Изобретение относится к неразрушающему контролю материалов и изделий и может быть использовано для определения координат дефектов но сигналам акустической эмиссии (АЭ) при сварке конструкций и испытании их избыточным давлением.
Целью изобретения является повышение достоверности и расширение функциональных возможностей за счет учета различной физической природы возникновения погрешностей при определении координат источников как непрерывной, так и импульсной АЭ тремя различными методами локации.
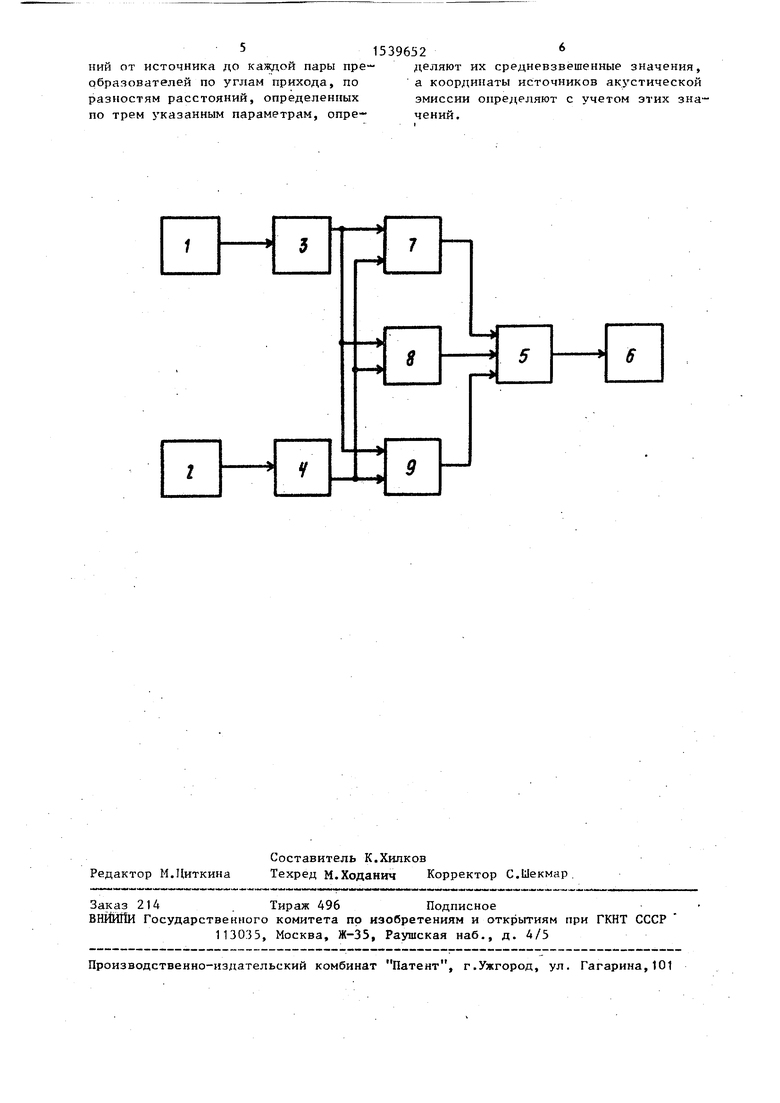
На чертеже представлена функциональная схема реализации способа определения координат источников АЭ.
Схема содержит не менее двух каналов , каждый из которых состоит из последовательно соединенных приемного преобразователя 1,2 и блока 3,4 первичной обработки сигналов, последовательно соединенных блока 5 вычисления средневзвешенной разности расстояний и блока 6 вычисления координат источников АЭ, блока 7 вычисления разности расстояний по временам прихода сигналов, блока 8 вычисления разности, расстояний по отношению энергий сигналов и блока 9 вычисления разности расстояний по углам прихода сигналов (углам направления), выходы которых соединены с соответствующими входами блока 5 вычисления средневзвешенной разности расстояний. Выход блока 3
сд со со
сд ю
31539652
первичной обработки сигналов первого канала соединен с первыми входами блока 7 вычисления разности времен прихода сигналов, блока 8 вычисления разности расстояний по отношению энер гий сигналов и блока 9 вычисления разности расстояний по углам прихода сигналов; вторые входы указанных блоков соединены с выходом блока 4 первичной обработки-сигналов второго канала.
Способ определения координат источников АЭ реализуется следующим образом.4Г
ние разности расстояний в соответствии с выражением
2 - -2. .4tllut.i5..EfEL
-,-5
10
Аг
б.
Ј+ б
i
| На поверхности контролируемого изделия (на чертеже не показано) размещают приемные преобразователи 1,2 на расстоянии В друг от друга. Изделие нагружают, например, избыточным давлением. Принимают сигналы АЭ преобразователями 1,2. Определяют времена t и t прихода сигналов на каждый преобразователь, энергии сигналов Е ( , Е и углы , Ч прихода сиггде (5ut Cfy, 3 априорно известные среднеквадратические отклонения (погрешности) методов локации по разностям времен прихода, углу прихода и отношению энергии соответственно, которые определяют экспериментально, например, с помощью преобразователя- излучателя (на чертеже не показан), имитирующего сигналы АЭ на поверхности изделия. Значения Дг,, передают в блок 6 вычисления координат источников АЭ, где вычисляют координаты источника АЭ путем решения системы
20
где определяют аналогично дг,
„ ,25 для двух других каналов: одного из
налов с помощью блоков 3,4 первичной рассмотренных и третьего (на чертеже
30
обработки сигналов соответственно. Измеренные времена t и t, подают на вход блока 7 вычисления разности расстояний по временам прихода сигналов; в соответствии с выражением
Дг 7j(t(-t2) -с, где с - скорость
распространения акустического сигнала в изделии, определяют указанную разность расстояний от источника сиг-35 налов АЭ до преобразователей 1,2. Измеренные энергии Е,,Е2 подают на вход блока 8 вычисления разности расстояний но отношению энергий сигналов;
40
не показан),
Таким образом, данный способ позволяет повысить достоверность и расширить функциональные возможности за счет определения средневзвешенного значения разности расстояний от приемных преобразователей до источника АЭ, найденного с учетом разностей расстояний, определенных тремя различ ными методами определения координат иточников АЭ.
