Изобретение относится к области строительства и эксплуатации аэродромов и касается определения геометрических параметров профиля поверхности аэродромных покрытий, в частности их уклонов.
Существуют различные устройства для измерения геометрических параметров профиля поверхности аэродромных покрытий, в частности их уклонов. Эти параметры оцениваются с помощью специально оборудованных передвижных лабораторий, перемещающихся по поверхности с помощью автомобиля, который может использоваться и непосредственно как носитель измерительной аппаратуры.
Известно устройство (патент №RU 2201577) для измерения геометрических параметров профиля дороги, содержащее установленные в ряд на поперечной балке переднего бампера автомобиля излучатели с оптическими системами, выполненными в виде преобразователей пучков лазерного света в линию с образованием непрерывной линии по ширине дорожного покрытия, оптические приемники отраженных излучений, выполненные в виде камер, преобразователи отраженных сигналов, процессорный блок, датчики корректировки колебаний кузова автомобиля (акселерометры), датчики времени и пройденного пути. Недостатком известного устройства является то, что оно не позволяет в полной мере исключить влияние колебаний кузова автомобиля на выходную информацию, в частности, вследствие воздействия на чувствительные массы акселерометров сил инерции, порождаемых вибрациями, ускоренными поступательными и вращательными движениями автомобиля. Это предопределяет существенные погрешности измерений геометрических параметров профиля поверхности дорожного покрытия.
Известно устройство (патент №RU 2114392) для определения, в частности, уклонов профиля поверхности дорожного покрытия, содержащее измерительно-вычислительный комплекс, включающий датчики линейной скорости движения автомобиля, пройденного пути, времени движения, угловой скорости поворота или курса, два акселерометра для определения уклонов дорожного покрытия и линейных ускорений автомобиля. В устройстве осуществляется компенсация в выходных сигналах акселерометров компонент, порождаемых силами инерции, возникающими при ускоренных движениях автомобиля. Эта компенсация осуществляется на основе сигналов, поступающих от датчиков линейной скорости движения автомобиля и угловой скорости поворота или курса. Недостатками известного устройства являются влияние вибраций автомобиля на точность измерения уклонов вследствие особенностей динамики акселерометров. Это влияние не исключается, в полной мере, установкой фильтров нижних частот в каналах распространения информационного сигнала. Кроме того, определение продольных уклонов с помощью акселерометра, установленного на автомобиле, осуществляется на длинной опорной базе, равной расстоянию между осями передних и задних колес. Это обстоятельство не позволяет осуществлять детализацию уклонов, которая может быть осуществлена только на короткой опорной базе
Наиболее близким по технической сущности является устройство (патент №2114242) для определения технико-эксплуатационных показателей дорожных одежд, в частности уклонов профиля поверхности дорожных покрытий, содержащее базовый автомобиль, виброизолированную тележку, выполненную в виде рамы, соединенной с одной стороны с помощью двух шарниров с подкладками заднего моста базового автомобиля, а с другой стороны опирающейся на два колеса, с возможностью поворота в горизонтальной плоскости, снабженную блоком измерительных гироскопических датчиков геометрических характеристик дорожных одежд, установленных на раме виброизолированной тележки по линии ее продольной оси. Недостатки известного устройства заключаются в следующем. Установка измерительных гироскопических датчиков на виброизолированную одноосную колесную тележку, шарнирно связанную с подкладками заднего моста базового автомобиля и опирающуюся на два соосных колеса с вертолетными шинами, хотя и обеспечивает частичную изоляцию гироскопических датчиков от вибраций автомобиля, но фактически предопределяет осуществление измерений продольных уклонов как углов наклона плоскости рамы тележки относительно моделируемой с помощью гироскопических датчиков плоскости горизонта. При этом наклон плоскости рамы тележки определяется углом наклона плоскости, включающей оси колес автомобиля, и дополнительным углом поворота плоскости рамы тележки относительно плоскости осей колес автомобиля. В итоге, результирующий угол поворота плоскости рамы тележки относительно плоскости горизонта отличается от продольного уклона профиля поверхности покрытия, что порождает существенные погрешности в измерении продольного уклона. Кроме того, к числу недостатков известного устройства относится возмущаемость гироскопического датчика - гироскопической вертикали силами инерции, воздействующими на ее корректирующие датчики горизонта при ускоренных поступательных и вращательных движениях автомобиля с тележкой. В итоге, моделируемая на тележке с помощью гироскопических датчиков плоскость горизонта реально отклонена от истинной плоскости горизонта в положение кажущейся плоскости горизонта, что порождает дополнительные погрешности в измерении продольного, а также поперечного уклонов.
