| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости рельсового транспортного средства | 1989 |
|
SU1705149A1 |
| Устройство для регулирования скорости транспортного средства | 1986 |
|
SU1428618A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2187437C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ, ХАРАКТЕРИЗУЮЩИХ СОСТОЯНИЕ СИСТЕМЫ КОЛЕСО - РЕЛЬС, ПРИ ДВИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА ПО КРИВОЛИНЕЙНОМУ УЧАСТКУ ПУТИ | 1991 |
|
RU2061611C1 |
| Устройство для защиты от боксования рельсового экипажа | 1974 |
|
SU552016A3 |
| СПОСОБ НЕПРЕРЫВНОЙ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2480552C1 |
| РЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО С ОДНООСНОЙ ТЕЛЕЖКОЙ | 1997 |
|
RU2143356C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ МНОГОКОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2483950C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА, ИМЕЮЩАЯ СВЕРХПОЛУСФЕРИЧЕСКИЙ ОБЗОР | 2011 |
|
RU2574324C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УКЛОНОВ ПРОФИЛЯ ПОВЕРХНОСТИ АЭРОДРОМНЫХ ПОКРЫТИЙ | 2015 |
|
RU2592930C1 |
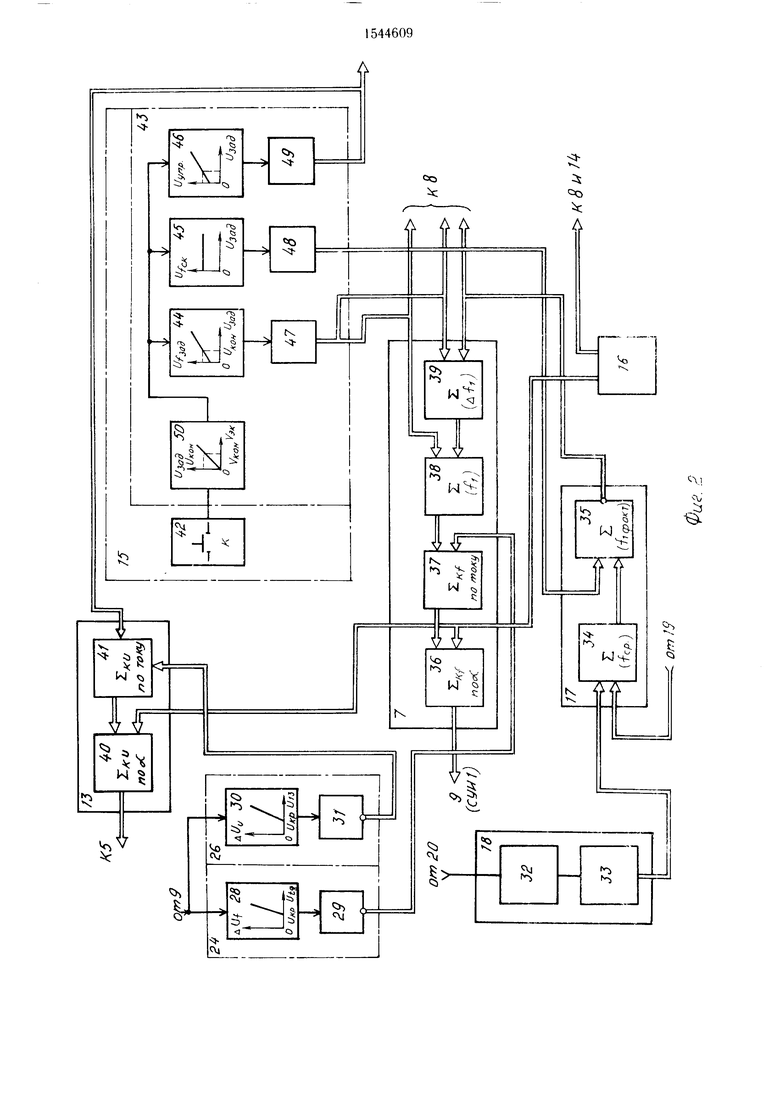
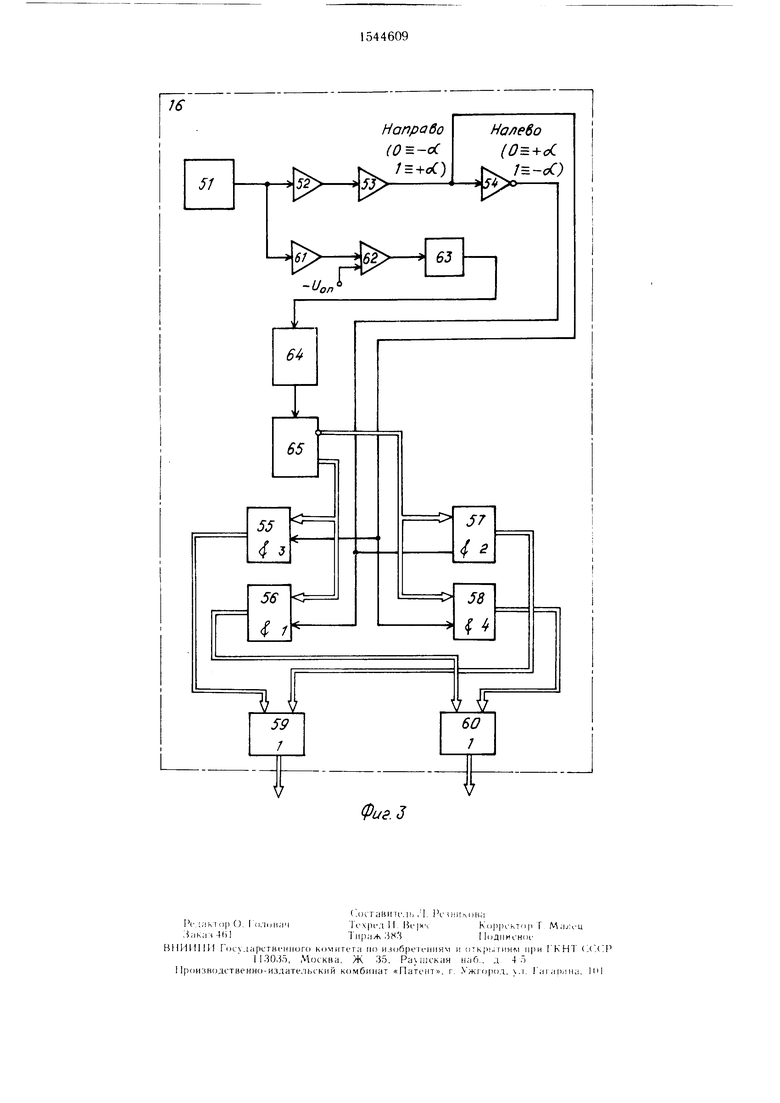
