ел
Јь 1C
СО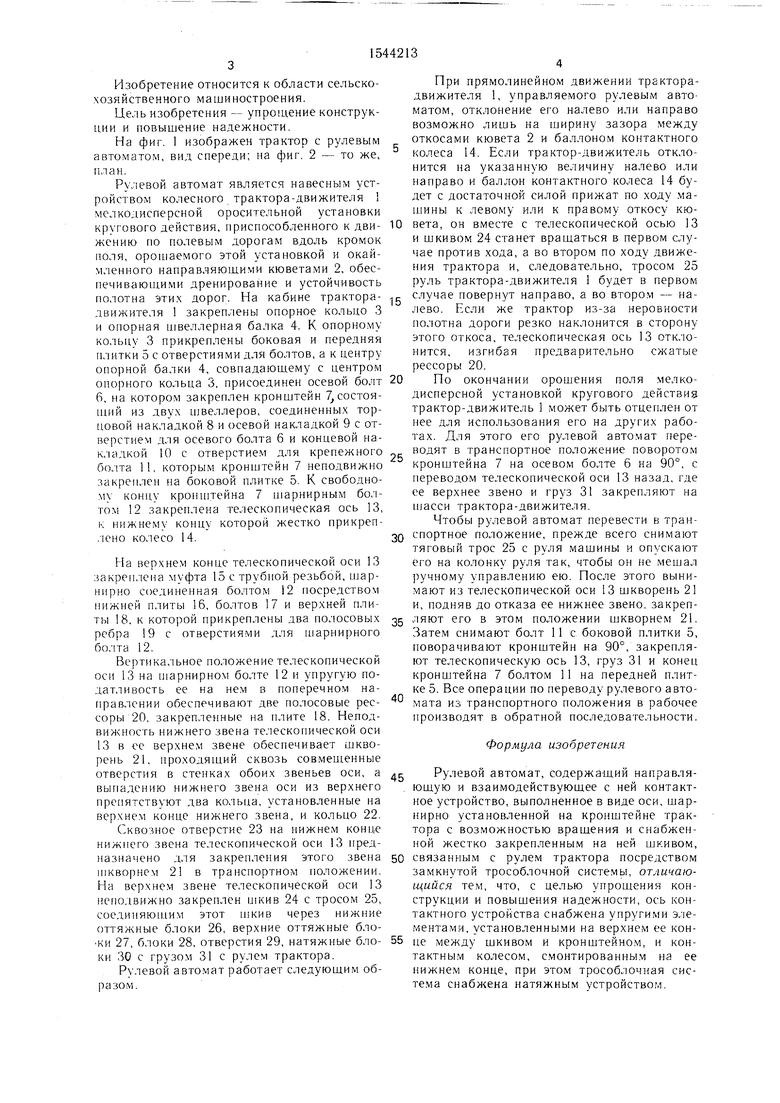
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевой автомат | 1990 |
|
SU1752214A2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОВОРОТОМ ЛЕСОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1994 |
|
RU2078708C1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
| РУЛЕВАЯ СИСТЕМА ПОВОРОТА БАЛКИ МОСТА И ПОЛУРАМ ТРАКТОРА | 2014 |
|
RU2555875C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2312784C9 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ (ВАРИАНТЫ) | 2009 |
|
RU2404078C1 |
| Многопланный самолет | 1928 |
|
SU12385A1 |
| УЗЕЛ ПОВОРОТА, ВЕЛОСИПЕД-ТРАНСФОРМЕР С ЭТИМ УЗЛОМ, РАМА ВЕЛОСИПЕДА (ВЕЛОСИПЕД КРАСНОВА) - ВАРИАНТЫ | 2014 |
|
RU2588291C2 |
Изобретение относится к сельскохозяйственному машиностроению. Цель изобретения - упрощение конструкции и повышение надежности. Рулевой автомат содержит трактор 1, контактное устройство, взаимодействующее с кюветом 3 и состоящее из колеса 14, телескопической оси 13 с имеющей трубную резьбу муфтой 15. Кронштейн 7 одним концом закреплен на тракторе, на другом его конце шарнирно с подпружиниванием закреплено контактное устройство. Шкив 24 жестко закреплен на оси 13 и связан тросом 25 с рулем трактора. При отклонении трактора от заданного курса контактное колесо взаимодействует со стенками кювета 2, проворачивается и через систему блоков поворачивает руль трактора. Отклонение от заданного курса компенсируется. 2 ил.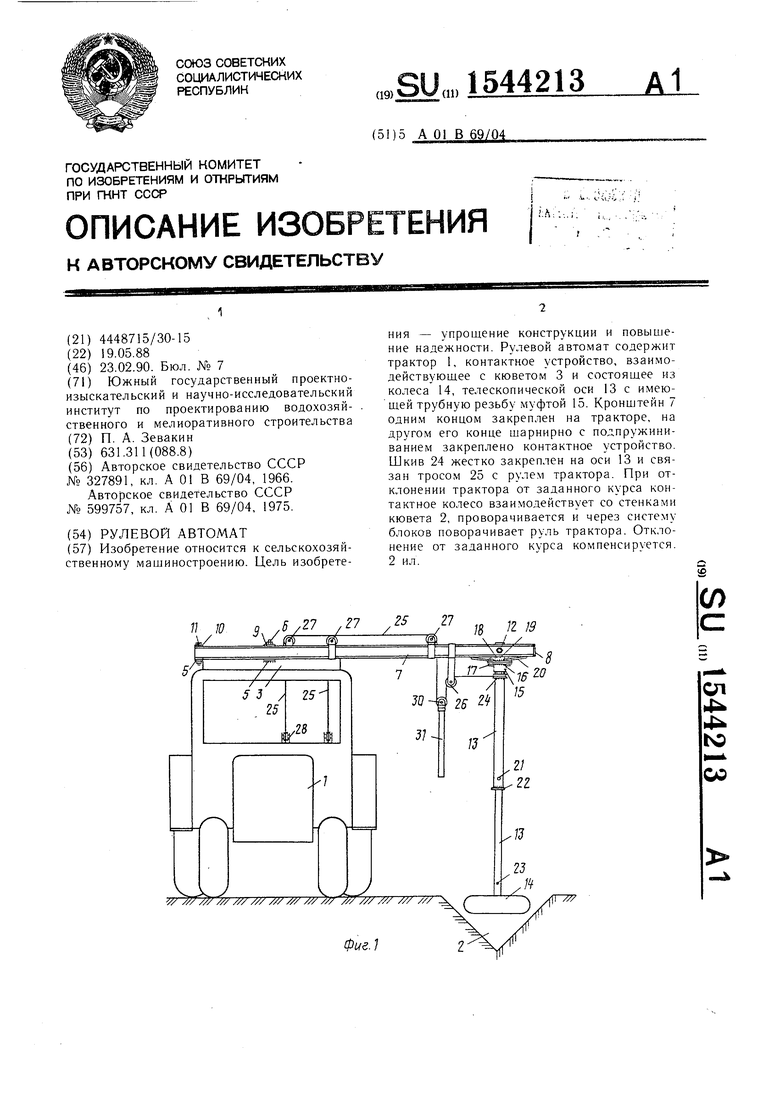
Лиг
Изобретение относится к области сельскохозяйственно о машиностроения
Цель и (обретения упрощение конструкции и повышение надежности
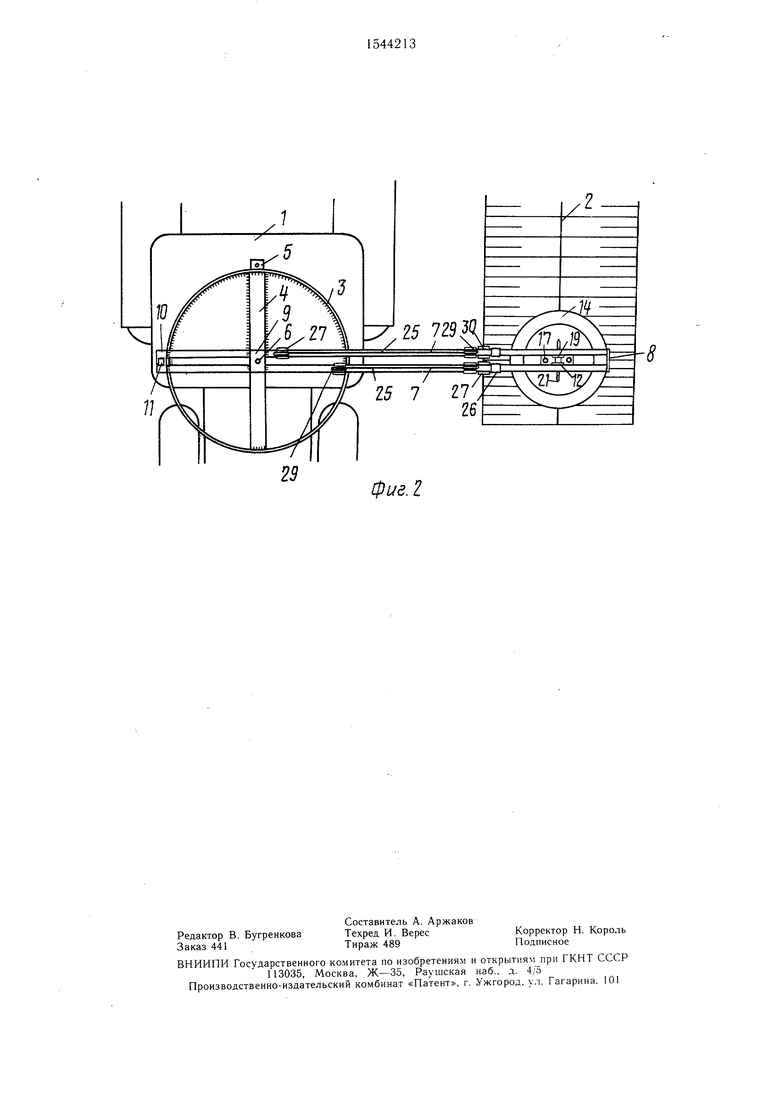
