этого происходит перемещение его подвижного элемента 16, защелка 18 которого смещает вправо стопорную обойму 9s выводя ее наружный зубчатый венец 10 из зацепления с внутренним зубчатым венцом 8 эксцентриковой втулки 7 и колесо 13 из зацепления с шестерней 14, Одновременно подвижный элемент 16 поворачивает рычаг
20
5 который перемещает влево палец
21. Последний входит в паз 23 шатуна
6,стопоря его относительно станины 1. Затем от электродвигателя 28 происходит разворот эксцентрикового блока 3 и эксцентриковой втулки
7.При этом изменяется их суммарный эксцентриситет, т.е. ход ползуна при неизменном положении вала 12 коман- доаппарата, а следовательно, средств механизации. 2 ил.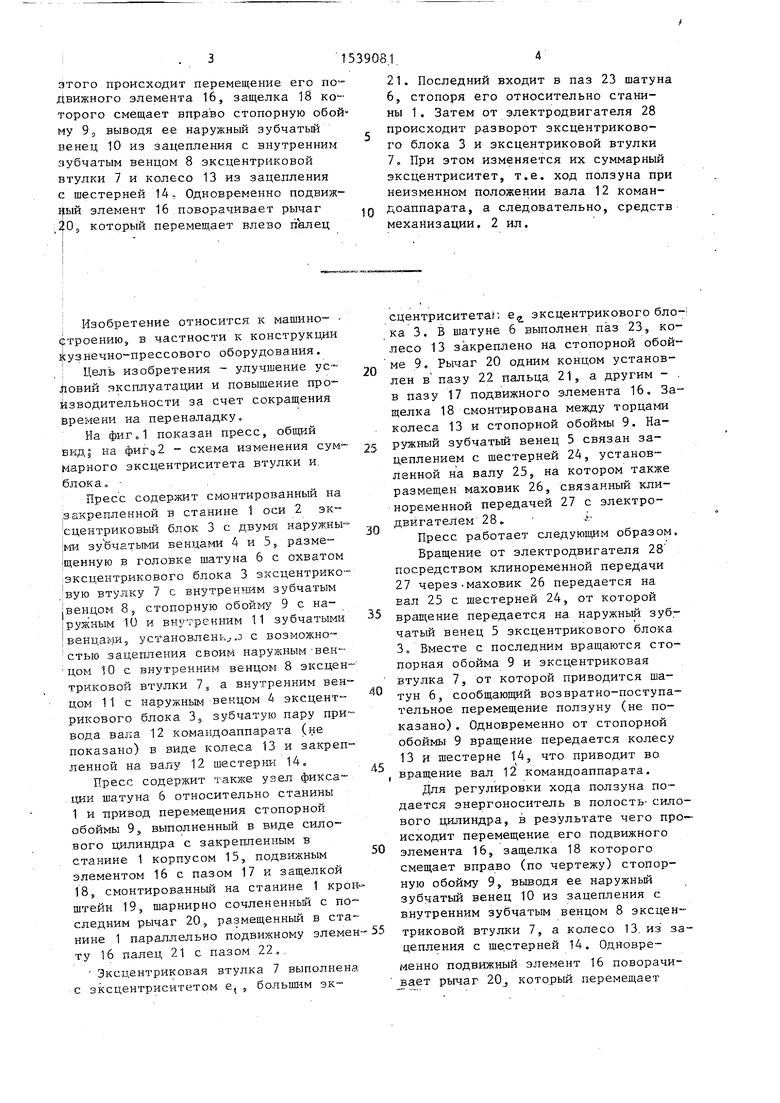

| название | год | авторы | номер документа |
|---|---|---|---|
| Механический пресс | 1980 |
|
SU872309A1 |
| Устройство для регулирования хода ползуна кривошипного пресса | 1987 |
|
SU1445984A1 |
| Механический пресс | 1987 |
|
SU1497049A1 |
| МЕХАНИЗМ РЕГУЛИРОВКИ ХОДА ПОЛЗУНА КРИВОШИПНОГО ПРЕССА | 2002 |
|
RU2223862C2 |
| Кривошипно-коленный пресс | 1986 |
|
SU1390069A1 |
| МЕХАНИЧЕСКИЙ ПРЕСС | 1971 |
|
SU301285A1 |
| Устройство для регулирования величины хода ползуна кривошипного пресса | 1988 |
|
SU1532303A1 |
| Механический пресс | 1986 |
|
SU1412993A1 |
| Устройство для регулирования хода ползуна кривошипного пресса | 1989 |
|
SU1666359A1 |
| Кривошипный пресс | 1985 |
|
SU1355498A1 |

Изобретение относится к кузнечно-прессовому оборудованию, в частности к конструкции механических прессов. Цель изобретения - улучшение условий эксплуатации и повышение производительности прессов за счет сокращения времени на переналадку. Для регулировки хода ползуна подается энергоноситель в штоковую полость силового цилиндра 15. В результате этого происходит перемещение его подвижного элемента 16, защелка 18 которого смещает вправо стопорную обойму 9, выводя ее наружный зубчатый венец 10 из зацепления с внутренним зубчатым венцом 8 эксцентриковой втулки 7 и колесо 13 из зацепления с шестерней 14. Одновременно подвижный элемент 16 поворачивает рычаг 20, который перемещает влево палец 21. Последний входит в паз 23 шатуна 6, стопоря его относительно станины 1. Затем от электродвигателя 28 происходит разворот эксцентрикового блока 3 и эксцентриковой втулки 7. При это изменяется их суммарный эксцентриситет, то есть ход ползуна при неизменном положении вала 12 командоаппарата и, следовательно, средств механизации. 2 ил.
