Л/Х
ел
У1
00
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ магнитной записи асинхронных потоков цифровой информации и устройство для его осуществления | 1990 |
|
SU1788520A1 |
| Устройство отсчета интервалов времени | 1982 |
|
SU1103228A1 |
| Устройство слежения за дорожкой дискового носителя информации | 1987 |
|
SU1614031A1 |
| Устройство для регулирования скорости лентопротяжного механизма | 1988 |
|
SU1501002A1 |
| Аналого-цифровой преобразователь с коррекцией погрешности | 1988 |
|
SU1688473A1 |
| Устройство управления для селекторного канала | 1984 |
|
SU1238095A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365965C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365963C2 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕНИЯ ЦВМ С КАНАЛОМ СВЯЗИ | 1991 |
|
RU2011217C1 |
| Вычислительное устройство для формирования маршрута сообщения | 1982 |
|
SU1037269A1 |
Изобретение относится к устройствам формирования сигналов для управления скоростью движения позиционирующего механизма. Цель изобретения - повышение точности позиционирования. Для достижения цели в устройство, содержащее блок 1 счета разности, задатчик 2 скорости и цифроаналоговый преобразователь 3, введены блок 4 коррекции и аналоговый сумматор 5. Выполнение блока 1 счета разности и задатчика 2 скорости на элементах дискретной техники обеспечивает формирование управляющего напряжения ступенчатой формы и корректирующего кода, под действием которого в блоке 4 коррекции формируется линейно-нарастающее или линейно-падающее напряжение, которое складываясь в аналоговом сумматоре 5 с управляющим напряжением, позволяет оптимизировать управляющий сигнал. 4 ил.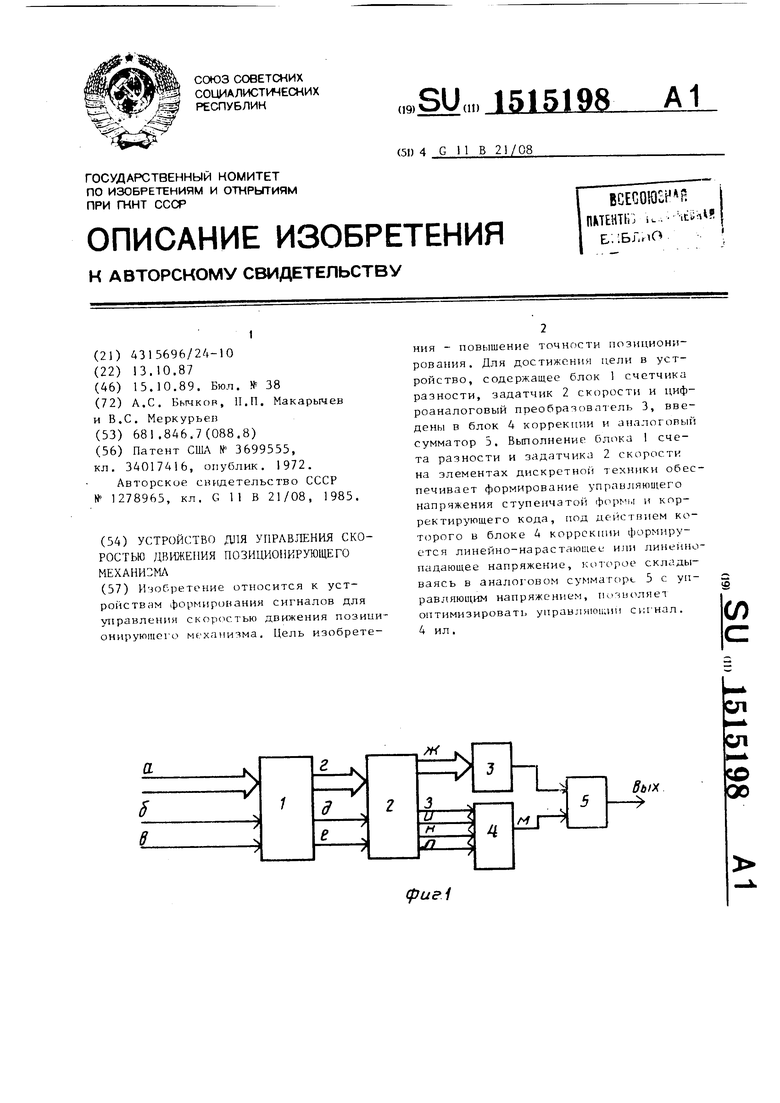
(риг1
Изобретение относится к технике накопления информации, а именно к устройствам формирования сигнала управления скоростью позиционирования .
