Изобретение относится к машиностроению, в частности к конструкции беззазорных приводов, преимущественно для поворотных узлов манипулято- ров.
Цель изобретения - повышение точности позиционирования, при одновременном улучшении динамических характеристик за счет обеспечения выбора люфтов в кинематических цепях планетарного зубчатого привода.
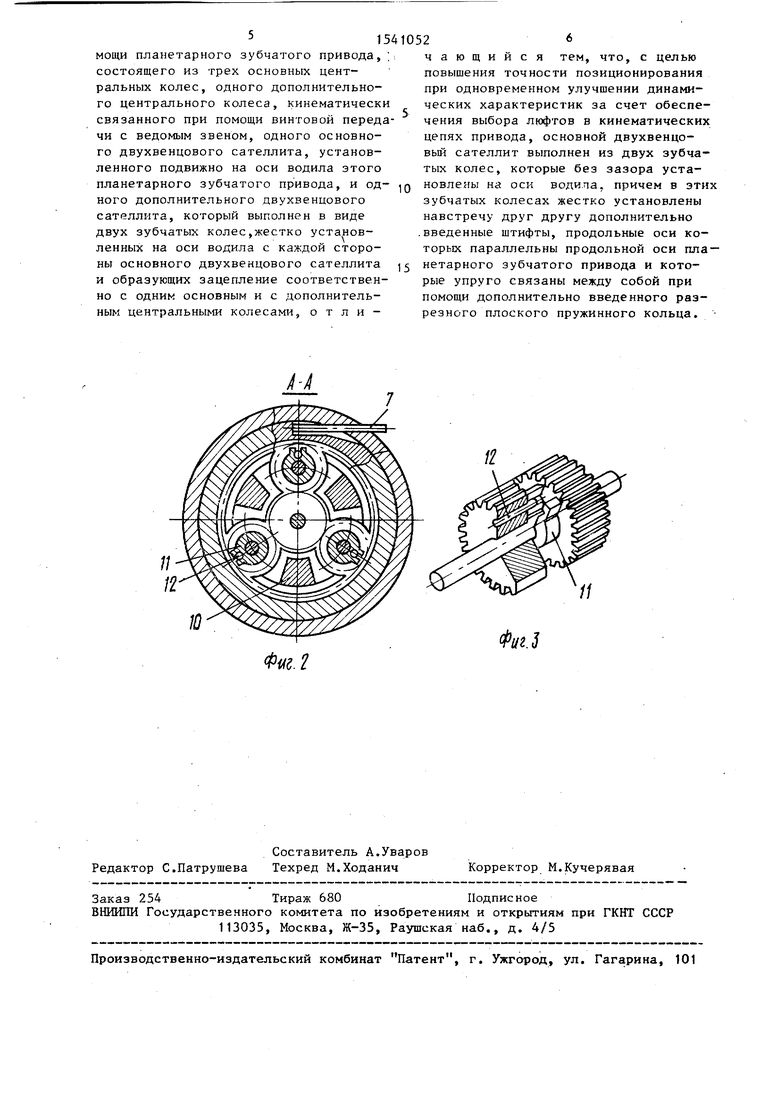
На фиг.1 показан шаринр манипулятора, разрез; на фиг.2 - разрез А-А на фиг.1; на фиг.З - пружинная связь между зубчатыми венцами разрезного сателлита.
Шарнир манипулятора содержит ведомое звено 1, ведущее звено 2,. шар- нирно связанные при помощи подтип- никовых опор 3. В звене 1 и звене 2 установлены центральные колеса 4 и 5. Кроме того,в звене 1 с возможностью поворота установлено дополнительное центральное колесо 6 и меха- низм выборки люфтов, выполненный в виде винтовой передачи 7 и взаимодействующий с дополнительным центральным колесом 6. С центральными колесами 4 и 5 зацепляется основ- ной двухвенцовый сателлит 8. Коак- сиально основному сателлиту 8 установлен дополнительный двухвенцовый сателлит 9, взаимодействующий с центральным колесом 4 и дополнительным центральным колесом 6„ Дополнительный двухвенцовый сателлит 9 установлен в подшипниковых опорах водила 10. Водило 10 установлено в подшипниковых опорах подвижного звена 1 и неподвижного звена 2. Один из двухвенцовых сателлитов (например, основной 8) на каждой оси водила 10 выполнен составным из двух отдельных зубчатых колес, связанных между собой пружиной 11 посредством дополнительно введенных штифтов 12. В звене 2 установлен двигатель 13, на валу которого установлено третье центральное колесо 14, взаимодействующее с основным двухвенцовым сателлитом 8.
