой зоне 12 для обесаечения одинакового коэффициента трансформации каналов должна быть связана с длиной воздушного зазора в зубцовой зоне 13 следующим соотношением:
г кк-|-;- .
где Кк - конструктивный коэффициент, определяемый выражением
v - vWl Кгр«Гу Г I.
1
TPi
Wn HW, - число витков в обмотках 4
и 9; I, и 1 - токи в обмотках 4 и 9;
5
0
5
0
5
0
5
KTpt ,
Кт- коэффициент трансформации,
Р, иР - число пар полюсов зубцовых
зон 12 и 13;
tf, и с/а длины воздушных зазоров зубцов ых зон 12 и 13.
При этом, если в пазы статора уложить обмотки с различными числами полюсов, то можно получить многоканальный вращающийся трансформатор.
Согласование нулевых точек каналов производится путем поворота втулки 6 с закрепленным на ней статором 7 грубого канала и последующей жесткой фиксацией ее в корпусе J винтом 5.
Датчик угла в необходимых случаях может быть выполнен в бескорпусном варианте, что очень важно при использовании его в системах, где требуется минимальный вес и размеры.
При повороте ротора 10 относительно статоров 2 и 7 происходит изменение магнитного сопротивления рабочих воздушных зазоров каналов в функции числа зубцов ротора 10 и числа пар полюсов обмоток, что приводит к изменению ЭДС выходных обмоток в функции угла поворота. Повышение точности достигнуто путем уменьшения гармоник рассеяния каналов. Формула изобретения
Бесконтактный многоканальный датчик угла, содержащий обмотки возбуждения,, дв а ко аксиально установленных статора с выводными обмотками и расположенный между ними цилиндрический ротор с зубцовыми зонами на его внешней и внутренней поверхностях, отличающийся тем, что, с целью повышения точности, ротор выполнен беэобмоточным, обмотки возбуждения установлены на статорах, а зазоры между статорами S/ и внутренней и внешней поверхностями ротора fit определены уравнением
Л- ,
где К
К
W
Ii
тр w, i4 ктрг
КтР, и
К- коэффициенты трансформации
каналов;
