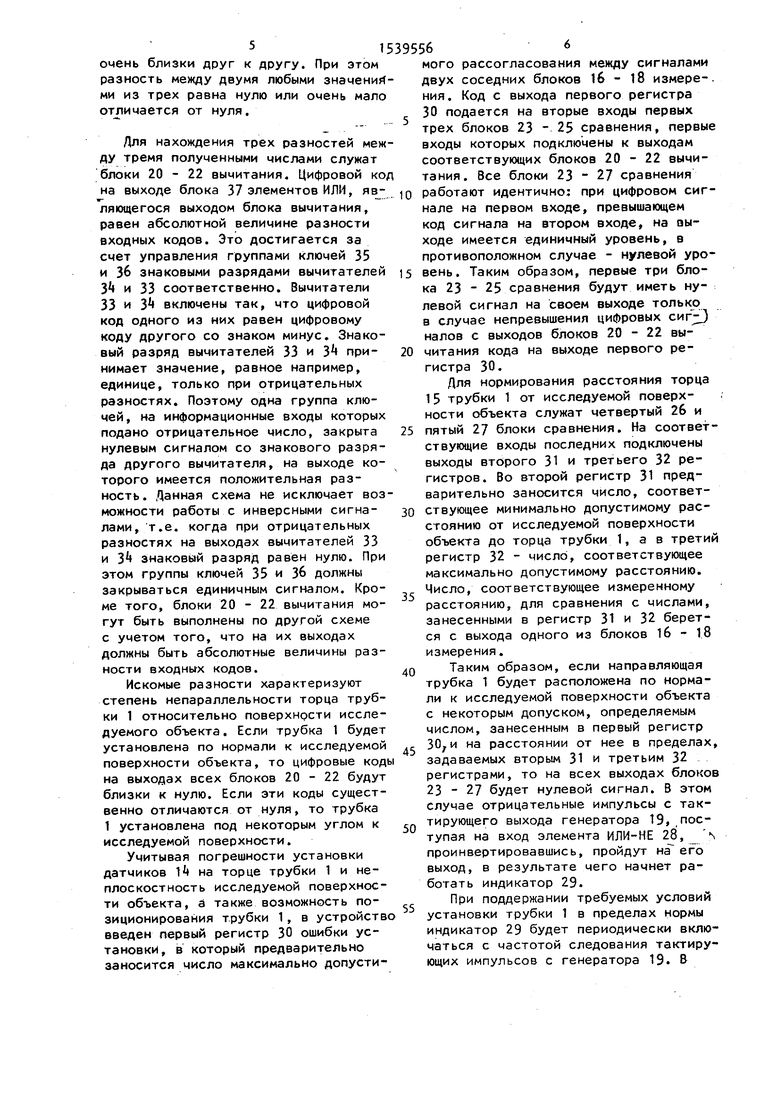
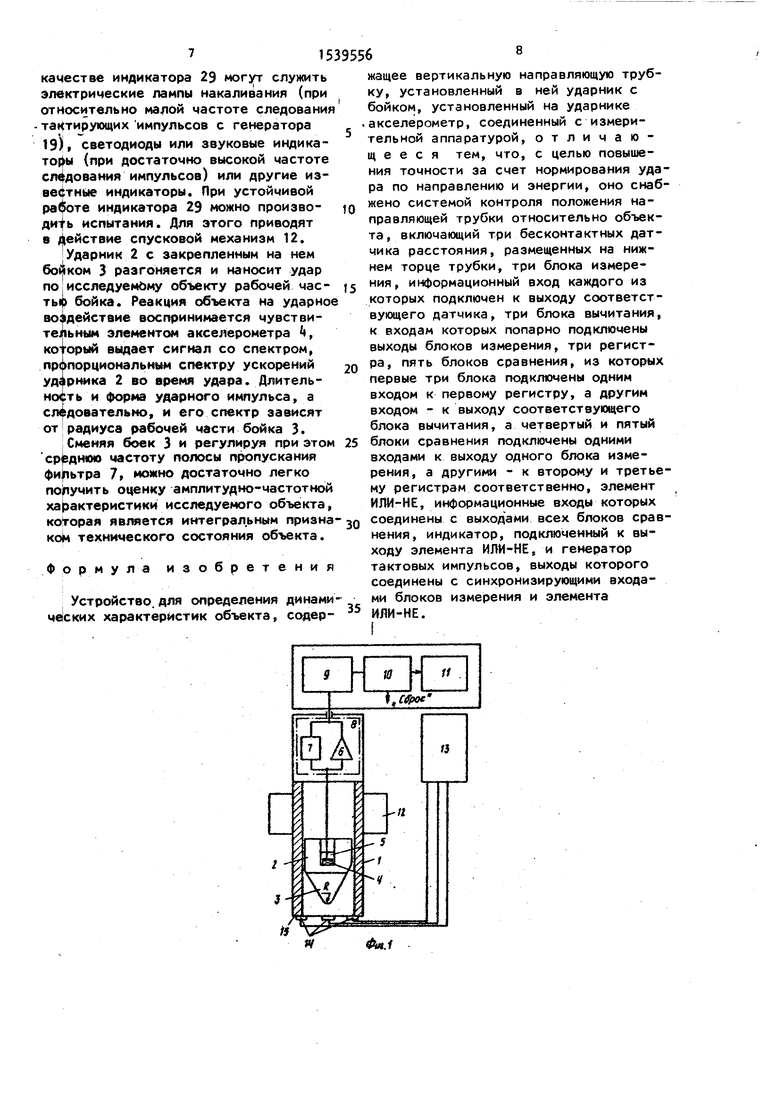
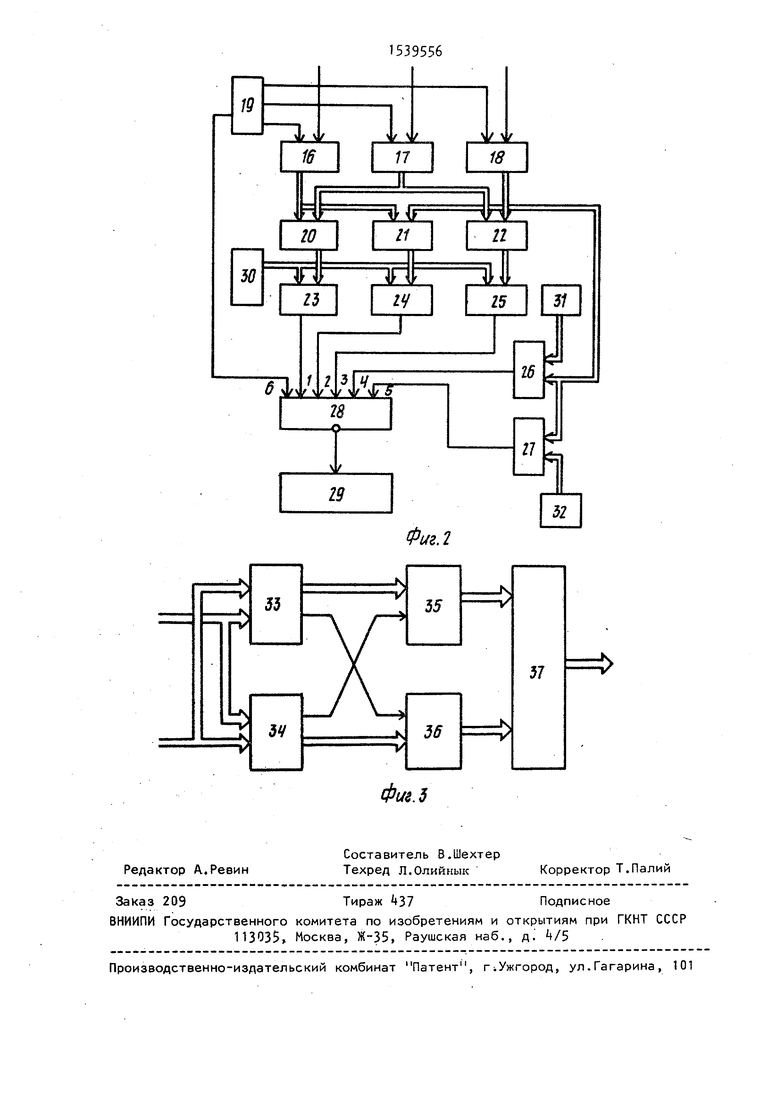
мегру измерительную аппаратуру, включающую последовательно соединенные усилитель 6, охваченный частотноза- висимой обратной связью с помощью по- лосового фильтра 7 так, что образуется активный полосовой фильтр 8, детектор 9, пиковый вольтметр 10 и индикатор 11, спусковой механизм 12 и систему 13 контроля положения направ- ляющей трубки 1 относительно объекта. Система 13 контроля включает три бесконтактных датчика 14 расстояния (например, ультразвуковые микрофоны), размещенных на нижнем торце 15 труб- ки 1, три блока 16 - 18 измерения, инфррмационный вход каждого из которых подключен к выходу соответствующего датчика 14, а синхронизирующий - к выходу генератора 19 тактовых им- пульсов, три блока 20 - 22 вычитания, к входам которых попарно подключены выходы блоков 16 - 18 измерения, пять блоков 23 - 27 сравнения, элемент ИЛИ-НЕ 28, к выходу которого подключе индикатор 29, и три регистра 30 - 32. У первых трех блоков 23 - 25 сравнения один из входов подключен к первому регистру 30, а другой вход - к выходу соответствующего блока 20 - 22 вычитания. Четвертый 26 и пятый 27 блоки сравнения подключены одними входами к выходу одного из блоков измерения (на фиг. 2 - к выходу блока 18), а другими входами к второму 31 и третьему 32 регистрам соответст- венно. Выходы всех блоков 23 - 27 сравнения соединены с информационными входами элемента ИЛИ-НЕ 28, а синхронизирующий вход последнего соединен с выходом генератора 19 тактовых импульсов.
