(54) ПРИВОД МАНИПУЛЯТОРА

| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнир манипулятора | 1988 |
|
SU1541052A1 |
| Устройство для преобразования вращательного движения в возвратно-поступательное | 1979 |
|
SU911071A1 |
| Устройство для преобразования вращательного движения в поступательное | 1978 |
|
SU769153A1 |
| МЕХАНИЗМ ПОВОРОТА | 2007 |
|
RU2340544C1 |
| Инерционный нагружатель | 1988 |
|
SU1618461A1 |
| УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) | 2006 |
|
RU2307278C1 |
| Привод клети стана холодной прокатки труб | 1979 |
|
SU884761A1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ДЛЯ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2156902C1 |
| Стенд усталостных испытаний | 1989 |
|
SU1758486A1 |
| ПОРШНЕВАЯ МАШИНА | 1996 |
|
RU2115805C1 |
1
Изобретение относится к машиностроению или более конкретно к конструкции приводов манипуляторов.
Известен привод манипулятора, содержащий корпус, рычаг, двигатель с планетарным редуктором, состоящим из трех центральных колес и основного двухвенцевого сателлита, один венец которого взаимодействует с первым центральным колесом, установленным в корпусе, а другой венец - со вторым центральным колесом, установленным в рычаге, а третье центральное колесо установлено на валу двигателя 1.
Недостатками этого привода манипулятора являются низкие точностные и динамические характеристики вследствие наличия люфтов в кинематической цепи планетарного редуктора.
Цель изобретения - улучшение динамических и точностных характеристик привода манипулятора.
Поставленная цель достигается тем, что привод манипулятора снабжен механизмом разворота, дополнительным центральным колесом и дополнительным двухвенцовым сателлитом, причем дополнительный двухвенцовый сателлит установлен коаксиально основному двухвенцовому сателлиту и кинематически связан с центральными колесами, кроме того, механизм разворота взаимодействует с дополнительным центральным ко лесом, при этом дополнительное центральное колесо и механизм разворота установлены в корпусе, а дополнительный двухвенцовый сателлит взаимодействует одним своим венцом со вторым центральным колесом, 10 а другим венцом - с дополнительным центральным колесом.
Дополнительное центральное колесо и механизм разворота установлены в рычаге, а дополнительный двухвенцовый сателлит взаимодействует одним своим венцом с допол15нительным центральным колесом, а вторым- с первым и третьим центральными колесами.
Механизм разворота выполнен в виде винтовой передачи.
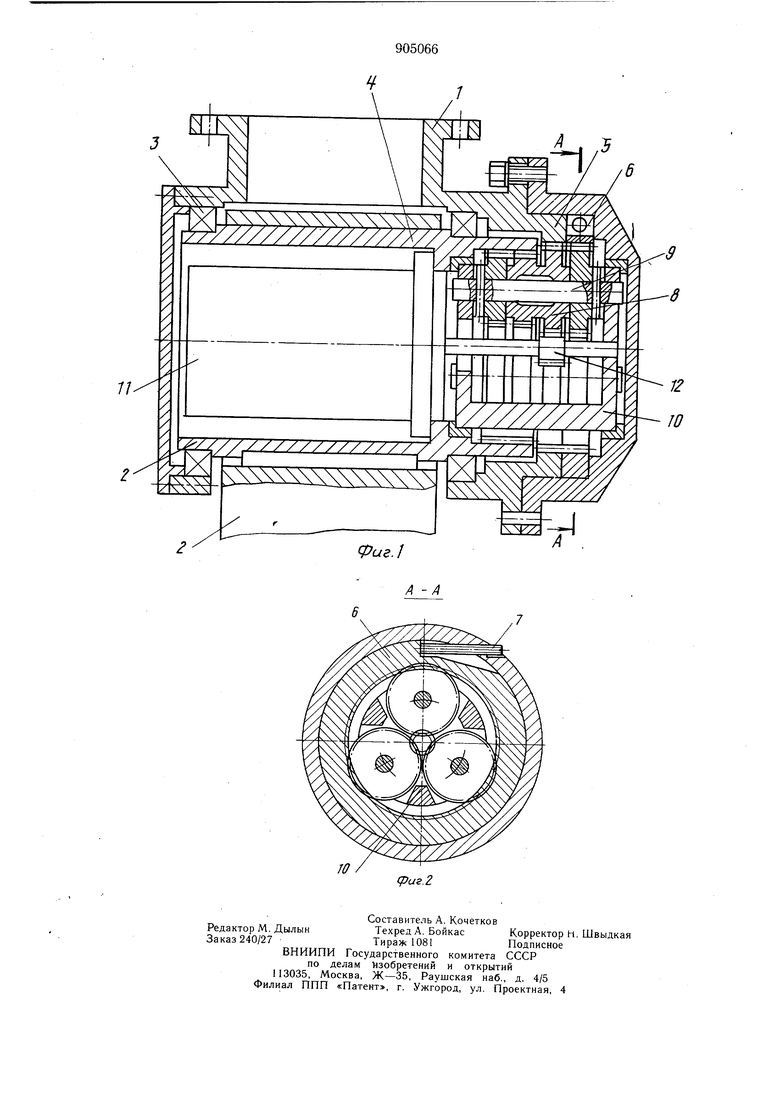
На фиг. 1 изображен привод манипуля20тора, разрез; на фиг. 2 - разрез А-А на фиг. 1.