Формула изобретения
в соответствии с выражением Дг
1 Е, sin --1п(----т--тг), где oi коэффициент
НоС S 111 т
определяющий затухание сигнала в изделии, определяют указанную разность расстояний от источника сигналов A3 до преобразователей 1,2 АЭ. Измеренные углы Ч,, подают на вход блока 9 вычисления разности расстояний по углам прихода сигналов; указанную разность расстояний определяют в соответствии с выражением А Гц,
„sin -sinf, s nT F-tFT Вычисленные значения
разности расстояний Л rut ,ДгДЕ ,д г, передают на вход блока Ь вычисления средневзвешенной разности расстояний и определяют средневзвешенное значе-
4Г
ние разности расстояний в соответствии с выражением
2 - -2. .4tllut.i5..EfEL
5
10
Аг
б.
Ј+ б
i
где (5ut Cfy, 3 априорно известные среднеквадратические отклонения (погрешности) методов локации по разностям времен прихода, углу прихода и отношению энергии соответственно, которые определяют экспериментально, например, с помощью преобразователя- излучателя (на чертеже не показан), имитирующего сигналы АЭ на поверхности изделия. Значения Дг,, передают в блок 6 вычисления координат источников АЭ, где вычисляют координаты источника АЭ путем решения системы
где определяют аналогично дг,
для двух других каналов: одного из
0
5
0
5
0
5
не показан),
Таким образом, данный способ позволяет повысить достоверность и расширить функциональные возможности за счет определения средневзвешенного значения разности расстояний от приемных преобразователей до источника АЭ, найденного с учетом разностей расстояний, определенных тремя различными методами определения координат иточников АЭ.
Формула изобретения
Способ определения координат источников акустической эмиссии, заключающийся в том, что принимают сигналы акустической эмиссии п преобразователями, определяют время прихода сигналов на каждый преобразователь, энергию сигналов, принятых каждым преобразователем, и по ним определяют соответствующие разности расстояний от источника до каждой пары преобразователей, по которым судят о координатах источников акустической эмиссии, отличающийся тем, что, с целью повышения достоверности и расширения функциональных возможностей, определяют углы прихода сигналов на каждый преобразователь относительно выбранной системы координат, дополнительно определяют разности расстоя515396526
ний от источника до каждой пары пре- деляют их средневзвешенные значения, образователей по углам прихода, по а координаты источников акустической разностям расстояний, определенных эмиссии определяют с учетом этих знало трем указанным параметрам, опре- чений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат источника акустической эмиссии и устройство для его осуществления | 1989 |
|
SU1670589A1 |
| Способ определения координат источников акустической эмиссии при планарной локации | 2024 |
|
RU2830422C1 |
| Акустико-эмиссионный способ контроля изделий | 1988 |
|
SU1582118A1 |
| СПОСОБ ЛОКАЦИИ ДЕФЕКТОВ | 2013 |
|
RU2523077C1 |
| Способ определения координат дефектов при акустико-эмиссионном контроле | 2021 |
|
RU2775204C1 |
| СПОСОБ ЛОКАЦИИ ДЕФЕКТОВ ПРИ АКУСТИКО-ЭМИССИОННОМ КОНТРОЛЕ | 2015 |
|
RU2586087C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ СИГНАЛОВ АКУСТИЧЕСКОЙ ЭМИССИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2356043C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ КООРДИНАТ ПРЕОБРАЗОВАТЕЛЕЙ АКУСТИЧЕСКОЙ ЭМИССИИ | 2006 |
|
RU2330277C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ПРЕОБРАЗОВАТЕЛЕМ И ИСТОЧНИКОМ АКУСТИЧЕСКОЙ ЭМИССИИ | 2002 |
|
RU2229121C1 |
| СПОСОБ ОБНАРУЖЕНИЯ В ПРОЦЕССЕ СВАРКИ ДЕФЕКТОВ В СВАРНЫХ ШВАХ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ ПО АКУСТИЧЕСКИМ СИГНАЛАМ | 1999 |
|
RU2156456C1 |
Изобретение относится к неразрушающему контролю материалов и изделий и может быть использовано для определения координат дефектов по сигналам акустической эмиссии (АЭ) при сварке конструкций и испытании их избыточным давлением. Целью изобретения является повышение достоверности и расширение функциональных возможностей за счет учета различной физической природы возникновения погрешностей при определении координат источников как непрерывной, так и импульсной АЭ тремя различными методами локации. Определяют разности расстояний от источника АЭ до приемных преобразователей на основе измерения разности времен прихода, энергий и углов прихода сигнала. Затем определяют средневзвешенное значение разности расстояний и координаты источника АЭ и по ним координаты источников. 1 ил.
| Способ определения координат источников акустической эмиссии в двумерных объектах | 1980 |
|
SU987510A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SPARTAN AE SYSTEM | |||
| Physical Acoustic corporation Specifications subject to change | |||
| Printed in USA, 1983. | |||