W, HW.J - числа витков вторичных обмоток каналов;
11 и.г - токи выходных обмоток каналов ;
pt числа пар полюсов каналов.
Ж Я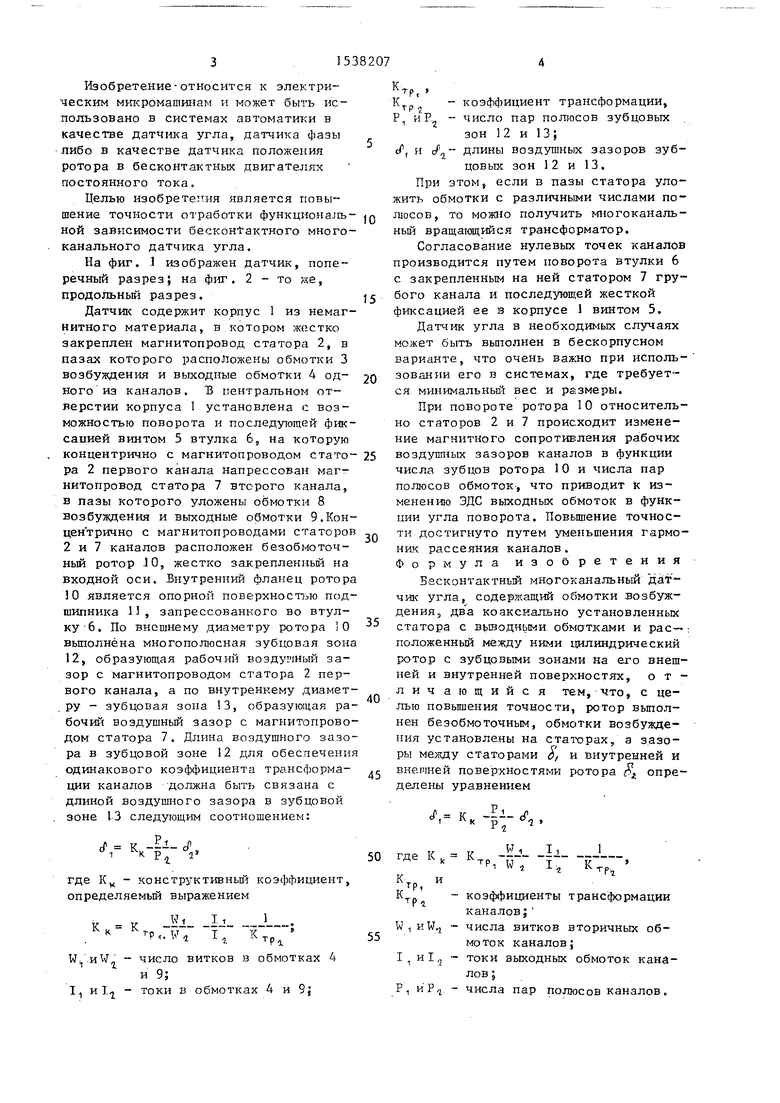
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухфазный двоичный датчик угла | 1978 |
|
SU758411A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 2007 |
|
RU2423272C2 |
| Бесконтактный вращающийся трансформатор | 1972 |
|
SU501452A1 |
| Двухотсчетный вращающийся трансформатор | 1986 |
|
SU1365271A1 |
| Дифференциальный индукционный датчик углового положения и частоты вращения | 1990 |
|
SU1796891A1 |
| Вращающийся трансформатор | 1977 |
|
SU736284A1 |
| Многополюсный вращающийся трансформатор | 1984 |
|
SU1210185A1 |
| Двухотсчетный вращающийся трансформатор | 1984 |
|
SU1234927A1 |
| Сдвоенный вращающийся трансформатор | 1982 |
|
SU1171914A1 |
| Бесконтактный преобразователь угла | 1976 |
|
SU571857A1 |
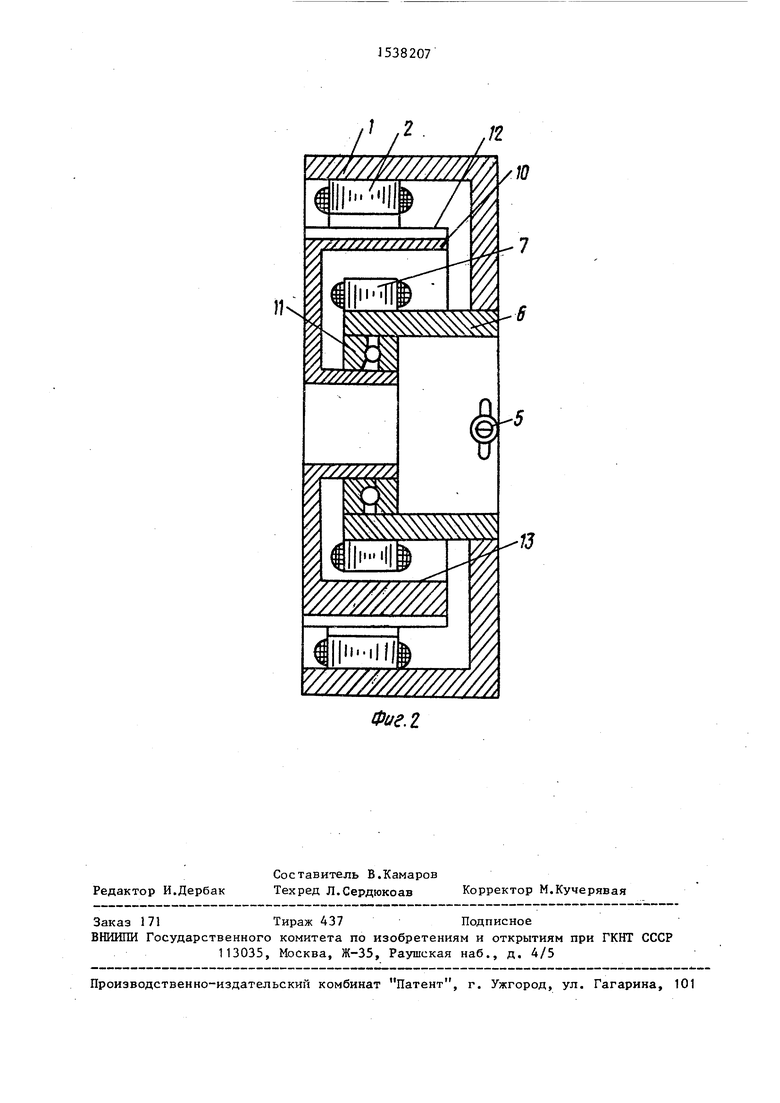
Изобретение относится к электрическим информационным микромашинам и может быть использовано в системах автоматики и вычислительной техники в качестве датчика угла фазы, ибо датчика положения ротора. Цель изобретения - повышение точности отработки функциональной зависимости. Датчик угла содержит два концентрично расположенных статора 2, 7 и безобмоточный ротор 10, по наружному диаметру которого образована первая зубцовая зона 12, а по внутреннему диаметру - вторая зубцовая зона 13. При этом длины воздушных зазоров в зубцовых зонах имеют определенную зависимость. Данная конструкция способствует уменьшению гармоник рассеяния каналов, что повышает точность преобразования. 2 ил.
VP&
п..,11)
V//////////////;
i
tf
Фе/е.2
| Ахметжаков А.А | |||
| и Лукиных Н.В | |||
| Индукционный редуктосин | |||
| - М.: Энергия, 1971, с | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Плоский двухканальный датчик угла | 1981 |
|
SU989692A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