Применяемые в системе 13 контроля блоки 20 - 22 вычитания содержат каждый (фиг. 3) два вычитэтеля 33 и 34, первый вход каждого из которых соединен со вторым входом другого и является одним из входов блоков 20-22 Выходы вычитателей 33 и 34 через соответствующие группы ключей 35 и 36 соединены с отдельными группами входов блока 37 элементов ИЛИ, выход которого является выходом блока вычитания. Знаковый разряд вычитателя 33 подключен к управляющему входу группы ключей 36, а знаковый разряд вычитателя 34 - к управляющему входу -группы ключей 35. /
Q
0
0 5
В качестве спускового механизма 12 в устройстве может быть использована электромагнитная катушка, с помощью которой может также осуществляться подъем ударника 2 на позицию сбрасывания. Фильтр 7 может быть выполнен с регулируемой средней частотой полосы пропускания.
Устройство работает следующим обра зом.
Направляющую трубку 1 устанавливают у исследуемого объекта над требуемым местом удара. После этого осуществляют позиционирование трубки 1 по нормали к исследуемой поверхности объекта. Контроль точного расположения трубки 1 по нормали осуществляют следующим образом. При включении системы 13 контроля начинает работать генератор 19 тактовых импульсов. Импульсы с его трех выходов последовательно запускают три блока 16 - 18 измерения расстояний между торцом 15 трубки 1 и поверхностью объекта. Измерение происходит ультразвуковым методом. При этом запуск блока 17 и блока 18 происходит лишь после окончания работы блока 16 и блока 17 соответственно. Это сделано с целью повышения надежности определения искомого расстояния. При этом ультразвуковой сигнал одного из датчиков 14 не будет обрабатываться другими блоками измерения. Очевидно, что максимальная частота следования импульсов с генератора 19 определяется быстродействием измерения блоков 16 - 18.
Работа всех трех блоков 16 - 18 происходит одинаково и начинается по синхронизирующему импульсу. По истечении некоторого времени, необходимого для работы блоков 16 - 18, на их выходах появляется цифровой код, соответствующий измеренному в данный момент расстоянию.
Оценку нормальности расположения направляющей трубки 1 относительно поверхности исследуемого объекта производят по критерию равенства расстояний от трех точек на торце 15 трубки 1 до поверхности объекта. Датчики И, закрепленные в этих точках, расположены на одинаковом расстоянии друг от друга. В случае равенства всех трех расстояний, измеренных блоками 16 - 18, цифровые коды на выходах последних равны или могут быть
очень близки друг к другу. При этом разность между двумя любыми значениями из трех равна нулю или очень мало отличается от нуля.
