Изобретение относится к области сельского хозяйства, а именно к области механизации и автоматизации оросительных систем, и может быть использовано на существующих дождевальных мобильных агрегатах, иапример, типа ДДА-ЮОМ для их автоматического вождения вдоль оросительного канала.
Известиы устройства для автоматического вождения тракториых агрегатов вдоль опорной траектории, например, специально нарезаемой борозды, в которых в качестве датчиков траектории применяются мехаиическпе щупы с колесами или полозками.
Особениостью работы дождевальных агрегатов типа ДДА-ШОМ является их ирямолинейное возвратно-ностунательное движение вдоль оросительного канала с небольшой скоростью и одновременное осуществление искусственного дождевания.
Прямолинейный оросительный канал можно использовать для опорной траектории движения, что позволяет не нарезать специальную опорную борозду.
Однако известные устройства в этих условиях неприменимы, так как колеса или полозки застревают в стенках и дне каналов, нарезаемых Б грунте, что приводит к их поломке и не обеспечивает надежности автоматического вождения.
Цель изобретения - увеличение точности и надежности вождения агрегата вдоль кромки оросительного канала с использованием ее в качестве направляющей вождення.
Это достигается тем, что следящие элементы выполиены в виде сферических полых по-, плавков, постоянно поджатых 1пружинами к боковой стеике оросителя, имеющих вертикальную ось вращения и кинематически связанных посредством двуплечих рычагов, шарнирно закрепленных на .кронштейнах рамы трактора с соединительной планкой, установленной на переключателе хода штока золотника гидрорасиределителя и связанной шарнирио со штоком, конец которого входит в корпус переключателя и имеет бурт, иодпружипенный с обеих сторон между торцами корпуса.
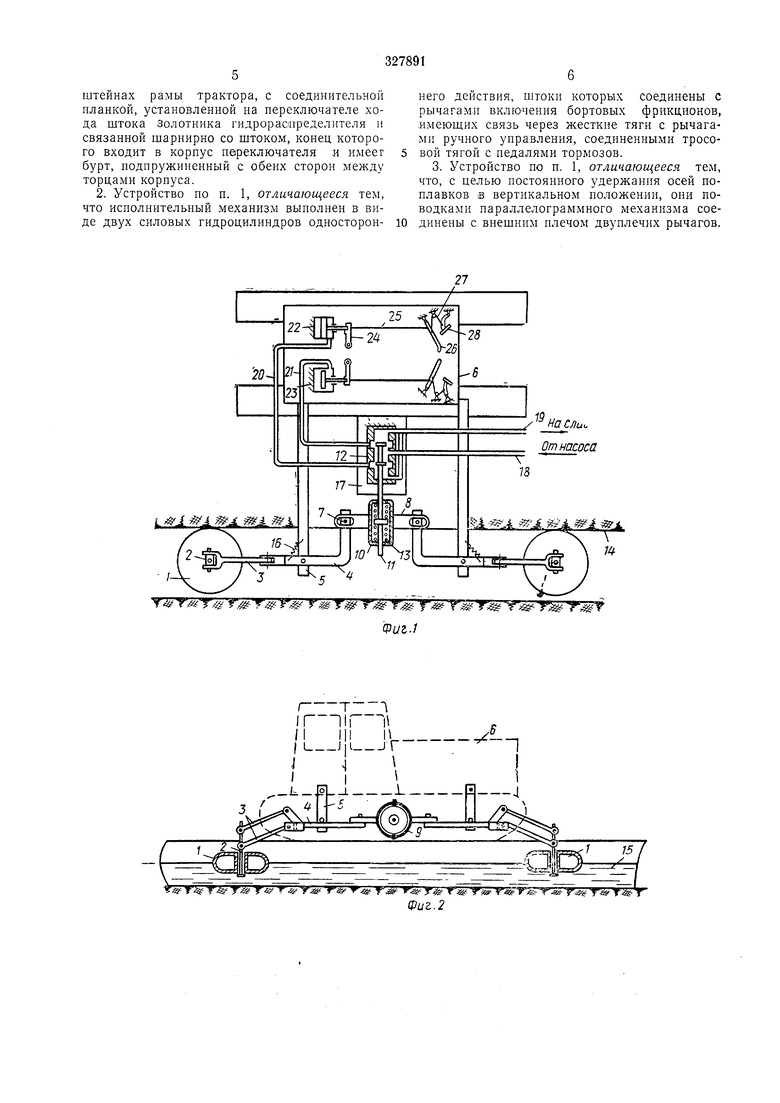
Па фиг. 1 схематически изображеио устройство для автоматического вождения дождевальных агрегатов вдоль оросителя, вид сверху; на фиг. 2 - то же, вид сбоку.
