ел
Ј 00 4ь СП СП
| название | год | авторы | номер документа |
|---|---|---|---|
| Система мерного реза изделия | 1989 |
|
SU1653915A2 |
| Устройство для контроля систем программного управления станком | 1988 |
|
SU1580320A1 |
| Устройство для регулирования скорости движения позиционирующего механизма | 1985 |
|
SU1278965A1 |
| Устройство для моделирования процесса передачи информации | 1989 |
|
SU1777149A1 |
| Устройство для формирования прямоугольных импульсов | 1984 |
|
SU1211857A1 |
| Устройство для централизованного контроля параметров | 1984 |
|
SU1238040A1 |
| Устройство для ввода информации | 1983 |
|
SU1149270A1 |
| Устройство для управления скоростью движения позиционирующего механизма | 1987 |
|
SU1515198A1 |
| Устройство для сглаживания периодических случайных сигналов | 1983 |
|
SU1242987A2 |
| Устройство для перезапуска вычислительного комплекса при обнаружении сбоя | 1988 |
|
SU1541608A1 |
Изобретение относится к вычислительной технике, а именно к механизмам, обеспечивающим перемещение преобразователей записи и воспроизведения внешних запоминающих устройств ЭВМ с дисковыми носителями информации. Изобретение позволяет устранить сбои позиционирующего механизма. Нулевая комбинация выходного числа счетчика 6 дешифрируется дополнительным дешифратором 11, на выходе которого устанавливается уровень, закрывающий схему 4 совпадения, что запрещает прохождение импульсов генератора 2 на вычитающий вход счетчика 6 и его переполнение. 1 ил.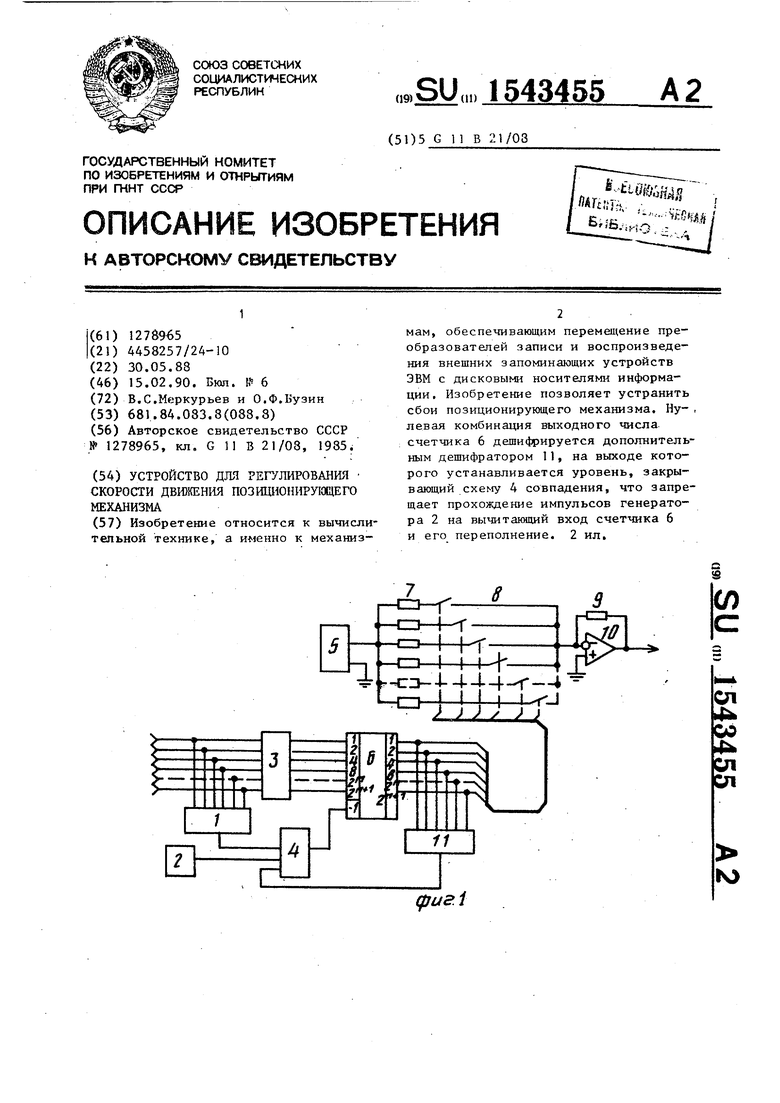
К
фиа1
Изобретение относится к вычисли- ыльной технике, а именно к механизам, обеспечивающим перемещение пребразователей записи и воспроизведе- ня (ПЗВ) внешних запоминающих уст- йств ЭВМ с дисковыми носителями инормации является усовершенствоваием устройства по авт.св. № 1278965,
Целью изобретения является устра- 10 Јние сбоев позиционирующего меха- за счет исключения возможности переполнения вычитающего счетчика на онечном интервале перемещения ПЗВ, вызывающего Искажение сигнала управ- 15 ния скоростью.