Недостатком, которым обладают также все известные устройства, является использование в них базового автомобиля для перемещения измерителей геометрических параметров профиля поверхности покрытий, в частности продольного уклона профиля. Это предопределяет существенные материальные затраты и высокую трудоемкость измерительных работ.
Таким образом, можно сделать вывод, что все известные устройства для измерения геометрических параметров профиля поверхности покрытий не обеспечивают высокий уровень точности измерений, а их эксплуатация связана с существенными материальными затратами и высокой трудоемкостью измерительных работ.
Решение указанной технической задачи достигается тем, что в известном устройстве, содержащем транспортный колесный модуль с платформой, гироскопический измеритель углов поворота платформы относительно плоскости горизонта с продольным и поперечным датчиками углов, продольным и поперечным датчиками горизонта, продольным и поперечным датчиками моментов, многоканальный вычислительно-управляющий блок, включающий каналы продольной, поперечной коррекции гироскопического измерителя и канал формирования выходной информации, при этом вход канала продольной коррекции соединен с выходом продольного датчика горизонта, а выход канала продольной коррекции - со входом продольного датчика момента, вход канала поперечной коррекции соединен с выходом поперечного датчика горизонта, а выход канала поперечной коррекции - со входом поперечного датчика момента, входы канала формирования выходной информации соединены с выходами продольного и поперечного датчиков углов гироскопического измерителя, согласно изобретению транспортный колесный модуль с платформой выполнен в виде автономного одноосного колесного модуля, опирающегося на два соосных колеса, управляемых установленными на платформе приводными двигателями, устройство снабжено датчиками угловых скоростей вращения колес, датчиками угловых ускорений вращения колес, измерителями высоты двух крайних точек продольной оси кронштейна платформы над профилем поверхности, каналом управления приводными двигателями в вычислительно-управляющем блоке, при этом выходы датчиков угловых ускорений вращения колес соединены с дополнительными входами канала продольной коррекции, выходы датчиков угловых скоростей вращения колес соединены с дополнительными входами канала поперечной коррекции, а выходы измерителей высоты - с дополнительными входами канала формирования выходной информации, выход поперечного датчика угла гироскопического измерителя дополнительно соединен со входом канала управления приводными двигателями, а выходы канала управления приводными двигателями - с управляющими обмотками этих двигателей.
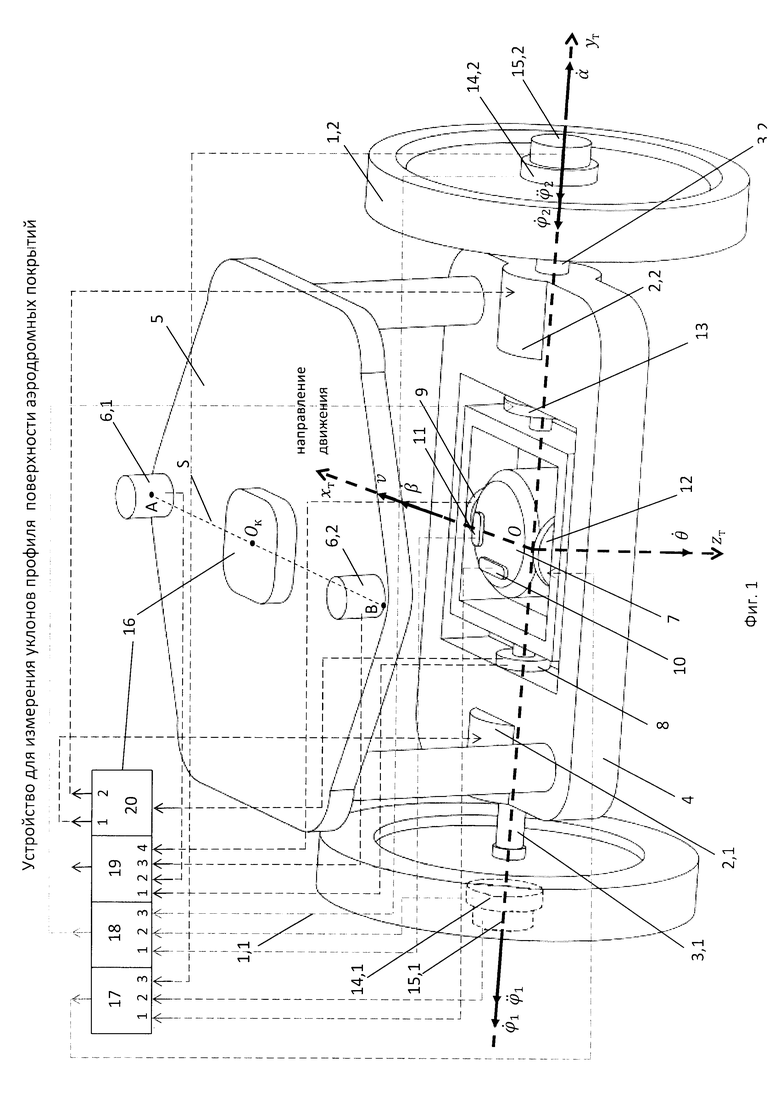
На фигуре 1 представлено схематическое изображение устройства для измерения уклонов профиля поверхности аэродромных покрытий. Устройство содержит одноосный колесный модуль (ОКМ), включающий колесную пару 1 (1.1, 1.2), установленную с возможностью вращения колес посредством приводных двигателей 2 (2.1, 2.2) на двух соосных полуосях 3 (3.1, 3.2), и платформу 4. Далее по тексту совмещенные полуоси 3 вращения колес 1 колесной пары рассматриваются как ось вращения колес ОКМ. Полуоси 3 размещены