Изобретение относится к машиностроению, в частности к конструкции кузнечно-прессового оборудования.
Цель изобретения - улучшение условий -эксплуатации и повышение производительности за счет сокращения времени на переналадку.
На фиг.1 показан пресс, общий вид; на фиг02 - схема изменения суммарного эксцентриситета втулки и блока.
Пресс содержит смонтированный на закрепленной в станине 1 оси 2 эксцентриковый блок 3 с двумя наружными зу бчатыми венцами А и 5, размещенную в головке шатуна 6 с охватом эксцентрикового блока 3 эксцентриковую втулку 7 с внутренним зубчатым венцом 8, стопорную обойму 9 с наружным 10 и внутренним 11 зубчатыми венца ш, установленного с возможностью зацепления своим наружным венцом 10 с внутренним венцом 8 эксцентриковой втулки 7, а внутренним венцом 11 с наружным венцом 4 эксцентрикового блока Зэ зубчатую пару привода вала 12 командоаппарата (не показано) в виде колеса 13 и закрепленной на валу 12 шестерни 14.
Пресс содержит также узел фиксации шатуна 6 относительно станины 1 и привод перемещения стопорной обоймы 9, выполненный в виде силового цилиндра с закрепленным в станине 1 корпусом 15, подвижным элементом 16 с пазом 17 и защелкой 18, смонтированный на станине 1 крон штейн 19, шарнирно сочлененяьй с последним рычаг 20, размещенный в станине 1 параллельно подвижному элемен ту 16 палец 21 с пазом 22.
Эксцентриковая втулка 7 выполнена с эксцентриситетом е, , большим эк20
25
30
35
40
45
50
55
сцентриситетаг. ег эксцентрикового блока 3. В шатуне 6 выполнен паз 23, колесо 13 закреплено на стопорной обойме 9. Рычаг 20 одним концом установлен в пазу 22 пальца 21, а другим - в пазу 17 подвижного элемента 16. Защелка 18 смонтирована между торцами колеса 13 и стопорной обоймы 9. Наружный зубчатый венец 5 связан зацеплением с шестерней 24, установленной на валу 25, на котором также размещен маховик 26, связанный кли- ноременной передачей 27 с электродвигателем 28,
Пресс работает следующим образом.
Вращение от электродвигателя 28 посредством клиноременной передачи 27 через-маховик 26 передается на вал 25 с шестерней 24, от которой вращение передается на наружный зубчатый венец 5 эксцентрикового блока 3. Вместе с последним вращаются стопорная обойма 9 и эксцентриковая втулка 7, от которой приводится шатун 6, сообщающий возвратно-поступательное перемещение ползуну (не показано) . Одновременно от стопорной обоймы 9 вращение передается колесу 13 и шестерне 14, что приводит во вращение вал 12 командоаппарата.
