Изобретение относится к неразрушающему контролю металлических конструкций методом акустической эмиссии и может быть использовано для определения координат дефектов в протяженных и крупногабаритных объектах железнодорожной, авиационной, космической, нефтяной и газовой промышленности при ограниченном доступе к ним.
Известен способ определения координат источников сигналов акустической эмиссии (см. патент RU №2356043 от 27.06.2007), включающий установку n акустических преобразователей на конструкции, определение скорости распространения сигналов акустической эмиссии на конструкции и разности их времен прихода на акустические преобразователи, вычисление по ним координат источника сигналов акустической эмиссии, в зону, ограниченную пьезоантенной, устанавливается акустический преобразователь имитатора, а расчет времен прихода сигналов акустической эмиссии на акустические преобразователи, составляющие пьезоантенну, производится по отфильтрованным с использованием вейвлет-фильтрации сигналам, рассчитывается погрешность определения координат акустического преобразователя имитатора, подбираются пороговые значения по амплитуде коэффициентов для вейвлет-фильтрации, при которых погрешность определения координат акустического преобразователя имитатора принимает минимальное значение, изменяется частотный диапазон вейвлет-фильтрации до тех пор, пока погрешность определения координат акустического преобразователя имитатора не примет минимальное значение, после чего металлическая конструкция нагружается, а по полученным параметрам вейвлет-фильтрации производится фильтрация сигналов акустической эмиссии и определение их координат.
Недостатком данного способа является то, что координаты источника сигналов определяются по разности времен их прихода на акустические преобразователи, то есть необходимо использование нескольких преобразователей, составляющих пьезоантенну, что является ограничивающим фактором при контроле протяженных объектов.
Наиболее близким к предлагаемому решению является способ локации дефектов при акустико-эмиссионном контроле (см. патент RU №2586087 от 30.03.2015), заключающийся в том, что на контролируемом изделии устанавливают преобразователи акустической эмиссии, изделие нагружают, принимают сигналы акустической эмиссии, генерируемые дефектом изделия, преобразователи акустической эмиссии устанавливают на объект контроля группами не менее трех в каждой, на расстоянии между центрами преобразователей в группе, не превышающем минимальной длины акустической волны, в каждой группе для каждого сигнала определяют разность фаз между сигналами, зарегистрированными преобразователями, по которым определяют углы, характеризующие направления распространения волны относительно каждой группы преобразователей, а координаты дефектов определяют по формулам:
где L - расстояние между группами преобразователей, tan(α1) и tan(α11) - тангенсы углов направления распространения волны в группах преобразователей.
Недостатком способа, принятого за прототип, являются ограничения, связанные с необходимостью установки двух групп датчиков на объект контроля, что не всегда является возможным при ограниченном доступе к нему, например, защитный кожух.
Основной задачей изобретения является определение координат источника АЭ с использованием минимального количества приемных преобразователей при ограниченном доступе к объекту контроля.