На фиг. 1 приведена функциональная с|сема; на фиг, 2 - временные диаграммы, поясняющие его работу.
Устройство содержит дешифратор 1, 20 генератор 2 импульсов, преобразова- тЫ1ь 3 кода, схему 4 совпадения, ис- тЬчник 5 опорного напряжения, вычитающие счетчик 6, весовые резисторы 7, коммутирующие элементы 8, резис- 25 трр 9 обратной связи, операционный усилитель 10, дополнительный дешифратор 11.
Устройство предназначено для30
формирования сигнала управления скоростью при позиционировании ПЗВ, Фор- м|ируемый на выходе преобразователя 3 код числа управления скоростью пере- п 1сывается в счетчик 6 каждым позиционным импульсом счета до момента срабатывания дешифратора 1, на выходе Которого устанавливается уровень, разрешающий прохождение импульсов генератора 2 через схему совпадения 4 на вычитающий вход счетчика 6, в результате чего содержимое счетчика уменьшается (по каждому импульсу ге- йератора 2 на единицу веса) в течение времени до новой перезаписи вы- ходного числа преобразователя 3 в м|:четчик 6. Таким образом, после включения дешифратора -1 значение цифрового кода управления скоростью в промежутках между позициями интерполиру- ется. В конце позиционного перемещения механизма напряжение сигнала управления скоростью на выходе операционного усилителя 10 должно снизиться до нулевого значения, что обеспе- чивается уменьшением выходного кода числа счетчика 6 до нуля на последнем интерполируемом позиционном интервале.
35
0 5
0 5
0
5
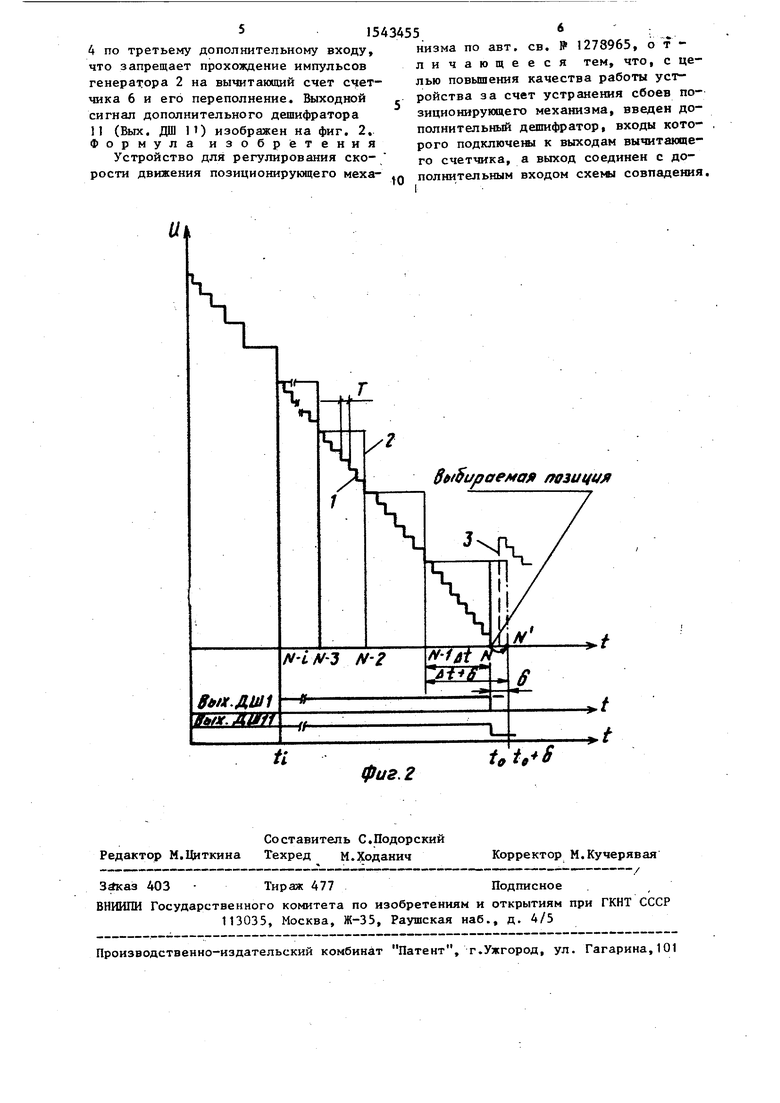
Кривая (фиг. 2) характеризует форму сигнала управления скоростью устройства-прототипа на выходе операционного усилителя 10. (Для наглядности на фиг. 2 показана кривая 2, характеризующая перепады напряжения в сигнале управления скоростью без их интерполяции). Интерполяция начинается с момента времени установления на выходе дешифратора 1 уровня, разрешающего прохождение импульсов тактового генератора на вычитающий вход счетчика 6, в результате чего счетчик обнуляется и напряжение сигнала управления скоростью падает до нуля. При этом поступление импульсов тактового генератора на вход счетчика 6 запрещается выходным уровнем дешифратора 1, устанавливающимся нулевой числовой комбинацией на выходе преобразователя 3 кодов.