Для регулировки хода ползуна подается энергоноситель в полость силового цилиндра, в результате чего происходит перемещение его подвижного элемента 16, защелка 18 которого смещает вправо (по чертежу) стопорную обойму 9, выводя ее наружный зубчатый венец 10 из зацепления с внутренним зубчатым венцом 8 эксцентриковой втулки 7, а колесо 13 из зацепления с шестерней 14. Одновременно подвижный элемент 16 поворачивает рычаг 203 который перемещает
влево (по чертежу) палец 21. Последний входит в паз 23 шатуна 6, стопора его относительно станины 1.
Затем от электродвигателя 28 про-. исходит, разворот эксцентрикового бло ка 3 на угол Ч г . Эсцентриковая втулка 7 при застопоренном шатуне 6 также поворачивается на некоторый угол Т, , в результате чего изменяется общий суммарный эксцентриситет, т.е. ход ползуна. Вектор суммарного эксцентриситета при этом всегда изменяется по вертикальной оси шатуна 6. В процессе регулировки хода ползуна вал 12.не вращается, т.е. ко- мандоаппарат не дает- команды на управление средствами механизации пресса (не показаны), которые остаются в исходном положении.
Затем энергоноситель подается в поршневую полость силового цилиндра, в результате чего проихсодят сцепление зубчатых венцов 10 и 11 стопорной обоймы 9 с зубчатыми венцами 8 и 4 эксцентриковой втулки 7 и эксцентрикового блока 3, вывод пальца 21 из паза 23 шатуна 6 и сцепления колеса 13 с шестерней 14. Пресс снова готов к работе.
На фиг.2 векторами е. , е обозна-- чены соответственно эксцентриситеты эксцентриковой втулки 7 и эксцентрикового блока 3; Y - вертикальная ось
шатуна пресса.
i
Так как е L e,, то суммарный эксцентриситет равен
е
е -cos 4+ e2 cos Q1
где Ч( - угол поворота эксцентриковой втулки;
Ј|2 - угол поворота эксцентрикового блока.
При 0, 0е, е е( + еЈ - максимальный суммарный эксцентриситет .
При 180°, q 0°, е е4-ег- минимальный суммарный эксцентриситет Технико-экономический эффект обе- спечивается благодаря улучшению ус
5
0
5
0
5
0
5
0
ловий эксплуатации и повышению производительности за счет сокращения времени на переналадку.
Формула изобретения
Механический пресс, содержащий смонтированный на закрепленной в станине оси приводной эксцентриковый блок с двумя наружными зубчаты- ми венцами, размещенную в головке шатуна с охватом эксцентрикового блока эксцентриковую втулку с .внутренним- , зубчатым венцом, стопорную обойму с наружным и внутренним зубчатыми венцами, установленную с возможностью зацепления своим наружным венцом с внутренним венцом эксцентриковой втулки, а внутренним венцом - с соотвтствующим наружным венцом эксцентрикового блока, а также зубчатую пару привода вала командеаппарата в виде колеса и закрепленной на валу шестерни, отличающий- с я тем, что., с целью улучшения условий экспулатации и повышения производительности за счет сокращения времени на переналадку, он снабжен узлом фиксации шатуна относительно станины и привода перемещения стопорной обоймы, выполненным в виде силового цилиндра с закрепленным в станине корпусом и подвижным элементом с пазом и защелкой, смонтированного на станине кронштейна, шарнир- но сочлененного с последним рычагом,,, а также -размещенного в станине параллельно подвижному элементу силового цилиндра пальца с пазом, эксцетри- ковая втулка выполнена с эксцентриситетом, большим эксцентриситета эксцентрикового блока, а в шатуне выполнен паз для размещения пальца, упомянутое колесо закреплено на стопорной обойме, при этом рычаг одним концом установлен в пазу пальца, а другим - в пазу подвижного элемента, защелка последнего смонтирована с возможностью взаимодействия с соответствующими торцами колеса и стопорной обоймой.
Фиг. 2
| Механический пресс | 1980 |
|
SU872309A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