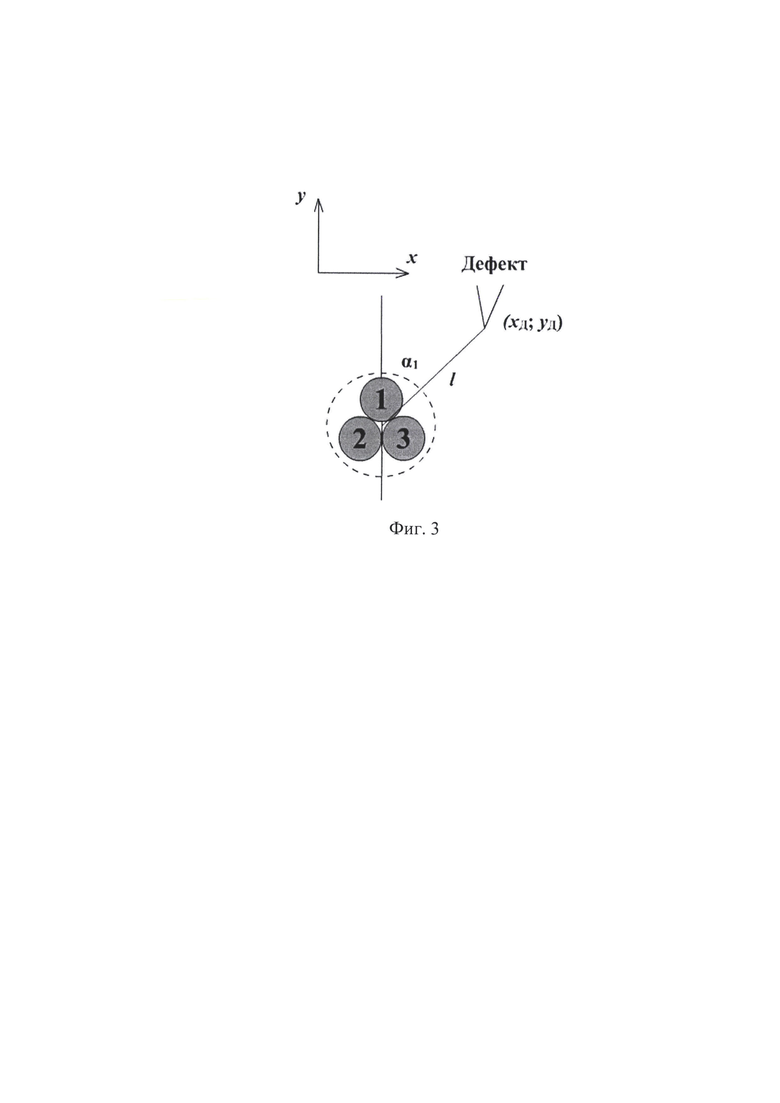
Поставленная задача решается за счет того, что в предлагаемом способе определения координат дефектов при акустико-эмиссионном контроле, заключающемся в том, что на контролируемом изделии устанавливают преобразователи акустической эмиссии, не менее трех на расстоянии между центрами преобразователей в группе, не превышающем минимальной длины акустической волны, изделие нагружают, принимают сигналы акустической эмиссии, генерируемые дефектом изделия, на объект контроля устанавливают группу преобразователей акустической эмиссии не менее трех, в группе для каждого сигнала определяют разность фаз между сигналами, зарегистрированными преобразователями, по которым определяют угол, характеризующий направление распространения