Цель изобретения - повышение точности позиционирования за счет оптимизации формы сигнала управления скоростью перемещения позиционера.
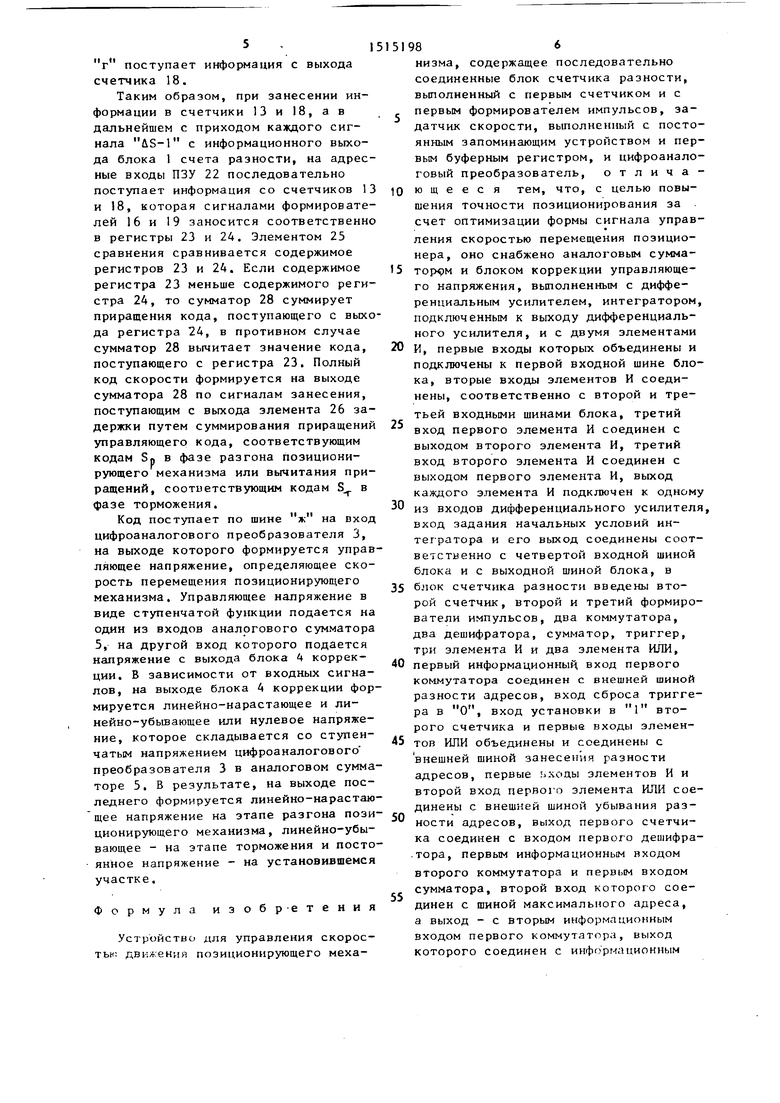
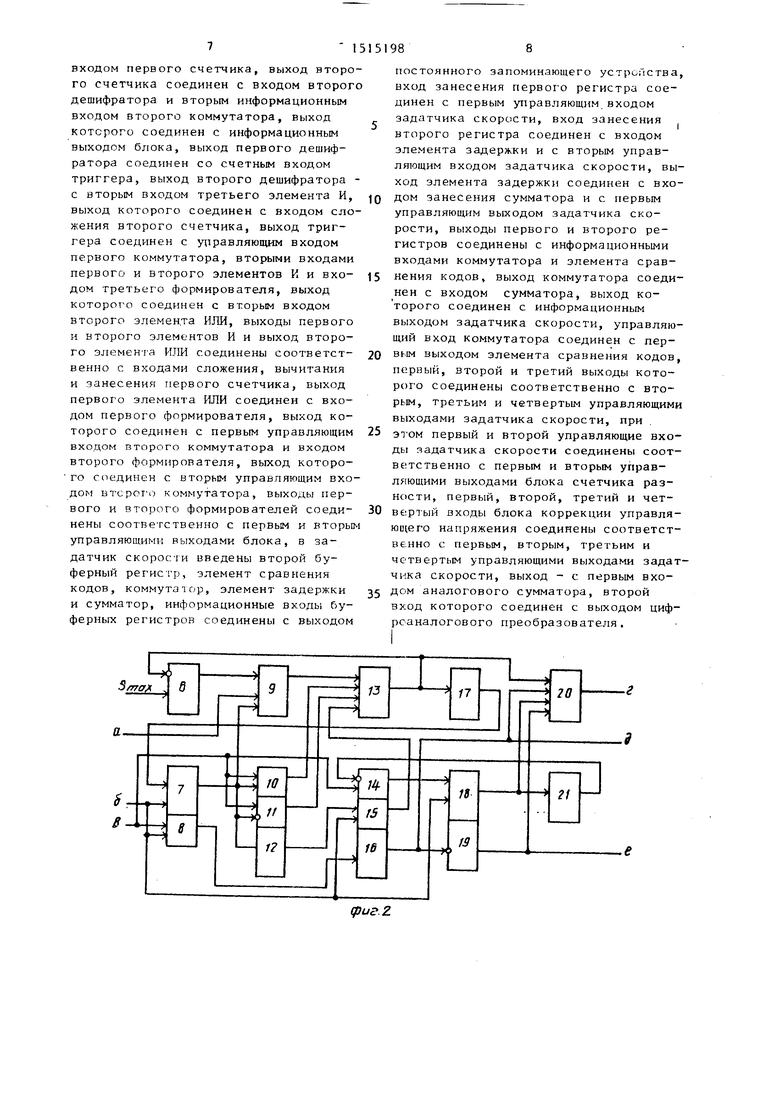
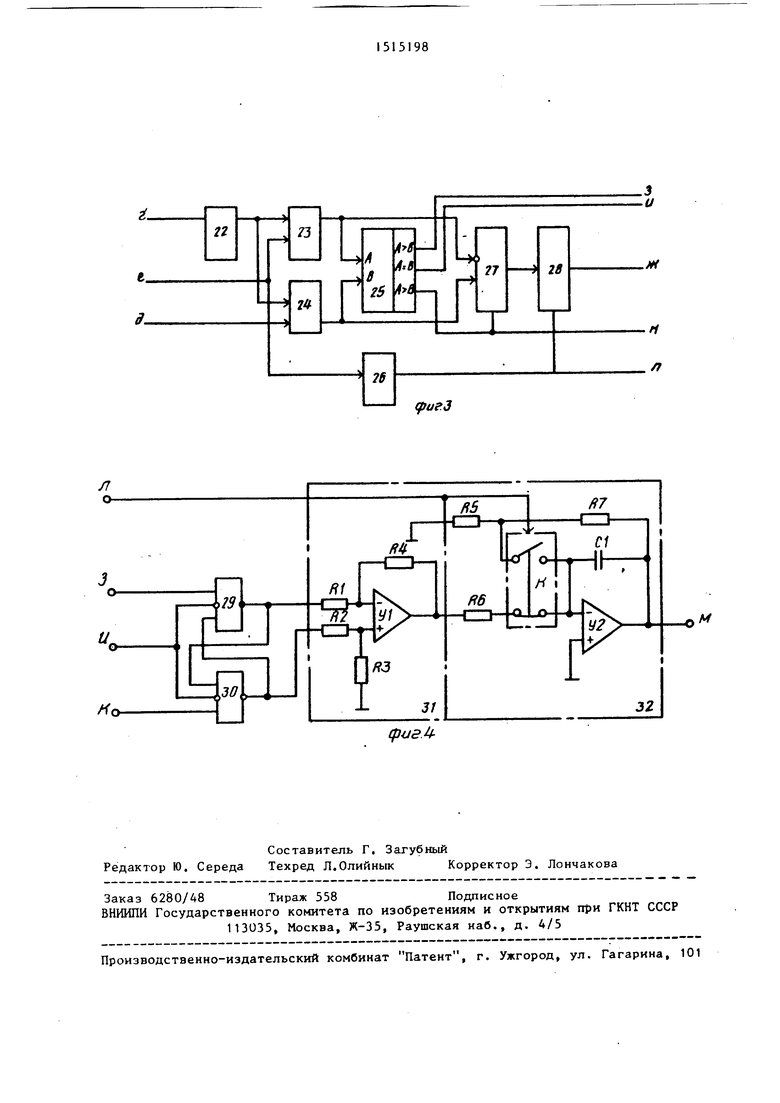
На фиг. 1 представлена структурна схема предлагаемого устройства; на фиг. 2 - функциональная схема блока счета разности; на фиг. 3 - функциональная схема задатчика скорости перемещения; на фиг. 4 - функциональная схема блока коррекции напряжения
Устройство содержит блок 1 счета разности, задатчик 2 скорости перемещения, цифроаналоговый преобразователь 3, блок 4 коррекции управляющег напряжения и аналоговый сумматор 5.
Блок 1 счета разности выполнен в виде суммятора 6, триггера 7, элемента ИЛИ 8, коммутатора 9, элементо И 10 и 11, формирователя 12, счетчика 13, элемента И 14, элемента ИЛИ 15, формирователя 16, дешифратора 17 счетчика 18, формирователя 19, коммутатора 20 и дешифратора 21,