Привод манипулятора работает следующим образом.
Перед работой привода для улучшения динамических и точностных характеристик необходимо устранить зазоры в кинематической цепи привода.Для этого, с помощью винтовой передачи
„
0
7, осуществляется поворот дополнительного центрального колеса 6. Это колесо увлекает за собой дополнителы ный двухвенцовый сателлит 9, который взаимодействуя с центральным колесом 4, вызывает поворот водила 10. Поворот водила 10 происходит до тех пор, пока не выбраны боковые зазоры в зубчатых зацеплениях одного из основных двухвенцовых сателлитов 8 с центральными колесами 4 и 5. При этом зубья венцов основного и дополнительного сателлитов 8 и 9 находятся в контакте с зубья ми центрального колеса 4, а также центральных колес 5 и 6 с разных сторон. Это обеспечивает отсутствие люфтов в зубчатых зацеплениях колес одной из осей водила 10. В остальных зацеплениях люфты еще не выбраны из- за погрешностей изготовления зубчатых передач (неравномерный боковой зазор). Если с помощью винтовой передачи 7 продолжить поворот дополнительного центрального колеса 6, то, так как боковоей зазор в зацеплениях колес одной из осей водила полностью выбран, начнет происходить разворот одного вениа основного двухвенцового сателлита 8 отно- сильно другого и будет закручиваться связывающая их пружина 11. При этом произойдет выборка боковых зазоров в зацеплениях колес остальных осей водила 10, а также радиальных зазоров в подшипниковых опорах осей всех сателлитов. Боковые зазоры в зацеплении центрального колеса 14 с основными сателлитами 8 остаются не выбранными. Но эти зазоры не оказывают существенного влияния на люфт звена 2, так как они находятся на входной ступени привода.
Использование разрезных подпружиненных двухвенцовых сателлитов позволяет полностью выбрать люфты практически во всех зацеплениях при реверсе передачи, повышает ее плавность, надежность и долговечность, так как за счет пружин компенсируется разнотолщинность зубьев зубчатых колес.
Формула изобретения
Шарнир манипулятора, содержащий ведущее и ведомое звенья, кинематически связанные между собой при помощи планетарного зубчатого привода, ; состоящего из трех основных центральных колес, одного дополнительного центрального колеса, кинематически связанного при помощи винтовой передачи с ведомым звеном, одного основного двухвенцового сателлита, установленного подвижно на оси водила этого планетарного зубчатого привода, и одного дополнительного цвухвенцового сателлита, который выполнен в виде двух зубчатых колес,жестко установленных на оси водила с каждой стороны основного двухвенцового сателлита и образующих зацепление соответственно с одним основным и с дополнительным центральными колесами, о т л и 0