Для нахождения трех разностей между тремя полученными числами служат блоки 20 - 22 вычитания. Цифровой ко на выходе блока 37 элементов ИЛИ, ляющегося выходом блока вычитания, равен абсолютной величине разности входных кодов. Это достигается за счет управления группами ключей 35 и 36 знаковыми разрядами вычитателей З и 33 соответственно. Вычитатели 33 и включены так, что цифровой код одного из них равен цифровому коду другого со знаком минус. Знаковый разряд вычитателей 33 и 3 принимает значение, равное например, единице, только при отрицательных разностях. Поэтому одна группа ключей, на информационные входы которых подано отрицательное число, закрыта нулевым сигналом со знакового разряда другого вычитателя, на выходе которого имеется положительная разность. Данная схема не исключает возможности работы с инверсными сигналами, т.е. когда при отрицательных разностях на выходах вычитателей 33 и 3 знаковый разряд равен нулю. При этом группы ключей 35 и 36 должны закрываться единичным сигналом. Кроме того, блоки 20-22 вычитания могут быть выполнены по другой схеме с учетом того, что на их выходах должны быть абсолютные величины разности входных кодов.
Искомые разности характеризуют степень непараллельности торца трубки 1 относительно поверхности исследуемого объекта. Если трубка 1 будет установлена по нормали к исследуемой поверхности объекта, то цифровые коды на выходах всех блоков 20 - 22 будут близки к нулю. Если эти коды существенно отличаются от нуля, то трубка 1 установлена под некоторым углом к исследуемой поверхности.
Учитывая погрешности установки датчиков 1А на торце трубки 1 и неплоскостность исследуемой поверхности объекта, а также возможность позиционирования трубки 1, в устройство введен первый регистр 30 ошибки установки, в который предварительно заносится число максимально допусти1
яо
1539556
0
мого рассогласования между сигналами двух соседних блоков 16 - 18 измерения. Код с выхода первого регистра 30 подается на вторые входы первых трех блоков 23 - 25 сравнения, первые входы которых подключены к выходам соответствующих блоков 20 - 22 вычитания. Все блоки 23 - 27 сравнения работают идентично; при цифровом си(- нале на первом входе, превышающем код сигнала на втором входе, на выходе имеется единичный уровень, в противоположном случае - нулевой уро5 вень. Таким образом, первые три блока 23 25 сравнения будут иметь нулевой сигнал на своем выходе только в случае непревышения цифровых cnnj налов с выходов блоков 20 - 22 вы0 читания кода на выходе первого регистра 30.
Для нормирования расстояния торца 15 трубки 1 от исследуемой поверхности объекта служат четвертый 26 и
5 пятый 27 блоки сравнения. На соответствующие входы последних подключены выходы второго 31 и третьего 32 регистров. Во второй регистр 31 предварительно заносится число, соответствующее минимально допустимому расстоянию от исследуемой поверхности объекта до торца трубки 1, а в третий регистр 32 - число, соответствующее максимально допустимому расстоянию. Число, соответствующее измеренному расстоянию, для сравнения с числами, занесенными в регистр 31 и 32 берется с выхода одного из блоков 16 - 18 измерения.
Таким образом, если направляющая трубка 1 будет расположена по нормали к исследуемой поверхности объекта с некоторым допуском, определяемым числом, занесенным в первый регистр 307и на расстоянии от нее в пределах, задаваемых вторым 31 и третьим 32 регистрами, то на всех выходах блоков 23 - 27 будет нулевой сигнал. В этом случае отрицательные импульсы с тактирующего выхода генератора 19, поступая на вход элемента ИЛИ-НЕ 28, N проинвертировавшись, пройдут на его выход, в результате чего начнет работать индикатор 29.
При поддержании требуемых условий установки трубки 1 в пределах нормы индикатор 29 будет периодически включаться с частотой следования тактирующих импульсов с генератора 19. В
0
5
0
5
0
5
качестве индикатора 29 могут служить лектрические лампы накаливания (при тносительно малой частоте следования актирующих импульсов с генератора I9)f светодиоды или звуковые индикаторы (при достаточно высокой частоте следования импульсов) или другие известные индикаторы. При устойчивой работе индикатора 29 можно произво- to ить испытания. Для этого приводят в действие спусковой механизм 12.