волны, при этом на изделие устанавливают только одну группу преобразователей акустической эмиссии и определяют расстояние до дефекта по времени нарастания переднего фронта волны, а координаты дефекта определяют по формулам
хд=l⋅cosα1,
yд=l⋅sinα1,
где l - расстояние от группы преобразователей до дефекта, мм,
sinα1 и cosα1 - синус и косинус угла направления распространения волны в группе преобразователей.
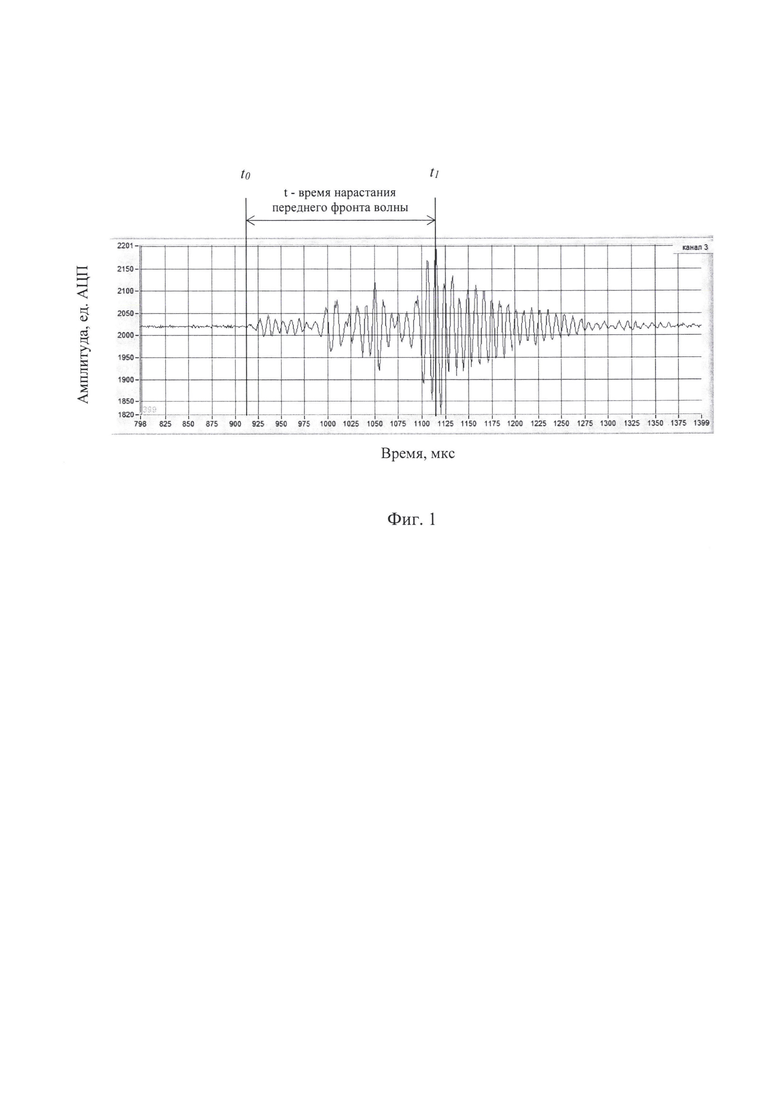
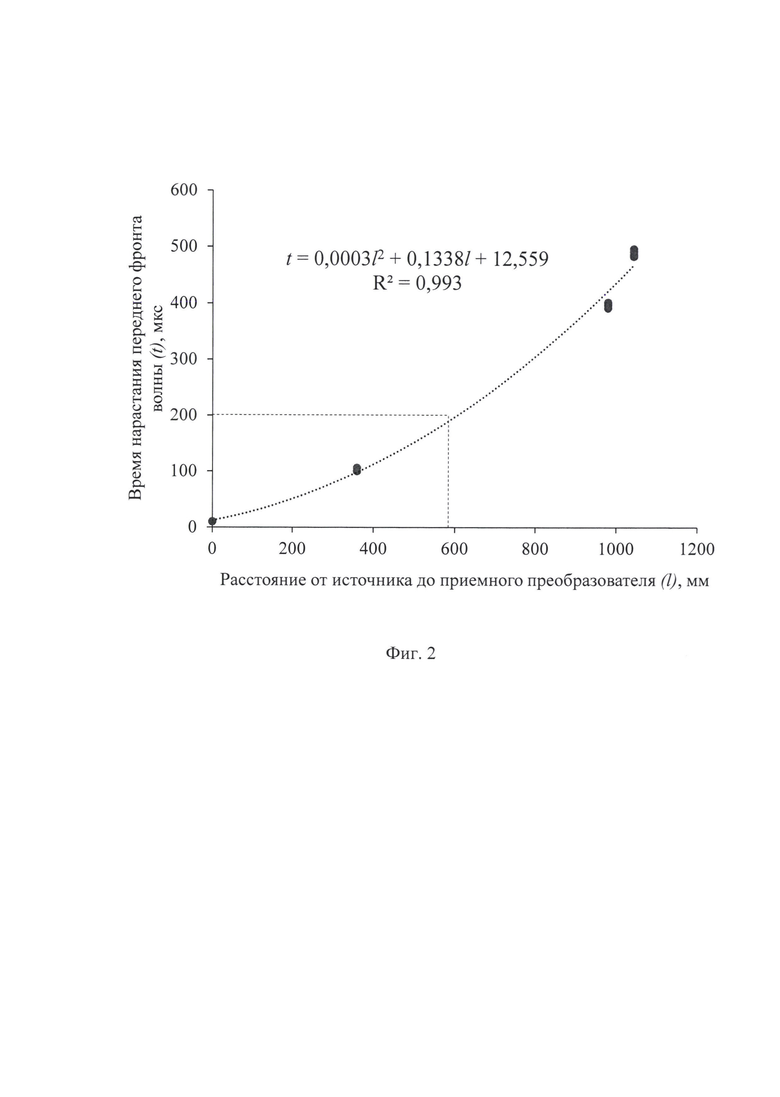
На Фиг. 1 представлен график формы сигнала от времени. На Фиг. 2 представлен график зависимости времени нарастания переднего фронта волны от расстояния от источника до приемного преобразователя. На Фиг. 3 представлена схема размещения группы преобразователей акустической эмиссии.