Устройство включает два следящих иоплавковых элемента 1 с осью вращения 2 в вертикальной плоскости. Осп датчиков поводками 3 параллельного механизма соединены с внешним плечом двуплечих рычагов 4, шарнирно установленных па кронштейнах 5 рамы 6 трактора дождевального агрегата. Внутрензы соединительной планки 8, которая посередине шарнира 9 соединена с переключателем 10 золотника 11.
Выступающий конец штока золотника 11 гидрораспределителя 12, выполненный в виде усилителя с отрицательным 1перекрытием выходных отверстий, имеет бурт, который с обеих сторон поджат пружинами 13, установленными в корпусе переключателя 10. Поплавковые датчики постоянно к борту 14 оросителя 15 пружинами 16, соединенными с кронштейнами 5 н внешними нлечами рычагов 4.
Золотниковый распределитель установлен па кронштейне 17 рамы трактора агрегата и соединен трубопроводами 18 и 19 соответственно с напорной и сливной магистралями гидросистемы трактора и трубонроводами 20 и 21 с исполяительными силовыми цилиндрами 22 и 23 одностороннего действия управлеппя бортовыми фрикционами трактора.
Штоки гидроцилипдров 22 и 23 соедипепы с рычагом 24 включения бортовых фрикционов, которые при номощн тяг 25 соединены с рычагами 26 ручного управления бортовыми фрикционами. Рычаги 26 посредством тросовой тяги 27 соединены с педалями 28 тормозов трактора.
При движеппи агрегата строго вдоль стенки оросителя па заданном расстоянии от пего устройство находится в равновесии и пе воздействует на механизм управления поворотом трактора дождевального агрегата. При отклонении трактора от стенки оросителя изменяется угол между продольной осью трактора и линией, соединяющей оси вращения ноплавко,в 1. Это угловое отклопение пронорциопальпо 1преобразуется В линейное перемещение золотннка 11, связанного с внутренними плечами рычагов 4 посредством соединительной нланки 8 и переключателя 10. Золотппк, перемещаясь, открывает доступ маслу из нагнетательного трубопровода 18 и трубопровода 20 или 21 в силовой цилипдр 22 или 23, шток которого воздействует на соответствующий рычаг 24 включения бортовых фрикциокоБ. Перемещение рычага 24 передается через тягу 25 на рычаг 26 ручного управления и через него и тросовую тягу 27 - на педаль тормоза 28. В результате трактор поворачивается к заданной траектории движения трактора и осью оросителя исчезает, т. е. золотник 11 перемещается в нейтральное положение, соединяя трубопровод 20 или 21 силового цилиндра со сливным трубонроводом 19. Под действием пружин бортовых фрикционов рычаг 24 возвращает поршни цилиндра 22 или 23 в исходное положение, выдавливая масло по трубопроводу 20 или 21 в сливной трубопровод 19. Рычаг 26 и педаль 28 тормоза при этом также возвращаются в исходное положение.
тормоза производилось бы при достаточном перемещении рычага 26, соответствующем, примерно, лолному выключению бортовых фрикционов.
Устройство сохраняет дублирование ручного, п автоматического управления поворотом. Ручное управление новорото.м необходимо нри выезде агрегата с оросителя. Управление агрегатом при этом обычное.