На фш 1 изображен трактор с рулевым авюмагом, ви i спереди, на фиг 2 то же,
II ДЬ
Ру нчзои двгома является навесным у ст- pomi вом колесною трактора-движителя 1 мелко шсперсной ороси елыюи установки круювою действия. приспособленного к дви жечнн) по полевым юрогам вдоль кромок по я, орошаемо о лой установкой и окай мк ннон) направляющими кюветами 2, обеспечивающими дренирование и устойчивости полотна лих На кабине трактора
твижите я 1 закреплены опорное кольцо 3 и опорная шве мерная балка 4 К оиорном ко1ьн 3 чрикреплены боковая и передняя п пики Г) с отверстиями для болтов, а к центру опорной балки 4, совпадаюшем с центром опорного кольца 3, присоединен осевой болi Ь, на котором закреплен кронштейн 7, состоя шин и тдзух шве т 1еров, соединенных торцовом накладкой М и осевой накладкой 1 с от- верс тием i т осевою болта 6 и концевой на- кла 1кои lit i отверстием для крепежною 11 которым кронштейн 7 неподвижно
закреплен на боковой плитке . К свободно УН конн кронпиейна 7 шарнирным бо 12 закрещена телескопическая ось 1,5, ь нижнем коннл коюрои жесмко прикреп
тено ко lee о 1 4
На верхнем копне телескопической оси 13 акреп ien муфта 1 г с резьбой, шар ннрчо ик1 пшенная болтом 12 посредством нижней 11ШТЫ 1Ь, болтов 17 п верхней щи т|)| &, к которой прикреплены 1ва полосовьи ребра 1() с отверстиями для шарнирною бо ч,. 12
Вертикальное по южение телескопическом our 1Л ча шарнирном болте 12 и у пру т у ю по гат низость ее на нем в поперечном направлении обеспечиваю две полосовые рессоры 2П лакреи тенные на п тиге 18 Heno i- вижно -1 ь нмжне о звена те тескопичес кой оси 1Л в ei верхнем звене обеспечивает шкво рень 21, проходящий сквозь совмещенные отверстия в стенках обоих звеньев оси, а вына им1ию нижнею звена оси из верхнего препятсч в ют два кольца, установленные на верхнем конце нижнею звена, и кольцо 22