Способ реализуется следующим образом.
На контролируемом изделии устанавливают не менее трех преобразователей акустической эмиссии на расстоянии между центрами преобразователей, не превышающем минимальной длины акустической волны, в группе для каждого сигнала определяют разность фаз между сигналами, зарегистрированными преобразователями, по которым определяют угол, характеризующий направление распространения волны по формуле:

где ϕ21 - разность фаз сигналов на преобразователях 2 и 1; ϕ31 - разность фаз сигналов на преобразователях 3 и 1; затем изделие нагружают, принимают сигналы акустической эмиссии, генерируемые дефектом изделия, и определяют расстояние до дефекта по времени нарастания переднего фронта волны, а координаты дефекта определяют по формулам:


где l - расстояние от группы преобразователей до дефекта, мм;
sinα1 и cosα1 - синус и косинус угла направления распространения волны в группе преобразователей.
Пример 1
Экспериментальные исследования проводили на сосуде давления, изготовленного из стали 20 и имеющего размеры: длина 1150 мм, диаметр днища 219 мм, толщина днища 45 мм, толщина стенки обечайки 5 мм.
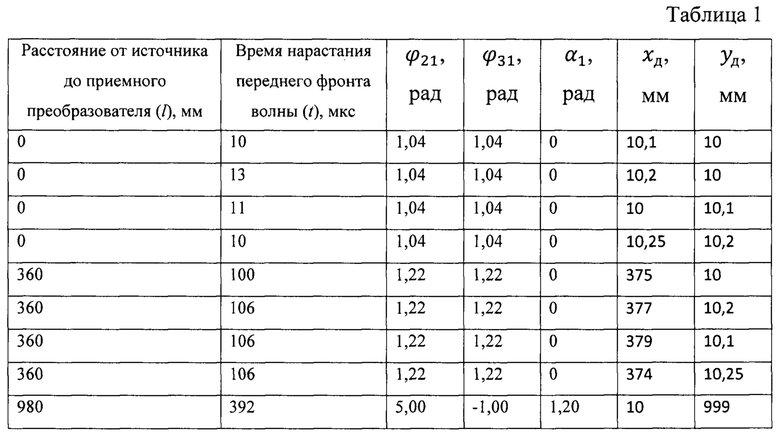
Предварительно перед началом проведения контроля экспериментальным путем определяли время нарастания переднего фронта волны в зависимости от расстояния на образце, имеющем аналогичные с контролируемым объектом форму и материал. Для этого на известном расстоянии от преобразователей с помощью имитатора Су-Нильсена (излом карандаша) создавали акустическую волну и регистрировали ее приемными преобразователями.
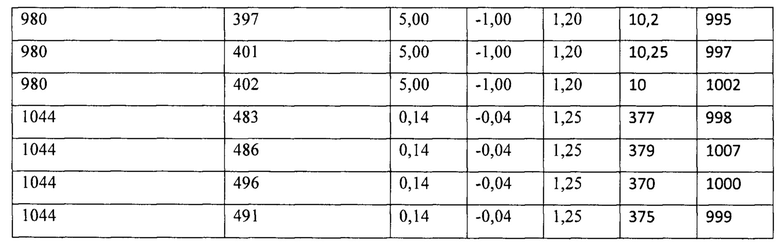
Затем на исследуемом объекте была проведена серия экспериментов, имитирующих рост трещины. На сосуд устанавливали преобразователи акустической эмиссии, чувствительность которых калибровали с помощью имитатора Су-Нильсена (излом карандаша). Данные приведены в таблице 1.