повышения точности позиционирования при одновременном улучшении динамических характеристик за счет обеспечения выбора люфтов в кинематических цепях привода, основной двухвенцо- вый сателлит выполнен из двух зубчатых колес, которые без зазора установлены на оси водипа. причем в этих зубчатых колесах жестко установлены навстречу друг другу дополнительно .введенные штифты, продольные оси которых параллельны продольной оси планетарного зубчатого привода и которые упруго связаны между собой при помощи дополнительно введенного разрезного плоского пружинного кольца.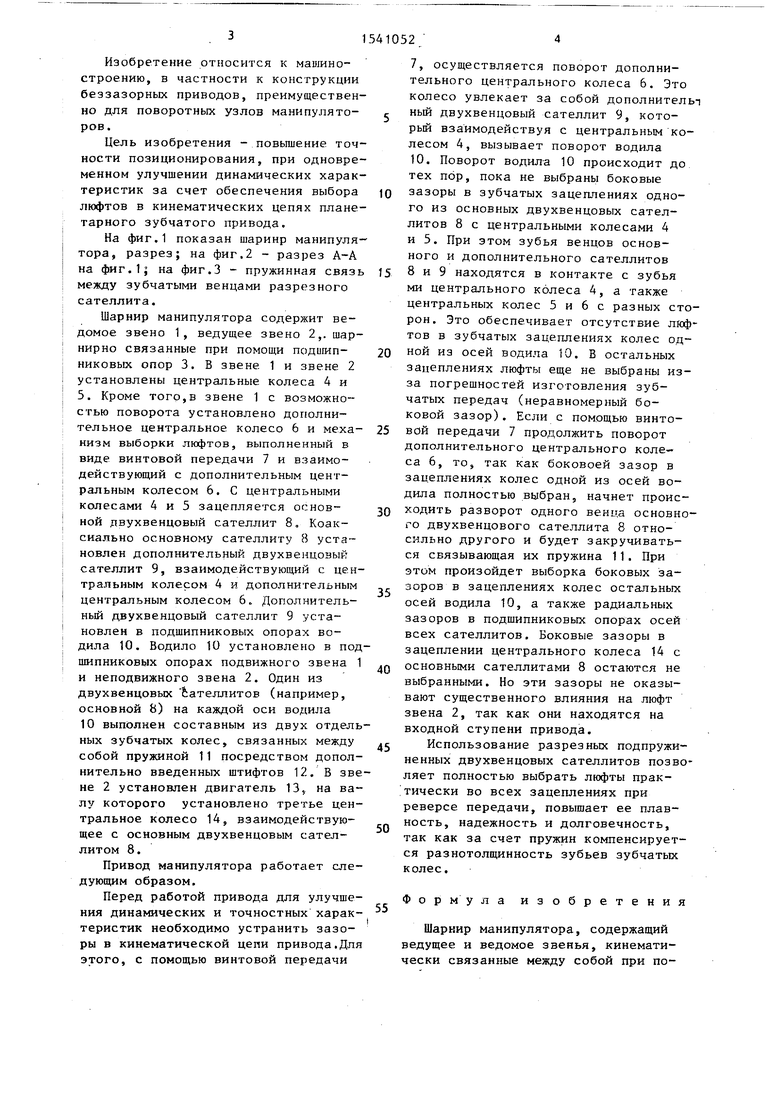
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод манипулятора | 1980 |
|
SU905066A1 |
| ШАРНИР МАНИПУЛЯТОРА С РЕГУЛИРУЕМОЙ БЕЗЗАЗОРНОЙ ЗУБЧАТОЙ ПЕРЕДАЧЕЙ (ВАРИАНТЫ) | 2012 |
|
RU2497658C1 |
| МЕХАНИЗМ ПОДЪЕМА | 2018 |
|
RU2692323C1 |
| Планетарная передача с выборкой зазоров | 1987 |
|
SU1537934A1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С УСТРОЙСТВОМ НЕЙТРАЛИЗАЦИИ РАДИАЛЬНОЙ НАГРУЗКИ ОТ КОНТАКТИРУЮЩИХ ЗУБЬЕВ | 2017 |
|
RU2668451C1 |
| БЕЗЗАЗОРНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 1996 |
|
RU2101588C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2333404C1 |
| ГРУЗОВАЯ ЛЕБЕДКА | 1994 |
|
RU2081053C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ВСТРАИВАЕМЫЙ ЗУБЧАТЫЙ МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ КРУТЯЩЕГО МОМЕНТА, ПРЕОБРАЗОВАТЕЛЬ КРУТЯЩЕГО МОМЕНТА И ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ | 2012 |
|
RU2510696C2 |
| Устройство для преобразования вращательного движения в возвратно-поступательное | 1979 |
|
SU911071A1 |
Изобретение относится к машиностроению, в частности к конструкции беззазорных приводов для поворотных узлов манипуляторов. Целью изобретения является повышение точности позиционирования при одновременном улучшении динамических характеристик за счет обеспечения выбора люфтов в кинематических цепях планетарного зубчатого привода. При повороте дополнительного двухвенцового сателлита 9 поворачивается водило 10. Поворот водила 10 происходит до тех пор, пока не выбраны боковые зазоры в зубчатом зацеплении одного из колес основных двухвенцовых сателлитов 8. При дальнейшем повороте водила 10 происходит разворот одного венца основного двухвенцового сателлита 8 относительно другого и закручивается пружина 11, упруго связывающая эти венцы при помощи дополнительно введенных штифтов 12. 3 ил.
ю
Фиг. 2
//
Фиг.З
| Привод манипулятора | 1980 |
|
SU905066A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