на платформе 4, на которой установлен кронштейн 5 с измерителями высоты (например, лазерными дальномерами) 6 (6.1, 6.2), расположенными в крайних точках А и В продольной оси кронштейна 5 (АВ=2s, точка Ок - середина отрезка АВ) и измеряющими высоту этих точек над профилем поверхности аэродромного покрытия. На платформе 4 размещен гироскопический измеритель 7 углов поворота платформы относительно плоскости горизонта вокруг ее поперечной оси (оси вращения колес ут) с помощью поперечного датчика угла 8 и вокруг ее продольной оси с помощью продольного датчика угла 9. Гироскопический измеритель снабжен системами продольной и поперечной коррекции, включающими продольный 10 и поперечный 11 датчики горизонта, а также продольный 12 и поперечный 13 датчики моментов. Устройство снабжено также датчиками угловой скорости 14 (14.1, 14.2) и датчиками угловых ускорений 15 (15.1, 15.2) вращения колес. На кронштейне 5 установлен многоканальный вычислительно-управляющий блок 16, который включает каналы продольной коррекции 17 и поперечной коррекции 18, канал формирования выходной информации 19 и канал управления двигателями колес 20, при этом 1-й вход канала 17 соединен с выходом продольного датчика горизонта 10, а 2-й и 3-й входы канала 17 соединены соответственно с выходами датчиков угловых ускорений вращения колес 15.1 и 15.2, при этом выход канала 17 соединен со входом продольного датчика момента 12, 1-й вход канала 18 соединен с выходом поперечного датчика горизонта 11, а 2-й и 3-й входы соединены соответственно с выходами датчиков угловых скоростей вращения колес 14.1. и 14.2., а выход канала 18 соединен со входом поперечного датчика момента 13, 1-й вход канала 19 соединен с первым выходом поперечного датчика угла 8, 2-й и 3-й входы канала 19 соединены соответственно с выходами измерителей высоты (лазерных дальномеров) 6.1 и 6.2, а 4-й вход канала 19 соединен с выходом продольного датчика угла 9, вход канала 20 соединен со 2-м выходом поперечного датчика угла 8 гироскопического измерителя, а 1-й и 2-й выходы канала 20 соединены с управляющими обмотками приводных двигателей 2.1 и 2.2 соответственно.
Устройство для измерения уклонов профиля поверхности аэродромного покрытия работает следующим образом. ОКМ автономно с помощью приводных двигателей колес перемещается по заданной программе но поверхности аэродромного покрытия; платформа 4 ОКМ (фиг. 1) горизонтируется вокруг оси 3 вращения колес по сигналам, поступающим от поперечного датчика угла 8 трехстепенного гироскопического измерителя 7, ось собственного вращения которого с помощью систем продольной и поперечной коррекции удерживается в направлении вертикали траекторной системы координат Охтутzт (фиг. 1, 2). Измерения продольных уклонов профиля поверхности осуществляются на основе информации, поступающей в канал выходной информации 19 вычислительно-управляющего блока от измерителей высоты (лазерных дальномеров) 6.1 и 6.2, установленных в крайних точках А и В продольной оси кронштейна 5, а также от поперечного датчика угла 8. Измерения поперечных уклонов профиля поверхности осуществляются на основе информации, поступающей в канал выходной информации 19 от продольного датчика угла 9 гироскопического измерителя 7 (фиг. 1).