Задатчик 2 скорости перемещения выполнен в виде постоянного запоминающего устройства (ПЗУ) 22, регистров 23 и 24, элемента 25 сравнения, элемента 26 задержки, коммутатора 27 и сумматора 28.
Блок 4 коррекции управляющего напряжения содержит элементы И 29 и 30, дифференциальный усилитель 31 и интегратор 32.
Устройство работает следующим образом.
Устройство управления накопителем подает на шину а код US, соответствующий разности адресов текущей и требуемой дорожки, (зоны) и на шину б импульсный сигнал Занесение Д5 под действием которого триггер 7 сбрасывается в ноль и информация с шины а через коммутатор 9 заносится в счетчик 13 сигналом с выхода элемента ИЛИ 15, а счетчик 18 устанавливается н единицу.
Если ПС1 сигналу Зан сение ЛЗ в счетчик 13 заносится код ЛS 0, 5uS ц«-,кс , на вых(1де дешифратора 17 формируется единичный сигнал, который переводит триггер 7 в единич
5198-1
ное состояние. При этом на вхои счетчика 13 через коммутатор 9 с выхода сумматора 6 поступает код ,
, который заносится и счетчик 13 под действием сигнала, поступающего на его вход занесения через элемент ИЛИ 15 с выхода формирователя 12, запускаемого по переднему фронту вы10 ходного сигнала триггера 7. Таким образом, в начальный момент позиционирования в счетчик 18 заносится код SP 1, а в счетчик 13 - код , если U StO,5S, . Если и ,
15 то Б счетчик 13 заносится код
S
макс
-ДЗ и при этом изменяется на0
5
0
5
0
5
0
5
правление счета счетчика 13, необходимость этого, обусловлена тем, что ПЗУ 22 содержит данные не на полный профиль формируемого сигнала скорости, а лишь на 1/2 часть его.