Сквозное огверс ие 23 на нижнем конце нижнею звена те гескопической оси 13 пред назначено ыя закрепления этом) звена шкворнем 21 в транспортном положении На верхнем жене те тескопичес кои оси 14 непо изижно закреплен шкив 24 с тросом 25, toe шняюшим -лог шкив через нижшн омяжные блоки 26, верхние оттяжные бло ки 27 б юки 28, отверстия 29, натяжные бло- кп 30 с i ру зом 31 с рулем трактора
Р тевои автомат работает следующим об ра зом
5
0
5
0
0
5
0 5
0
5
При прямолинейном движении гракюра- движите.тя 1, управляемою р левым авто матом, отклонение его налево или направо возможно лишь на ширин за зора межд откосами кювета 2 и бал юном контактного колеса 14 Если трактор движитель откло нится на казанн ю величину налево или направо и баллон контактною колеса 14 б дет с юстаточной силой прижат по ход машины к тевом i: ш к правомч откос кювета, он вместе с телескопической осью 13 и шкивом 24 станет вращаться в первом t чае против хота, а но тором по ход 1виже- ния трактора и, следовательно, трепом 25 трактора гвижителя 1 бчдет в первом поверн i направо, а во втором налево ели же трактор и-,-за нероьжн ги полотна topoi и резко пак тоники в сторомх jioit oiKrica те тескопическая ось 13 огк то нится, изгибая предварительно жа1ые рессоры 20
По окончании орошения поля мелко дисперсной установкой иди гниу трактор-движитель 1 может быть отцеплен от нее для использования ею на работах Для dioio ет о р левои автомат переводят в транспортное положение иоворотм кронштейна 7 на осевом болте п на 9() i переводом телескопической оси 13 паза i, i де ее верхнее звено и 31 закрепляю на шасчи трактора-дви жителя