Управление скоростью и направлением движения ОКМ осуществляется путем подачи напряжений на приводные двигатели 2.1 и 2.2 колесной пары 1. При этом повороты ОКМ выполняются за счет формирования разностей угловых скоростей вращения колес 1.1, 1.2, расположенных соосно. При отсутствии проскальзывания колес скорость V ОКМ определяется соотношением:

где
 - угловые скорости колес 1.1 и 1.2 соответственно; r - радиус колеса.
- угловые скорости колес 1.1 и 1.2 соответственно; r - радиус колеса.
Угловая скорость  разворота ОКМ в азимуте такова:
разворота ОКМ в азимуте такова:

где 2b - длина оси вращения колес (фиг. 2).
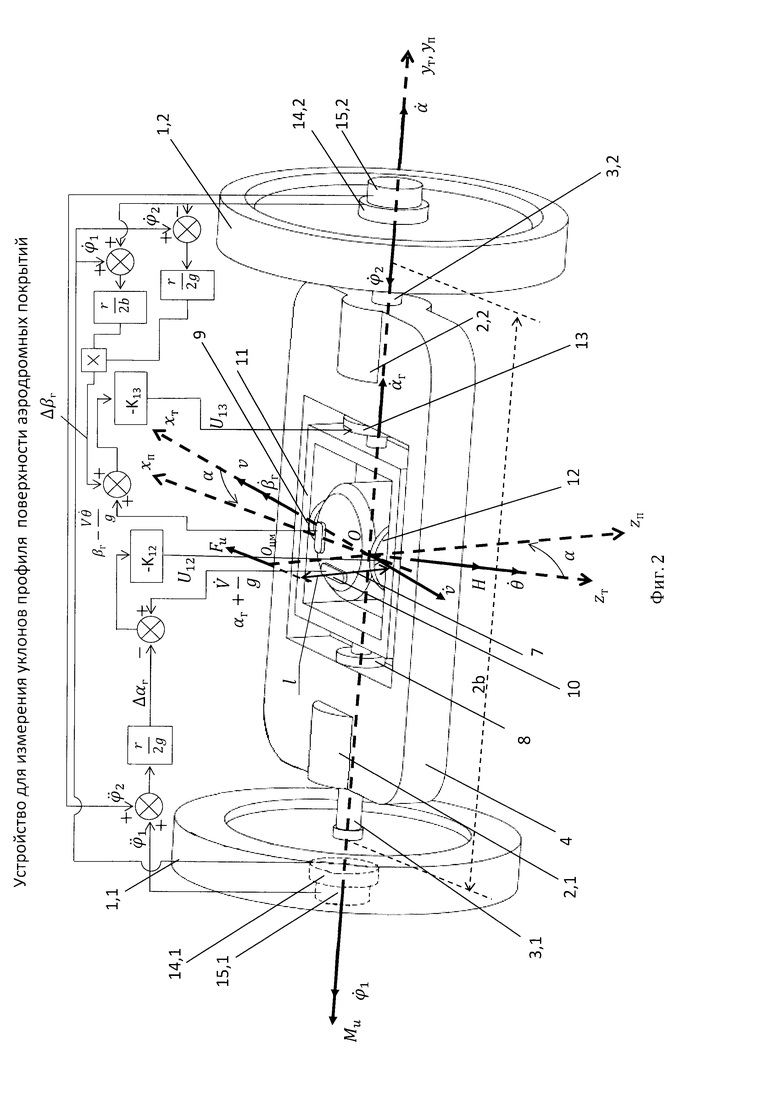
Платформа 4 удерживается в плоскости горизонта путем использования принципа инерционной стабилизации следующим образом. При отклонении платформы вокруг оси вращения колес ут относительно плоскости горизонта на угол α от поперечного датчика угла 8 гироскопического измерителя 7 в канал управления двигателями колес 20 поступает управляющий сигнал, пропорциональный углу α (фиг. 1). На основе этого сигнала в канале 20 формируются напряжения, поступающие на управляющие обмотки двигателей 2.1, 2.2, что приводит к ускоренному вращению колес 1.1, 1.2 и к появлению линейного ускорения  ОКМ:
ОКМ:

где  ,
,  - угловые ускорения колес 1.1 и 1.2 соответственно.