При пересечении головкой записи/ воспроизведения очередной информационной дорожки (зоны) на вход в блока 1 счета разности поступают счетные сигналы US-l, которые увеличивают на единицу содержимое счетчика 18 и в зависимости от состояния триггера 7 увеличивают или уменьшают содержимое счетчика 13. Счетные импульсы подаются на входы счетчика через элемент И 10 или элемент И II соответственно. Если содержимое счетчика 13 станет равньм выходе дешифратора 21 появится единичный уровень, который через элемент И 14 блокирует дальнейшее прохождение счетных импульсов на вход счетчика 18 с целью исключения превышения максимального адреса ПЗУ 22.
Таким образом, при работе устройства счетчик 13 формирует коды, соответствующие текущей разности адресов между настоящим и требуемым положением головки записи/воспроизведения. Счетчик 18 выдает коды Sp
1231 /74
I , Z., J, . . . I / :й д с
Сигналы Занесение ЛЗ и /.5-Г через элемент ИЛИ 8 запускают формирователь 16, на выходе которого формируется импульс, в течении которого через коммутатор 20 на выход г блока 1 счета разности поступает информация с выхода счетчика 13. Задним фронтом сигнала формирователя 16 запускается формирователь 19, на выходе которого формируется импульс в течении которого на выход
5 I
г поступает информация с выхода счетчика 18.
Таким образом, при занесении информации в счетчики 13 и 18, а в дальнейшем с приходом каждого сигнала Л5-1 с информационного выхода блока 1 счета разности, на адресные входы ПЗУ 22 последовательно поступает информация со счетчиков 13 и 18, которая сигналами формирователей 16 и 19 заносится соответственно в регистры 23 и 24. Элементом 25 сравнения сравнивается содержимое регистров 23 и 24. Если содержимое регистра 23 меньше содержимого регистра 24, то сумматор 28 суммирует приращения кода, поступающего с вько да регистра 24, в противном случае сумматор 28 вычитает значение кода, поступающего с регистра 23. Полный код скорости формируется на выходе сумматора 28 по сигналам занесения, поступающим с выхода элемента 26 задержки путем суммирования приращений управляющего кода, соответствующим кодам SP в фазе разгона позиционирующего механизма или вычитания приращений, соотиетствующим кодам S в фазе торможения.
Код поступает по шине ж на вход цифроаналогового преобразователя 3, на выходе которого формируется управляющее напряжение, определяющее скорость перемещения позиционирующего механизма. Управляющее напряжение в виде ступенчатой функции подается на один из входов аналогового сумматора 5, на другой вход которого подается напряжение с выхода блока 4 коррекции. В зависимости от входных сигналов, на выходе блока 4 коррекции формируется линейно-нарастающее и ли- нейно-убьшающее или нулевое напряжение, которое складывается со ступенчатым напряжением цифроаналогового преобразователя 3 в аналоговом сумматоре 5. В результате, на выходе последнего формируется линейно-нарастающее напряжение на этапе разгона позиционирующего механизма, линейно-убывающее - на этапе торможения и постоянное напряжение - на установившемся участке.