Затем строили экспериментальную зависимость времени нарастания переднего фронта волны от расстояния от источника до приемного преобразователя (см. Фиг. 2).
После этого сосуд нагружали гидравлически до максимального давления 10 МПа с помощью насосной станции со скоростью 3-5 МПа/мин и регистрировали сигналы акустико-эмиссионной системой СЦАД 16.03 (свидетельство RU.C.27.007.A №39729, зарегистрировано в Государственном реестре средств измерений №18892-10). Сигналы, зарегистрированные преобразователями, передаются в компьютер, где строятся графики форм сигналов от времени. В компьютере реализован алгоритм определения разности фаз в группе преобразователей с помощью корреляционной функции по положению максимума корреляционной функции сигналов. С преобразователей группы определяли разность фаз между преобразователями 2 и 1, 3 и 1, которые составили: ϕ21=0 рад, ϕ31=1,4⋅π рад. Экспериментально определенные разности фаз приведены в табл. 1. Далее компьютер в каждой группе преобразователей вычисляет значение угла распространения волны α1 (данные в таблице 1) по формуле 1.
По графику определяли время нарастания переднего фронта волны (см. Фиг. 1). Время нарастания переднего фронта волны определяли по разности времени, когда наступил пик по амплитуде, и времени, когда началось колебание:
 - полклетки в мкс;
- полклетки в мкс;
t1=1100+12,5=1112,5 мкс - время наступления пика по амплитуде;
t0=900+12,5=912,5 мкс - время начала колебания;
t=t1-t0=1112,5-912,5=200 мкс - время нарастания переднего фронта волны.
По экспериментальной зависимости времени нарастания переднего фронта волны от расстояния от источника до приемного преобразователя (полученной при калибровке чувствительности каналов) находили расстояние от преобразователя до дефекта (см. Фиг. 2).
После чего согласно размещенной группе преобразователей акустической эмиссии на объекте (см. Фиг. 3) вычисляются координаты дефекта xд и yд в соответствии с формулами 2, 3. Данные сведены в табл. 1.
Данные были обработаны по алгоритму, содержащемуся в документе А02.411709.001 МП «Системы цифровые акустико-эмиссионные диагностические модификаций СПАД-16.02 и СПАД-16.03. Методика поверки» (утвержден ФГУП «СНИИМ» 12 сентября 2018 г.). Результаты обработки данных сведены в табл. 2.
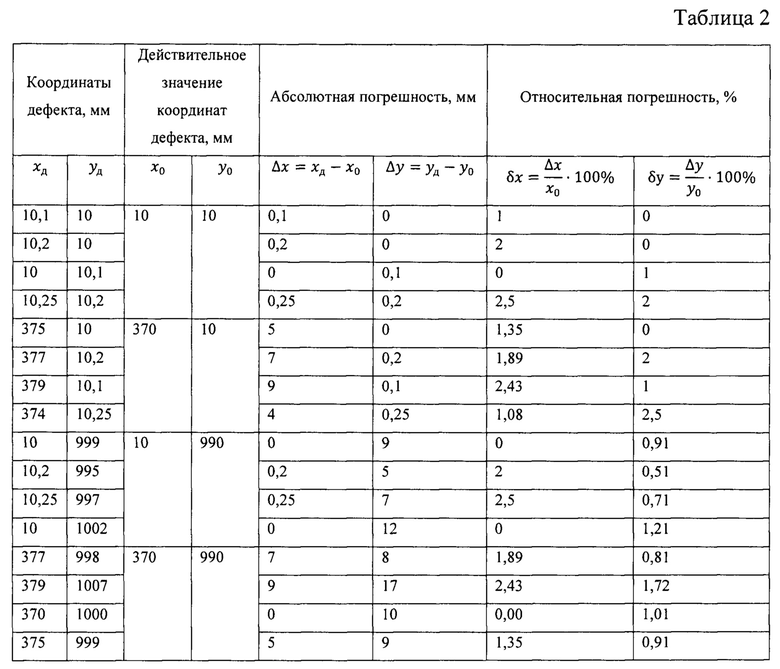
Согласно табл. 2 допускаемая относительная основная погрешность измерений координат дефекта не превышает 3%.