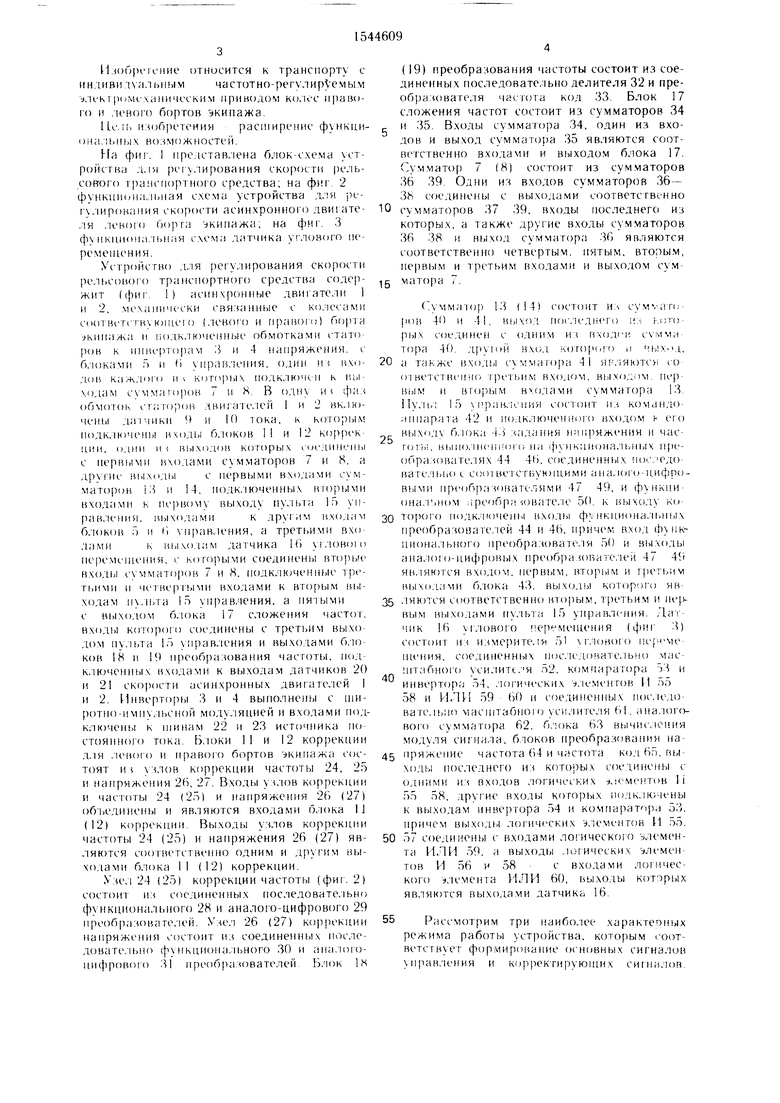
Изобретение относится к транспорту с индивидуальным частотно-регулируемым электромеханическим приводом колес правого и левого бортов экипажа. Цель изобретения - расширение функциональных возможностей. Устройство содержит один на оба борта тележки датчик 16 углового перемещения тележки относительно ее продольной оси, блоки 11 и 12 коррекции /частоты и напряжения/ и датчики 20 и 21 скорости асинхронных двигателей 1 и 2, блок 17 сложения частот. Кроме того, для каждого борта тележки предусмотрены сумматоры 7/8/ и 13/14/. Устройство позволяет корректировать управление по частоте и напряжению в зависимости от тока нагрузки двигателей 1 и 2 при прямолинейном движении экипажа или при вписывании его в кривые большого радиуса /более 50м/, причем коррекция составляет незначительную долю от величины основных сигналов, а также формировать дополнительно управляющие сигналы по возмущению при движении экипажа в кривых малого радиуса кривизны /менее 50 м/, причем величина этих дополнительных сигналов управления соизмерима с величиной основных сигналов управления. Таким образом, экипаж может двигаться по любому рельефу местности. 3 ил. 2 з.п. ф-лы.