Формула изоб р-е тения
Устройство для управления скорос- тьн: движения позиционирующего меха
10
15
20
25
30
35
40
45
50
55
986
низма, содержащее последовательно соединенные блок счетчика разности, выполненный с первым счетчиком и с первым формирователем импульсов, за- датчик скорости, выполненный с постоянным запоминающим устройством и первым буферным регистром, и цифроанало- говый преобразователь, отличающееся тем, что, с целью повышения точности позиционирования за счет оптимизации формы сигнала управления скоростью перемещения позиционера, оно снабжено аналоговым сумма- и блоком коррекции управляющего напряжения, выполненным с дифференциальным усилителем, интегратором, подключенным к выходу дифференциального усилителя, и с двумя элементами И, первые входы которых объединены и подключены к первой входной шине блока, вторые входы элементов И соединены, соответственно с второй и третьей входными шинами блока, третнй вход первого элемента И соединен с выходом второго элемента И, третий вход второго элемента И соединен с выходом первого элемента И, выход каждого элемента И подключен к одному из входов дифференциального усилителя, вход задания начальных условий интегратора и его выход соединены соответственно с четвертой входной шиной блока и с выходной шиной блока, в блок счетчика разности введены второй счетчик, второй и третий формирователи импульсов, два коммутатора, два дешифратора, сумматор, триггер, три элемента И и два элемента ИЛИ, первый информационный вход первого коммутатора соединен с внешней шиной разности адресов, вход сброса триггера в О, вход установки в 1 второго счетчика и первые входы элементов ИЛИ объединены и соединены с внешней шиной занесения разности адресов, первые ь.чоды элементов И и второй вход первого элемента ИЛИ соединены с внешней шиной убывания разности адресов, выход первого счетчика соединен с входом первого дешифра- .тора, первым информационным входом второго коммутатора и первым входом сумматора, второй вход которого соединен с щиной максимального адреса, а выход - с вторым информационным входом первого коммутатора, выход которого соединен с информационным
входом первого счетчика, выход второго счетчика соединен с входом второго дешифратора и вторым информационным входом второго коммутатора, выход которого соединен с информационным выходом блока, выход первого дешифратора соединен со счетным входом триггера, выход второго дешифратора - с вторым входом третьего элемента И, выход которого соединен с входом сложения второго счетчика, выход триггера соединен с управляющим входом первого коммутатора, вторыми входами первого и второго элементов И и входом третьего формирователя, выход которого соединен с вторым входом второго элемента ИЛИ, выходы первого и второго элементов И и выход второго элемента ИЛИ соединены соответственно с входами сложения, вычитания и занесения первого счетчика, выход первого элемента ИЛИ соединен с входом первого формирователя, выход которого соединен с первым управляющим входом второго коммутатора и входом второго формирователя, выход которо- го с()единен с вторым управляющим входом втсрог о коммутатора, выходы первого и второго формирователей соединены соответственно с первым и вторы управляющими выходами блока, в за- датчик скорости введены второй буферный регистр, элемент сравнения кодов, коммутатор, элемент задержки и сумматор, информационные входь буферных регистров соединены с выходом
5
0
5
0
5
постоянного запоминающего устройства, вход занесения первого регистра соединен с первым управляющим входом задатчика скорости, вход занесения второго регистра соединен с входом элемента задержки и с вторым управляющим входом задатчика скорости, выход элемента задержки соединен с входом занесения сумматора и с первым управляющим выходом задатчика скорости, выходы первого и второго регистров соединены с информационными входами коммутатора и элемента сравнения кодов, выход коммутатора соединен с входом сумматора, выход ко- торого соединен с информационным выходом задатчика скорости, управляющий вход коммутатора соединен с первым выходом элемента сравнения кодов, первый, второй и третий выходы которого соединены соответственно с вторым, третьим и четвертым управляющими выходами задатчика скорости, при , этом первый и второй управляющие входы задатчика скорости соединены соответственно с первым и вторым управляющими выходами блока счетчика разности, первый, второй, третий и четвертый входы блока коррекции управля- юи(его напряжения соединены соответственно с первым, вторым, третьим и чс твертым управляющими выходами эадат- чика скорости, выход - с первым входом аналогового сумматора, второй вход которого соединен с выходом циф- роаналогового преобразователя.
фиг. 2
ft7
32
(риг.
| Патент США № 3699555, кл | |||
| 34017416, опублик | |||
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| Устройство для регулирования скорости движения позиционирующего механизма | 1985 |
|
SU1278965A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