Занесение исходного цифрового кода сигнала управления скоростью осуществляется в точках пересечения (счета) позиций , , N, при движении позиционирующего механизма. Время перемещения позиционирующего механизма на последнем позиционном интервале от предпоследней (N.,) до выбираемой (N) позиции вследствие возможного уменьшения значения действительной скорости перемещения увеличивается по сравнению с требуемым номинальным на величину (рассматривается случай, когда (), что приводит к смещению времени выборки последней позиции N на «Г (отмечено на временной оси фиг. 2 позицией N ) и блокированию тактового генератора только после переполнения вычитающего счетчика 6. (Следующий за устанавливающим счетчик 6 в нулевое состояние импульс изменяет содержимое счетчика на про- тивоположное, т.е. записывает единицы во все его разряды). При этом в сигнал управления скоростью перемещения ПЗВ вносятся искажения, приводящие к сбоям позиционирующего механизма. На фиг. 2 эти искажения сигнала управления скоростью в области выбираемой позиции обозначены цифрой 3. Устранение переполнения счетчика 6 обеспечивается дополнительным дешифратором 11, с помощью которого дешифрируется нулевая комбинация выходного числа счетчика 6. При этом на выходе дешифратора 11 устанавливается уровень, закрывающий схему совпадения
5154
4 по третьему дополнительному входу, что запрещает прохождение импульсов генератора 2 на вычитающий счет счетчика 6 и его переполнение. Выходной сигнал дополнительного дешифратора 11 (Вых. ДШ П) изображен на фиг. 2. Формула изобретения Устройство для регулирования скорости движения позиционирующего меха
Ъ
низма по авт. св. № 1278965, отличающееся тем, что, с целью повышения качества работы устройства за счет устранения сбоев позиционирующего механизма, введен дополнительный дешифратор, входы которого подключены к выходам вычитающего счетчика, а выход соединен с дополнительным входом схемы совпадения.
вбираемая позиция
фиг. 2
Ut,+ 6
| Устройство для регулирования скорости движения позиционирующего механизма | 1985 |
|
SU1278965A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