Привод манипулятора содержит корпус 1, рычаг 2, установленный на подшипниковых опорах 3. В корпусе 1 и рычаге 2 установлены центральные колеса 4 и 5. Кроме того, в корпусе 1 с возможностью поворота установлено дополнительное центральное колесо 6 и механизм разворота, выполненный в виде винтовой передачи 7 и взаимодействующий с дополнительным центральным колесом 6. С центральными колесами 4 и 5 зацепляется основной двухвенцовый сателлит 8. Коаксиально основному установлен дополнительный двухвенцовый сателлит 9, взаимодействующий с центральным колесом 4 и дополнительным центральным колесом 6. Дополнительный двухвенцовый сателлит установлен в подшипниковых опорах водила 10. Водило 10 установлено в подшипниковых опорах корпуса 1 и рычага 2. В рычаге 2 установлен двигатель 11, на валу которого установлено третье центральное колесо 12, взаимодействующее с основным двухвенцовым сателлитом 8. Возможен вариант размещения дополнительного центрального колеса и механизма разворота в корпусе, когда дополнительный двухвенцовый сателлит взаимодействует одним своим венцом со вторым центральным колесом, а другим венцом - с дополнительным центральным колесом, а также, когда дополнительное центральное колесо с механизмом разворота -установлено в рычаге, а дополнительный двухвенцовый сателлит взаимодействует одним своим венцом с дополнительным центральным колесом, а вторым - с первым и третьимцентральными колесами.
Привод манипулятора работает следующим образом.
Перед работой привода для улучшения динамических и точностных характеристик необходимо устранить зазоры в кинематической цепи редуктора, это осуществляется следующим образом. С помощью винтовой передачи 7 осуществляется поворот дополнительного центрального колеса 6. Это колесо увлекает за собой дополнительный двухвенцовый сателлит 9, который, взаимодействуя с центральным колесом 4, вызывает поворот водила 10. Поворот водила 10 происходит до тех пор, пока не выбраны боковые зазоры в зубчатых зацеплениях основного двухвенцового сателлита 8 с центральными колесами 4 и 5, а также радиальные зазоры в подшипниковых опорах основного сателлита 8. При это.м зубья венцов основного и дополнительного сателлитов 8 и 9 находятся в контакте с зубьями центрального колеса 4, а также центральных колес 5 и 6
с разных сторон. Это обеспечивает отсутствие люфта при реверсе передачи. Боковые зазоры в зацеплении центрального колеса 12 с основным сателлитом 8 остаются невыбранными. Но эти зазоры не оказывают существенного влияния на люфт рычага 2, так как они передаются к нему уменьшенными в i раз, где i - передаточное число ;.)едуктора.
Формула изобретения
колес и основного двухвенцового сателлита, один венец которого взаимодействует с первым центральным колесом, установленным в корпусе, а другой венец - со вторым центральным колесом, установленным в рычаге, а третье центральное колесо установлено на валу двигателя, отличающийся те.м, что, с целью улучшения динамических и точностных характеристик, он снабжен механизмом разворота, дополнительным центральным колесом и дополнительным двухJ венцовым сателлитом, причем дополнительный двухвенцовый сателлит установлен коаксиально основному двухвенцовому сателлиту и кинематически связан с центральными колесами, кроме того, механизм разворота взаимодействует с дополнительным
° центральным колесом.
J взаимодействует одним своим венцо.м со вторым центральным колесом, а другим венцом - с дополнительным центральным/колесом.
j колесами.
Источники информации, принятые во внимание при экспертизе 0 1. Патент ФРГ № 1164057, кл. 35 в 6/25, опублик. 1964.