Ударник 2 с закрепленным на нем бойком 3 разгоняется и наносит удар по исследуемому объекту рабочей час- J5 ты бойка. Реакция объекта на ударное воздействие воспринимается чувствительным элементом акселерометра k, который выдает сигнал со спектром, пропорциональным спектру ускорений 20 ударника 2 во время удара. Длительность и форма ударного импульса, а следовательно, и его спектр зависят от радиуса рабочей части бойка 3.
Сменяя боек 3 и регулируя при этом 25 среднюю частоту полосы пропускания фильтра 7, можно достаточно легко получить оценку амплитудно-частотной характеристики исследуемого объекта, которая является интегральным призна-зд ком технического состояния объекта.
Формула изобретения
Устройство, для определения динамических характеристик объекта, содержащее вертикальную направляющую трубку, установленный в ней ударник с бойком, установленный на ударнике акселерометр, соединенный с измерительной аппаратурой, отличающееся тем, что, с целью повышения точности за счет нормирования удара по направлению и энергии, оно снабжено системой контроля положения направляющей трубки относительно объекта, включающий три бесконтактных датчика расстояния, размещенных на нижнем, торце трубки, три блока измерения, информационный вход каждого из которых подключен к выходу соответствующего датчика, три блока вычитания, к входам которых попарно подключены выходы блоков измерения, три регистра, пять блоков сравнения, из которых первые три блока подключены одним входом к первому регистру, а другим входом - к выходу соответствующего блока вычитания, а четвертый и пятый блоки сравнения подключены одними входами к выходу одного блока измерения, а другими - к второму и третьему регистрам соответственно, элемент ИЛИ-НЕ, информационные входы которых соединены с выходами всех блоков сравнения, индикатор, подключенный к выходу элемента ИЛИ-НЕ, и генератор тактовых импульсов, выходы которого соединены с синхронизирующими входами блоков измерения и элемента ИЛИ-НЕ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сварки и устройство для его осуществления | 1987 |
|
SU1493408A1 |
| ИМИТАТОР ПАССИВНОГО РАДИОЛОКАТОРА | 1988 |
|
SU1841093A2 |
| СЧЕТЧИК ПОТЕРЬ АКТИВНОЙ ЭЛЕКТРОЭНЕРГИИ В ТРАНСФОРМАТОРЕ | 2015 |
|
RU2589498C1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА | 1991 |
|
RU2013025C1 |
| Устройство для определения экстремумов электрического сигнала | 1984 |
|
SU1273816A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОТЕРЬ В ТРАНСФОРМАТОРЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2563331C1 |
| Способ сварки и устройство для его осуществления | 1987 |
|
SU1555080A1 |
| Устройство регулировки осветительно-проекционных систем | 1987 |
|
SU1580307A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2078302C1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
Изобретение относится к исследованию динамических характеристик объектов методом ударного возбуждения. Цель изобретения - повышение точности за счет нормирования удара по направлению и энергии. Это достигается за счет оснащения устройства для определения динамических характеристик объекта, содержащего вертикальную направляющую трубку и разгоняемый в ней ударник, на котором установлен акселерометр, системой контроля положения направляющей трубки относительно объекта. Положение трубки контролируется с помощью трех бесконтактных датчиков расстояния, размещенных на нижнем торце трубки, подключенных к датчикам трех блоков измерения и трех блоков вычитания, к входам которых попарно подключены выходы блоков измерения. Первый регистр и три блока сравнения обеспечивают определение превышения допустимого отклонения оси трубки от нормали к поверхности объекта. Второй и третий регистры и четвертый и пятый блоки сравнения служат для контроля нахождения расстояния от торца трубки до объекта в пределах допуска. Элемент ИЛИ-НЕ, к входам которого подключены выходы всех блоков сравнения, обеспечивает включение индикатора, если отклонение оси трубки от нормали и расстояние от торца трубки до объекта находятся в пределах допуска. 3 ил.
J/5
W
Фиг. 2
57