Установка пружин 13 в переключателе 10 необходима для предотвращения ноломок в кинематической цепи поплавок /--золотниковый распределитель 12, которые могут произойти при повышенном отклонении траектории движения агрегата от оси оросителя, что может быть вызвано недостаточной скоростью поворота агрегата после получения сигнала от ооплавков /, например, вследствие износа фрикционных накладок тормозной ленты
и дисков фрикционов или недостаточного сцепления агрегата с почвой.
Устройство реагирует на знак и величину отклонения агрегата от заданной траектории, плавно передает сигнал рассогласования на
золотник, имеет высокую скорость срабатывания, работает одинаково при движении агрегата в прямом и обратном направлении вдоль оросителя. Изменение уровня воды в оросителе не влияет на работу устройства, так как
поплавок 1 может перемещаться по высоте без кинематического воздействия на золотник 11 раснределителя 12.
Уст ройство предназначено для вождения агрегата по прямолинейной траектории, но
может работать и при вождении агрегата вдоль криволинейной траектории, для чего радпус кривизны траектории движения должен превышать расстояние хмежду осями поплавковых элементов.
Устройство допускает первоначальную наст;ройку системы автоматического вождения агрегата. В зависимости от требуемого расстояния между трассой движения агрегата и стенкой оросителя место установки шарнира двунлечих рычагов 4 с кронштейнами 5 может быть перенесено вдоль кронштейнов.
Предмет изобретения
1. Устройство для автоматического вождения дождевальных и поливных агрегатов, содержащее следящие элементы копирующего типа, золотниковый гидрораспределитель с переключателем хода штока и гидравлический
силовой исполнительный механизм, отличающееся тем, что, с целью увеличения точности и надежности вождения агрегата вдоль кромки оросительного канала с использованием ее в качестве направляющей вождения, следящие элементы выполпены в виде сферических полых поплавков, постоянно поджатых при помощи пружин к боковой стенке оросителя, имеющих вертикальную ось вращения и кине.матпчески связанных посредством двуплечих
штейнах рамы трактора, с соединительной планкой, установленной на переключателе хода штока Золотника гидрораопределителя и связанной шарнирно со штоком, конец которого входит в корпус переключателя .и имеет бурт, подпружиненный с обеих сторон между торцами корпуса.
2. Устройство по п. 1, отличающееся тем, что исполнительный механизм выполнен в виде двух силовых гидроцилиндров одностороннего действия, штоки которых соединены с рычагами включения бортовых фрикционов, .имеющих связь через жесткие тяги с рычагами ручного управления, соединенными тросовой тягой с педалями тормозов.
3. Устройство по п. 1, отличающееся тем, что, с целью постоянного удержания осей поплавков в вертикальном положении, они поводками параллелограммного механизма соединены с внешним нлечом двуплечих рычагов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКОНСОЛЬНЫЙ ДОЖДЕВАЛЬНЫЙ АГРЕГАТ | 2002 |
|
RU2222184C2 |
| Автомат управления трактором С-80 | 1956 |
|
SU120132A1 |
| АВТОМАТ ДЛЯ ВОЖДЕНИЯ ТРАКТОРНЫХ ДОЖДЕВАЛЬНЫХАГРЕГАТОВ | 1966 |
|
SU184029A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ПРОСТРАНСТВЕННЫХ ФЕРМ ДВУХКОНСОЛЬНЫХ ДОЖДЕВАЛЬНЫХ АГРЕГАТОВ | 1999 |
|
RU2156058C1 |
| Автоматизированный дождевальный агрегат | 1989 |
|
SU1761051A1 |
| ДОЖДЕВАЛЬНЫЙ АГРЕГАТ | 1998 |
|
RU2152711C1 |
| Устройство для автоматического направления движения самоходной сельскохозяйственной машины | 1980 |
|
SU948308A1 |
| Дождевальный агрегат | 1988 |
|
SU1576059A1 |
| ДВУХКОНСОЛЬНЫЙ ДОЖДЕВАЛЬНЫЙ АГРЕГАТ | 1998 |
|
RU2130251C1 |
| Механизм управления поворотом гусеничного трактора | 1985 |
|
SU1311988A1 |
т-а Т Т Т Y Т Y Т
(Pi/a./