- угловые ускорения колес 1.1 и 1.2 соответственно.
Ускорение V порождает силу инерции  (m - совокупная масса платформы) и приложенный к платформе 4 вокруг оси ут соответствующий момент сил инерции Ми (фиг. 2):
(m - совокупная масса платформы) и приложенный к платформе 4 вокруг оси ут соответствующий момент сил инерции Ми (фиг. 2):

где l - смещение центра масс Оцм платформы над осью вращения колес 3 относительно ее центра О вдоль нормали к плоскости платформы 4 (l=ОцмО).
Под действием момента Ми платформа 4 возвращается в горизонтальное положение (α=0).
Удержание оси Н собственного вращения ротора гироскопа в направлении вертикали zт (фиг. 2) осуществляется под воздействием момента сил коррекции, развиваемого поперечным датчиком момента 13 вокруг оси наружной рамы гироскопа, и момента сил коррекции, развиваемого продольным датчиком момента 12 вокруг оси внутренней рамы гироскопа. При этом управляющие сигналы u12, u13, поступающие на датчики моментов 12, 13 соответственно, определяются соотношениями:


где k12, k13 - масштабные коэффициенты в соответствующих каналах коррекции; αг, βг - углы отклонения оси собственного вращения Н гироскопа от вертикали места соответственно вокруг осей наружной и внутренней рам гироскопа;  и
и  - величины уклонений кажущейся вертикали относительно истинной вертикали, порождаемые воздействием сил инерции, возникающих соответственно при наличии линейного ускорения
- величины уклонений кажущейся вертикали относительно истинной вертикали, порождаемые воздействием сил инерции, возникающих соответственно при наличии линейного ускорения  (сила инерции воздействует на продольный датчик горизонта 10) и при наличии угловой скорости
(сила инерции воздействует на продольный датчик горизонта 10) и при наличии угловой скорости  (центробежная сила инерции воздействует на поперечный датчик горизонта 11); Δαг; Δβг - сигналы, компенсирующие уклонения кажущейся вертикали соответственно вокруг осей наружной и внутренней рам гироскопа в каналах его коррекции; g - ускорение силы тяжести. В соответствии с (1)-(3) имеем:
(центробежная сила инерции воздействует на поперечный датчик горизонта 11); Δαг; Δβг - сигналы, компенсирующие уклонения кажущейся вертикали соответственно вокруг осей наружной и внутренней рам гироскопа в каналах его коррекции; g - ускорение силы тяжести. В соответствии с (1)-(3) имеем:


Использование в управляющих сигналах u12, u13 величин Δαг, Δβг позволяет исключить баллистические погрешности гироскопического измерителя 7 и тем самым существенно повысить точность измерения уклонов. Собственно формирование величин Δαг, Δβг осуществляется соответственно в каналах 17 и 18 блока 16 в соответствии со схемой на фиг. 2 на основе информации, поступающей от датчиков угловых ускорений 15.1 и 15.2 вращения колес и датчиков угловых скоростей 14.1 и 14.2 вращения колес.
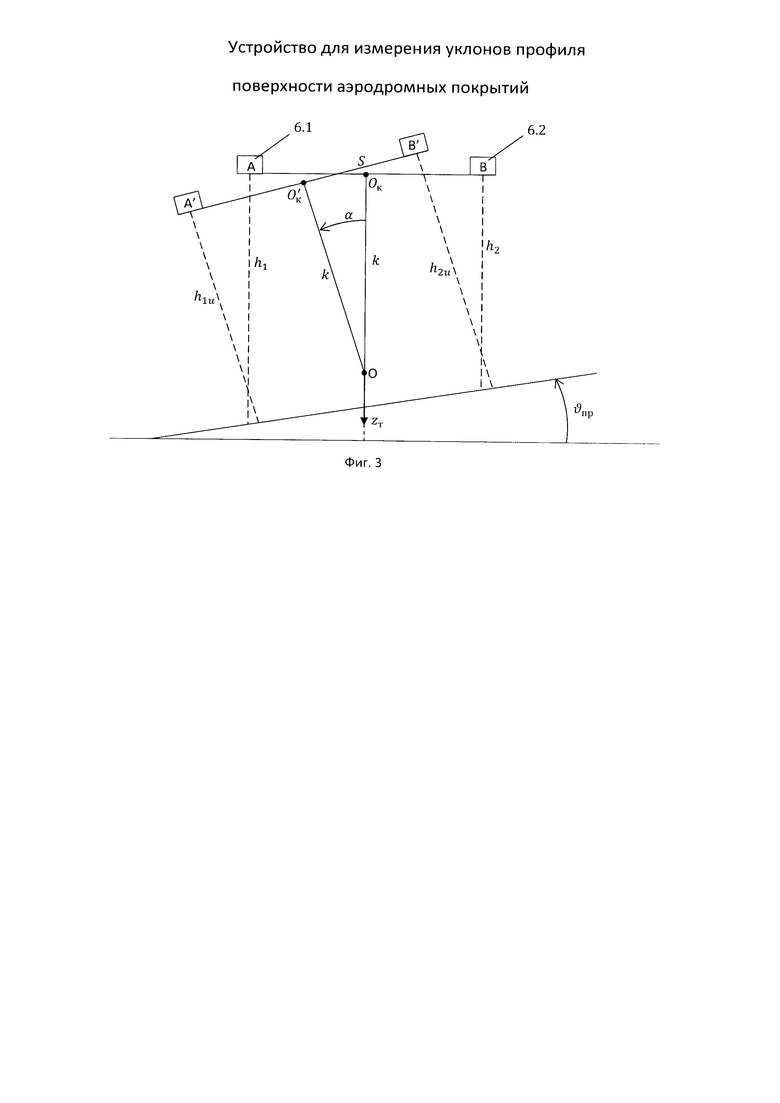
Схема, иллюстрирующая определение величин продольных уклонов ϑпр на основе измерения высоты лазерными дальномерами 6 (6.1, 6.2), расположенными в крайних точках А и В продольной оси кронштейна 5, высот этих точек над профилем поверхности аэродромного покрытия, представлена на фиг. 3. Здесь α - угол поворота от вертикали zт оси ООк кронштейна 5 вокруг оси колес (горизонтируемой плоскости кронштейна 5 от плоскости горизонта); h1, h2 - расстояния по вертикали от крайних точек А и В продольной оси кронштейна 5 до профиля поверхности аэродромного покрытия, измеряемые лазерными дальномерами соответственно 6.1 и 6.2 вдоль их оптических осей при горизонтальном расположении платформы с кронштейном; h1и, h2и - расстояния от крайних точек А, В продольной оси кронштейна 5 до профиля поверхности аэродромного покрытия, измеряемые лазерными дальномерами соответственно 6.1 и 6.2 вдоль их оптических осей при отклонении горизонтируемой плоскости кронштейна 5 платформы от плоскости горизонта на угол α. Очевидно, величина продольного уклона ϑпр определяется соотношением:

где 2s=АВ (фиг. 1) - расстояние между оптическими осями лазерных дальномеров 6.1 и 6.2.
Нетрудно показать, что при отклонении кронштейна 5 от плоскости горизонта на малый угол α с учетом малости величин продольных уклонов ϑпр величины h1и, h2и с точностью до второго порядка малости таковы:


где k=ООк
Линеаризуя соотношения (10), (11), получим для h1, h2:


Подставляя теперь (12) и (13) в (9), имеем:

На основе (14) в канале 19 блока 16 осуществляется определение ϑпр, используя информационные сигналы h1и от лазерного дальномера 6.1, h2и от лазерного дальномера 6.2 и сигнал по α от поперечного датчика угла 8 гироскопического измерителя 7.
Величина поперечного уклона определяется, как и в прототипе, по величине угла β, измеряемого продольным датчиком угла 9 гироскопического измерителя 7.