Свидетельством того, что определение расстояния от источника сигнала до приемного преобразователя возможно по времени нарастания переднего фронта волны, является вычисленный R - коэффициент детерминации, который равен 0,993 (см. Магнус Я.Р., Катышев П.К., Пересецкий А.А. Эконометрика. Начальный курс. М., Издательство Дело, 2004. - 576 с.) и это дает возможность использовать полученную модель для определения любых расстояний до дефекта по времени нарастания переднего фронта волны.
R - коэффициент детерминации (показывает долю вариации результативного признака t под влиянием факторного признака l, связан с коэффициентом корреляции квадратичной зависимостью, при отсутствии связи равен нулю, при функциональной связи - единице).
l - расстояние от источника до приемного преобразователя, мм (значения приведены в табл. 1).
t - время нарастания переднего фронта волны, мкс (значения приведены в табл. 1).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ СИГНАЛОВ АКУСТИЧЕСКОЙ ЭМИССИИ | 2016 |
|
RU2633002C1 |
| СПОСОБ АКУСТИКО-ЭМИССИОННОГО КОНТРОЛЯ ДЕФЕКТОВ В КОМПОЗИЦИОННЫХ КОНСТРУКЦИЯХ НА ОСНОВЕ УГЛЕПЛАСТИКА | 2017 |
|
RU2674573C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ СИГНАЛОВ АКУСТИЧЕСКОЙ ЭМИССИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2356043C2 |
| АКУСТИКО-ЭМИССИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФЕКТОВ СТРУКТУРЫ ОБРАЗЦА ИЗ УГЛЕПЛАСТИКА | 2019 |
|
RU2704144C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ СИГНАЛОВ АКУСТИЧЕСКОЙ ЭМИССИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2684443C1 |
| АКУСТИКО-ЭМИССИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ТИПА ДЕФЕКТА СТРУКТУРЫ ОБРАЗЦА ИЗ УГЛЕПЛАСТИКА | 2017 |
|
RU2676209C9 |
| АКУСТИКО-ЭМИССИОННЫЙ СПОСОБ ДИАГНОСТИРОВАНИЯ ИЗДЕЛИЙ ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ НА ОСНОВЕ УГЛЕПЛАСТИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599327C1 |
| Способ акустико-эмиссионного контроля металлических объектов и устройство для его осуществления | 2020 |
|
RU2736175C1 |
| СПОСОБ ЛОКАЦИИ ДЕФЕКТОВ ПРИ АКУСТИКО-ЭМИССИОННОМ КОНТРОЛЕ | 2015 |
|
RU2586087C1 |
| Способ акустико-эмиссионного контроля сосудов, работающих под давлением | 2024 |
|
RU2830488C1 |