Чтобы рчлевои автомат перевести в трап спортное положение, прежде всего снимакп тяговый трос 2Г с машины и опчскаюг ею на колонкч так, чтобы еж не меша i правлению ею После гого выпи мают из телескопической оси 13 шквгрень21 и, подняв до отказа ее нижнее звено закреп- гяют его в этом положении шкворнем 21 Затем снимают болт 11 с боковой плитки 5, поворачивают кронштейн на 90°. закрепляют телескопическую ось 13. гр з 31 и конец кронштейна 7 болтом 11 на передней плит ке 5 Все операции по перевод}, рулевого автомата из транспортною положения в рабочее производят в обратной послеювагельности
Формула и ionpei ени.ч
Р левой автомат, содержащий направляющую и взаимодействующее с ней контактное устройство, выполненное в виде оси, шар- нирно установленной на кронштейне трак- гора с возможностью вращения и снабжен ной жестко закрепленным на ней .пьивом, связанным с рулем трактора посредством замкнутой трособлочной системы, от шчаю- щи{ц.ч тем, что, с целью упрощения кон струкции и повышения надежности, ось контактною УС тройства снабжена у пру г ими ле ментами, усгановченными на верхнем ее кон це между шкивом и кронштейном, и контакт и ым колесом, смонтированныу на ее нижнем конце, при этом грособлоч ыя ик тема снабжена натяжным устройством
/
ИЕ
я
10 До Т
фиг. 2
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ДОЖДЕВАЛЬНЫХ И ПОЛИВНЫХ АГРЕГАТОВвсЕСсюгнАя ПДТЕЙТ110-ТЕУ1Ш'{101?^ | 0 |
|
SU327891A1 |
| Двухтактный двигатель внутреннего горения | 1924 |
|
SU1966A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