В соответствии с приведенными описанием устройства и принципом его работы в отличие от известных устройств измерение уклонов профиля поверхности аэродромных (дорожных) покрытий в изобретении осуществляется на борту ОКМ, перемещающегося по поверхности аэродрома автономно без использования автомобиля в качестве движителя ОКМ, а также без его использования в качестве носителя аппаратуры, измеряющей уклоны. Применение автономного ОКМ для измерения уклонов позволяет исключить погрешности измерений, порождаемые влияниями вибраций и колебаний кузова автомобиля на различные измерители (акселерометры, гироскопические измерители, лазерные дальномеры). При установке измерителей на автомобиле вибрации и колебания кузова воздействуют на измерители непосредственно, а при установке измерителей на ОКМ, связанном, как в прототипе, шарнирно с задним мостом базового автомобиля, вибрации и колебания кузова автомобиля передаются на измерители через шарнирные соединения ОКМ с автомобилем. Кроме того, в известных устройствах, в частности в аналоге (патент №RU 2114392) и в прототипе, измерение продольного уклона профиля поверхности аэродромных (дорожных) покрытий осуществляется как измерение угла между плоскостью горизонта, моделируемой гироскопическим измерителем или акселерометром, и профилем поверхности, моделируемой плоскостью осей колес автомобиля (патент №RU 2114392) или плоскостью платформы ОКМ, которая шарнирно связана с задним мостом автомобиля (прототип). При этом моделирование профиля поверхности осуществляется на большой опорной базе, равной, в частности, расстоянию между осями колес автомобиля, что, в свою очередь, приводит к измерению уклонов только «в среднем», без возможности их детализации. В изобретении измерение продольных уклонов осуществляется как измерение углов между плоскостью платформы, моделирующей с помощью гироскопического измерителя плоскость горизонта, и собственно профилем поверхности аэродромного покрытия, непосредственно моделируемой с помощью лазерных дальномеров (измерителей высоты). Такой подход к измерению продольных уклонов позволяет дополнительно повысить точность их измерения. Еще одним фактором, обеспечивающим в изобретении повышение точности измерения уклонов, является использование в управляющих сигналах, поступающих на датчики моментов гироскопического измерителя, компенсирующих сигналов

 ,
,
формируемых на основе информации от датчиков угловых скоростей и угловых ускорений вращения колес и обеспечивающих исключение баллистических погрешностей гироскопического измерителя. Тем самым существенно повышается точность горизонтирования платформы ОКМ, а следовательно, и точность измерения уклонов профиля поверхности аэродромного покрытия.
Использование автономного ОКМ для измерения уклонов предопределяет также существенное уменьшение материальных затрат и трудоемкости работ по сравнению материальными затратами и трудоемкостью работ по измерениям уклонов, имеющим место при использовании в этом процессе автомобиля в качестве движителя ОКМ, а также в качестве носителя измерительной аппаратуры.
Таким образом, изобретение в представленной совокупности признаков объективно обеспечивает повышение точности измерения уклонов профиля поверхности аэродромного покрытия, а также уменьшение материальных затрат и трудоемкости работ по измерению этих уклонов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РОВНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНЫХ ДОРОГ | 2023 |
|
RU2820228C1 |
| Способ определения ровности покрытия автомобильных дорог | 2023 |
|
RU2832694C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНОВ, КРИВИЗНЫ, НЕРОВНОСТИ И КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ДОРОЖНОГО ПОКРЫТИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2162202C1 |
| Устройство для регистрации уклонов | 1978 |
|
SU779804A1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ РОВНОСТИ ПОВЕРХНОСТИ АЭРОДРОМНОГО ПОКРЫТИЯ | 2008 |
|
RU2373323C1 |
| ОДНООСНОЕ КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2333862C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРИВИЗНЫ И УКЛОНОВ ПРОФИЛЯ ПОВЕРХНОСТИ ДОРОЖНОГО ПОКРЫТИЯ В ДВУХ РАЗЛИЧНЫХ НАПРАВЛЕНИЯХ, ПРЕИМУЩЕСТВЕННО В НАПРАВЛЕНИИ ДВИЖЕНИЯ АВТОМОБИЛЯ И В ПОПЕРЕЧНОМ ЕМУ НАПРАВЛЕНИИ | 1996 |
|
RU2114391C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2074829C1 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| Способ начальной выставки в азимуте самоориентирующегося указателя курса с каналами горизонтальной коррекции с невертикальной осью наружной рамки | 1990 |
|
SU1815596A1 |