Изобретение относится к неразрушающему контролю металлических конструкций методом акустической эмиссии и может быть использовано для определения координат дефектов в протяженных и крупногабаритных объектах железнодорожной, авиационной, космической, нефтяной и газовой отраслях промышленности при ограниченном доступе к ним. Сущность заключается в том, что на контролируемом изделии устанавливают преобразователи акустической эмиссии, не менее трех, на расстоянии между центрами преобразователей в группе, не превышающем минимальной длины акустической волны, изделие нагружают, принимают сигналы акустической эмиссии, генерируемые дефектом изделия, в группе для каждого сигнала определяют разность фаз между сигналами, зарегистрированными преобразователями, по которым определяют угол, характеризующий направление распространения волны, при этом определяют расстояние до дефекта по времени нарастания переднего фронта волны, а координаты дефекта определяют по определенным математическим выражениям. Технический результат: определение координат источника АЭ с использованием минимального количества приемных преобразователей при ограниченном доступе к объекту контроля при сохранении точности локации дефектов. 3 ил., 2 табл.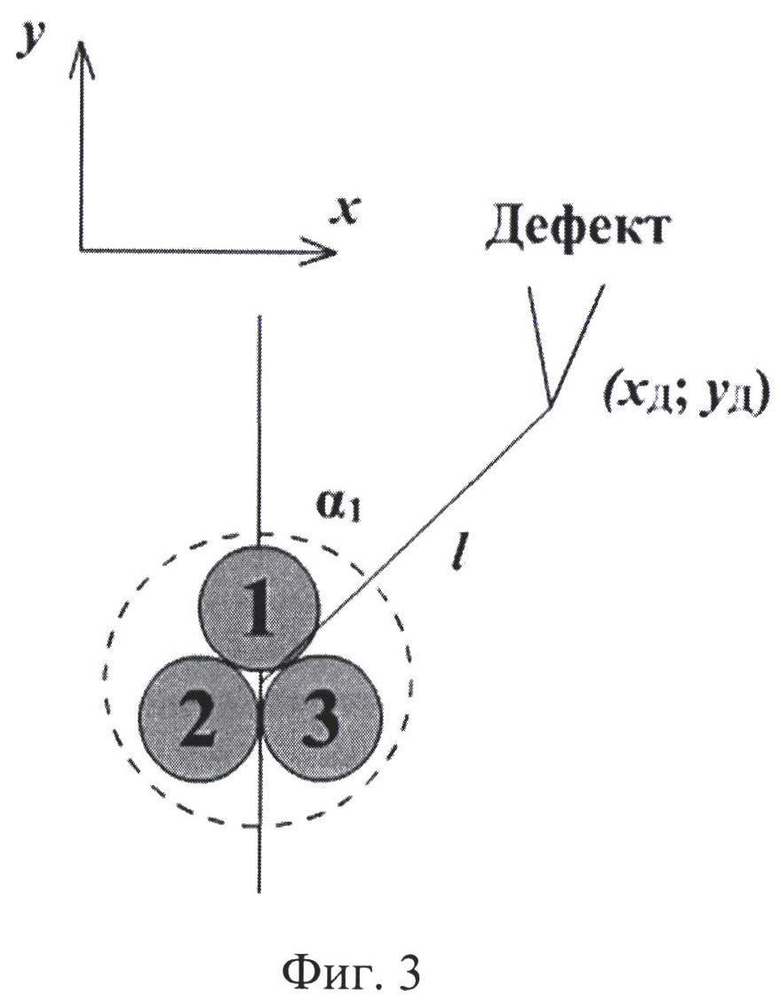
Способ определения координат дефектов при акустико-эмиссионном контроле, заключающийся в том, что на контролируемом изделии устанавливают группу преобразователей акустической эмиссии на расстоянии между центрами преобразователей, не превышающем минимальной длины акустической волны, в группе для каждого сигнала определяют разность фаз между сигналами, зарегистрированными преобразователями, по которым определяют угол, характеризующий направление распространения волны, изделие нагружают, принимают сигналы акустической эмиссии, генерируемые дефектом изделия, отличающийся тем, что на изделие устанавливают не менее трех преобразователей акустической эмиссии и определяют расстояние до дефекта по времени нарастания переднего фронта волны, а координаты дефекта определяют по формулам:
xд=l⋅cosα1;
yд=l⋅sinα1;
где l - расстояние от группы преобразователей до дефекта, мм;
sinα1 и cosα1 - синус и косинус угла направления распространения волны в группе преобразователей.
| СПОСОБ ЛОКАЦИИ ДЕФЕКТОВ ПРИ АКУСТИКО-ЭМИССИОННОМ КОНТРОЛЕ | 2015 |
|
RU2586087C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФЕКТОВ В СТРУКТУРЕ ДЕТАЛЕЙ | 2009 |
|
RU2398225C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ПРЕОБРАЗОВАТЕЛЕМ И ИСТОЧНИКОМ АКУСТИЧЕСКОЙ ЭМИССИИ | 2007 |
|
RU2397490C2 |
| Акустико-эмиссионное устройство для определения координат дефектов | 1982 |
|
SU1080078A1 |
| US 6065342 A, 23.05.2000 | |||
| US 3985024 A, 12.10.1976. | |||