Изобретение относится к области строительства и эксплуатации аэродромов Технический результат - повышение точности измерения уклонов профиля поверхности аэродромного (дорожного) покрытия, снижение трудоемкости работ по измерению этих уклонов. В устройстве, содержащем транспортный колесный модуль с платформой, гироскопический измеритель углов поворота платформы относительно плоскости горизонта с продольным и поперечным датчиками углов, продольным и поперечным датчиками горизонта, продольным и поперечным датчиками моментов, многоканальный вычислительно-управляющий блок, включающий каналы продольной, поперечной коррекции гироскопического измерителя и канал формирования выходной информации, при этом вход канала продольной коррекции соединен с выходом продольного датчика горизонта, а выход канала продольной коррекции - со входом продольного датчика момента, вход канала поперечной коррекции соединен с выходом поперечного датчика горизонта, а выход канала поперечной коррекции - со входом поперечного датчика момента, входы канала формирования выходной информации соединены с выходами продольного и поперечного датчиков углов гироскопического измерителя, согласно изобретению транспортный колесный модуль с платформой выполнен в виде автономного одноосного колесного модуля, опирающегося на два соосных колеса, управляемых установленными на платформе приводными двигателями, устройство снабжено датчиками угловых скоростей вращения колес, датчиками угловых ускорений вращения колес, измерителями высоты двух крайних точек продольной оси кронштейна платформы над профилем поверхности, каналом управления приводными двигателями в вычислительно-управляющем блоке, при этом выходы датчиков угловых ускорений вращения колес соединены с дополнительными входами канала продольной коррекции, выходы датчиков угловых скоростей вращения колес соединены с дополнительными входами канала поперечной коррекции, а выходы измерителей высоты - с дополнительными входами канала формирования выходной информации, выход поперечного датчика угла гироскопического измерителя дополнительно соединен со входом канала управления приводными двигателями, а выходы канала управления приводными двигателями - с управляющими обмотками этих двигателей. 3 ил.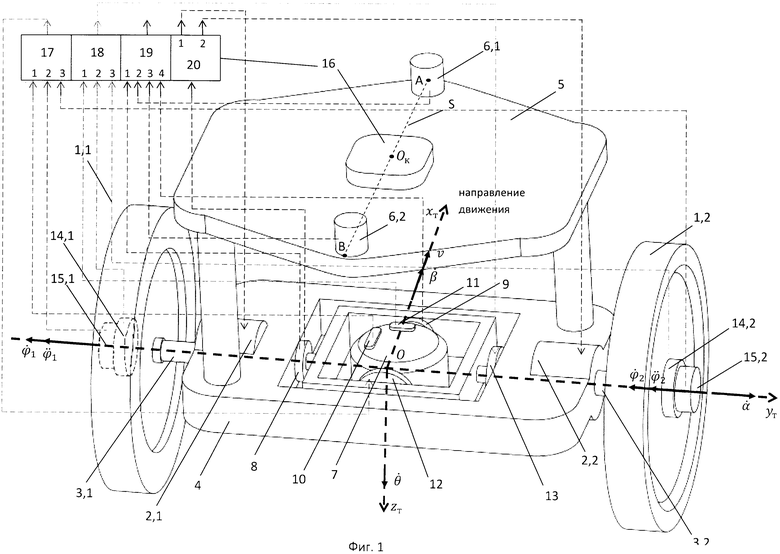
Устройство для измерения уклонов профиля поверхности аэродромных покрытий, содержащее транспортный колесный модуль с платформой, гироскопический измеритель углов поворота платформы относительно плоскости горизонта с продольным и поперечным датчиками углов, продольным и поперечным датчиками горизонта, продольным и поперечным датчиками моментов, многоканальный вычислительно-управляющий блок, включающий каналы продольной, поперечной коррекции гироскопического измерителя и канал формирования выходной информации, при этом вход канала продольной коррекции соединен с выходом продольного датчика горизонта, а выход канала продольной коррекции - со входом продольного датчика момента, вход канала поперечной коррекции соединен с выходом поперечного датчика горизонта, а выход канала поперечной коррекции - со входом поперечного датчика момента, входы канала формирования выходной информации соединены с выходами продольного и поперечного датчиков углов гироскопического измерителя, отличающееся тем, что транспортный колесный модуль с платформой выполнен в виде автономного одноосного колесного модуля, опирающегося на два соосных колеса, управляемых установленными на платформе приводными двигателями, устройство снабжено датчиками угловых скоростей вращения колес, датчиками угловых ускорений вращения колес, измерителями высоты двух крайних точек продольной оси кронштейна платформы над профилем поверхности, каналом управления приводными двигателями в вычислительно-управляющем блоке, при этом выходы датчиков угловых ускорений вращения колес соединены с дополнительными входами канала продольной коррекции, выходы датчиков угловых скоростей вращения колес соединены с дополнительными входами канала поперечной коррекции, а выходы измерителей высоты - с дополнительными входами канала формирования выходной информации, выход поперечного датчика угла гироскопического измерителя дополнительно соединен со входом канала управления приводными двигателями, а выходы канала управления приводными двигателями - с управляющими обмотками этих двигателей.
| ДЕМПФЕР | 1966 |
|
SU214242A1 |
| ПРИЦЕПНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2333852C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ РОВНОСТИ ПОВЕРХНОСТИ АЭРОДРОМНОГО ПОКРЫТИЯ | 2008 |
|
RU2373323C1 |
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |

