Изобретение относится к области транспортного машиностроения и может быть использовано в тяговых электроприводах автономных пневмоколесных транспортных средств, в том числе и внедорожных, например колесных тракторов и автопоездов повышенной проходимости.
Известен способ управления тяговыми усилиями колесных машин с механическим приводом (патент республики Беларусь BY 5929 С1, МПК В60K 41/00, 2004), заключающийся в задании касательных усилий на колесах пропорциональными нормальным нагрузкам на них, измерении усилий, фактически реализуемых колесами машины, обработке и анализе полученных сигналов, регулировании исполнительных механизмов машины в соответствии с проведенным анализом. При этом указанное регулирование вступает в действие при возникновении отрицательного знака производной касательного усилия на каком-либо колесе, что является признаком буксования этого колеса. Прекращение буксования достигается за счет механического подтормаживания соответствующего колеса, что способствует, по мнению авторов, поддержанию степени его проскальзывания в зоне работы на пределе по сцеплению. Этот способ обнаружения буксования и поддержания степени проскальзывания колес многоколесного транспортного средства может быть реализован и при применении тягового электропривода, причем даже с большей экономичностью и эффективностью (за счет уменьшения тягового момента электродвигателя, а не за счет применения механического подтормаживания). Недостатком рассматриваемого способа регулирования является сложность определения реализуемых тяговых усилий и их производных в реальных диапазонах их возможных изменений. Еще более существенным недостатком этого способа является невозможность его применения для внедорожных транспортных средств повышенной проходимости и колесных тракторов. Это связано с тем, что при реализации тяговых усилий колесами указанных транспортных средств во внедорожных условиях, являющихся штатными условиями их работы, не наблюдается явно выраженных максимумов реализуемых ими тяговых усилий в зависимости от степени проскальзывания колес относительно опорной поверхности (см. Н.А.Погарский, А.Д.Степанов. Универсальные трансмиссии пневмоколесных машин повышенной единичной мощности. М.: «Машиностроение», 1976, с.28, рис.5), в связи с чем производные тяговых усилий колес не меняют знака во всем возможном диапазоне изменения степени проскальзывания колес. Поэтому использование изменения знака производной тягового усилия для регулирования параметров приводов таких транспортных средств неэффективно.
Известен другой способ регулирования тяговых усилий колес многоколесного транспортного средства с электроприводом, заключающийся в задании одинаковых для всех тяговых электродвигателей регулируемых параметров и формировании по определенному алгоритму напряжений электродвигателей, измерении сигналов, пропорциональных частотам ni вращения тяговых двигателей и обработке результатов измерений, заключающейся в выделении минимального из них nmin, вычислении предельно допустимого максимального (в условиях достаточного сцепления всех колес с опорной поверхностью и при максимально возможном значении коэффициента k1, определяемого отношением максимально допустимого Rкmax и минимально допустимого Rкmin радиусов качения колес) значения nlin=kl·nmin, разностей Δni=ni-nlim (между измеренными значениями частот вращения колес и вычисленным предельно допустимым значением), определении тех из них, которые превышают величину nlim, и коррекции уставок регулируемых параметров электродвигателей сигналами, пропорциональными Δni. Этот способ реализован в электропередаче тепловоза (Микропроцессорные системы автоматического регулирования электропередачи тепловозов. Под ред. А.В.Грищенко, М.: «Маршрут», 2004, с.153, рис.4.2). В качестве параметров, регулируемых сигналами, пропорциональными Δni, в рассматриваемом способе используют напряжения источников, каждый из которых питает соответствующий тяговый электродвигатель постоянного тока последовательного возбуждения. При возникновении буксования какой-либо колесной пары тепловоза и превышении частоты вращения соответствующего тягового электродвигателя относительно минимальной из частот вращения электродвигателей более, чем на 3% напряжение источника питания электродвигателя буксующей колесной пары уменьшается пропорционально разности между частотой вращения электродвигателя, приводящего буксующую колесную пару, и предельно допустимой частотой вращения, что способствует ограничению начавшегося буксования и реализации буксующей колесной парой тягового усилия, близкого к предельному по условиям ее сцепления с рельсами.
Устройство, реализующее указанный способ, содержит несколько тяговых электродвигателей постоянного тока, подключенных к общему источнику питания посредством индивидуальных выпрямителей, датчики частот вращения электродвигателей, блок выделения минимальной из измеренных частот вращения, блоки расчета разностей между измененными частотами вращения и минимальной из них, блоки расчета углов регулирования управляемых выпрямителей в функции указанных разностей.
Существенное достоинство этого способа в сравнении с ранее рассмотренным - простота реализации измерений контролируемых параметров и инвариантность к виду зависимости тягового усилия, реализуемого буксующим колесом, от степени его проскальзывания относительно опорной поверхности. Недостаток этого способа - невысокая эффективность его применения на пневмоколесных транспортных средствах, имеющих существенно более высокие допустимые расхождения частот вращения тяговых электродвигателей, что обусловлено кинематикой движения таких транспортных средств на поворотах. Поэтому для осуществления возможности регулирования рассматриваемым способом на таких транспортных средствах необходимо увеличивать диапазон допустимых расхождений частот вращения двигателей до 100÷200%, что приведет к недопустимо высоким потерям мощности на проскальзывание колес при движении в условиях ограниченного сцепления.
Другой недостаток этого способа заключается в невозможности его использования в асинхронном тяговом электроприводе, так как для регулирования частот вращения асинхронных электродвигателей изменение подводимых к ним напряжений малоэффективно (см. Ю.К.Розанов и др. Силовая электроника. М.: Издательский дом МЭИ, 2007, с.534).
Технической задачей, решаемой в заявляемых способе и устройстве, является реализация произвольно заданных тяговых усилий ведущих колес транспортного средства при движении в условиях достаточного сцепления колес с опорной поверхностью, а в условиях ограниченного сцепления - реализация тяговых усилий буксующих колес на уровнях, обеспечивающих ограничение частот вращения соответствующих электродвигателей в заданных пределах. Это способствует уменьшению потерь мощности на проскальзывание колес относительно опорной поверхности и тем самым повышению КПД и эффективности выполнения транспортной работы, особенно в условиях эксплуатации пневмоколесных транспортных средств, в том числе и внедорожных.
Указанная задача решается применительно к способу управления тяговым электроприводом многоколесного транспортного средства, согласно которому в каждый момент времени задают величины регулируемых параметров тяговых электродвигателей и по определенному алгоритму формируют напряжения электродвигателей, измеряют частоту вращения ni каждого электродвигателя, где i - порядковый номер электродвигателя, определяют величину и знак угла α, задающего угловое направление движения транспортного средства относительно его продольной оси, вычисляют частоту вращения каждого электродвигателя, приведенную к месту установки какого-либо одного j-го электродвигателя по формуле nпpi=kпрi·ni, где kпpi - коэффициент приведения для i-гo колеса, далее из вычисленных nпpi определяют минимальное значение nпpmin, вычисляют предельно допустимое максимальное значение приведенной частоты вращения электродвигателя по формуле nпplim=(1,07÷1,20)·nпpmin, а также разности частот Δnпpi по формуле Δnпpi=nпpi-nпplim, уменьшают величину ранее заданного регулируемого параметра каждого электродвигателя, у которого Δnпpi>0, на величину, пропорциональную отношению Δnпpi/kпpi, причем kпpi=(µj/µi)·(Rкi/Rкj)·(Rnj)/(Rпi), µi, µj - передаточные числа редукторов, установленных между выходными валами соответствующих электродвигателей и осями приводимых ими колес, Rкi, Rкj - паспортные значения радиусов качения соответствующих колес, Rпi, Rпj - рассчитанные по известным кинематическим соотношениям радиусы траекторий поворота соответствующих колес в функции сигнала α и конструктивных параметров транспортного средства.
При использовании крутящих моментов на валах тяговых электродвигателей в качестве параметров регулирования, которые могут быть заданы для электродвигателей разных осей транспортного средства произвольно, или в соответствии с результатами предварительно выполненных оптимизационных расчетов ранее заданные сигналы уставок крутящих моментов электродвигателей, у которых Δnпрi>0, уменьшают, вычитая из них сигналы, пропорциональные отношениям Δnпрi/kпpi.
При задании значений крутящих моментов на валах тяговых асинхронных электродвигателей сочетанием отношений (Еi/fi) ЭДС Еi, наводимых в обмотках электродвигателей, к частотам fj этих ЭДС и частот fsyi абсолютного скольжения для электродвигателей, у которых Δnпрi>0, ранее заданные fsyi соответствующих электродвигателей уменьшают, вычитая из них сигналы, пропорциональные отношениям Δnпрi/kпрi.
При применении предлагаемого способа и устройства в асинхронных электроприводах с векторным управлением (например, патент RU (11) 2193814 (13) С2. Устройство и способ управления асинхронным электродвигателем, Н02Р 21/00), использующих при регулировании моментообразующую Iq и намагничивающую Id составляющие статорного тока электродвигателей, в качестве первого параметра регулирования по предлагаемому способу используют активную составляющую тока статора, а в качестве второго параметра регулирования - его намагничивающую составляющую. При этом ранее заданные уставки моментообразующих Iqi составляющих статорных токов электродвигателей, у которых Δniпp≥0, уменьшают, вычитая из них сигналы, пропорциональные отношениям Δnпрi/kпpi.
При формировании напряжений Ui электродвигателей посредством преобразователей, питаемых от одного источника постоянного тока с выходным напряжением Uп, напряжение на выходе каждого преобразователя определяется формулой:

где kрi - коэффициент регулирования i-гo преобразователя (kрi=0÷1);
Umax - максимально возможное напряжение при kрi=1 (Umax=kcx·Uп);
kcx - коэффициент, определяемый схемой соединения преобразователя.
При таком питании электродвигателей требуемое отношение (Еi/fi) для всех электродвигателей может быть обеспечено заданием такого же значения отношения (Umax/nmax) для электродвигателя, имеющего максимальную частоту вращения nmax, и ограничением величин коэффициентов kрi остальных преобразователей на уровнях:


Устройство для осуществления предлагаемого способа содержит тяговый электропривод, включающий в себя не менее двух тяговых электродвигателей, каждый из которых подключен посредством соответствующего преобразователя напряжения, имеющего вход частоты вращения электродвигателя, вход ограничения напряжения преобразователя и два входа задания, соответственно первого и второго параметров регулирования к общему источнику питания, датчики частоты вращения тяговых электродвигателей, блоки задания уставок соответственно первого и второго параметров регулирования, блоки коррекции уставок первого параметра регулирования, каждый из которых имеет задающий и корректирующий входы, блок задания направления движения, блок приведения частот вращения электродвигателей к одному электродвигателю, блок выделения минимального сигнала, блок расчета корректирующих сигналов, блок расчета предельных значений коэффициентов регулирования напряжений преобразователей, при этом выход каждого датчика частоты вращения соединен с входом частоты вращения электродвигателя соответствующего преобразователя, а также с соответствующими входами блока приведения и блока расчета предельных значений коэффициентов регулирования напряжений преобразователей, каждый выход блока приведения соединен с соответствующими входами блока выделения минимального сигнала и блока расчета корректирующих сигналов, каждый выход которого соединен с корректирующим входом соответствующего блока коррекции уставки первого параметра регулирования, задающий вход которого соединен с соответствующим выходом блока задания уставки первого параметра регулирования, выход каждого блока коррекции соединен с первым задающим входом соответствующего преобразователя напряжения, причем выход блока задания направления движения соединен с дополнительным входом блока приведения, выход блока выделения минимального сигнала соединен с дополнительным входом блока расчета корректирующих сигналов, каждый выход блока расчета предельных значений коэффициентов регулирования напряжений преобразователей соединен с входом ограничения напряжения соответствующего преобразователя напряжения, а выход блока задания второго параметра регулирования соединен со вторыми задающими входами преобразователей напряжения.
Указанное приведение измеренных параметров к одному двигателю позволяет исключить влияние расхождений частот вращения колес разных бортов транспортного средства, вызванных движением в повороте, а также влияние конструктивных расхождений радиусов качения колес и передаточных чисел редукторов разных осей транспортного средства на результаты сравнения значений частот вращения, приведенных к одному из электродвигателей. Благодаря этому разности между приведенными частотами вращения электродвигателей, которые при движении в условиях достаточного сцепления зависят только от расхождений радиусов качения Rкi соответствующих колес, при движении в условиях ограниченного сцепления могут свидетельствовать и о степени проскальзывания отдельных колес относительно опорной поверхности. С учетом того что максимально допустимые относительные расхождения радиусов качения реальных транспортных средств регламентированы эксплуатационной документацией и находятся в пределах Rкmax/Rкmin=(1,05÷1,1), признаком буксования какого-либо колеса является превышение с учетом возможной погрешности расчета в 1,07÷1,2 раза приведенной частоты вращения соответствующего электродвигателя относительно минимальной из приведенных частот вращения. Использование этого признака позволяет уменьшить величину коэффициента k1, определяемого реальным диапазоном возможных расхождений частот вращения колес при движении в повороте с 1,5÷2,0, даже с учетом возможных погрешностей расчета, до 1,07÷1,2.
Использование значений вращающих моментов на валах электродвигателей (а не напряжений, как это сделано в прототипе) в качестве параметров, регулируемых сигналами Δnпpi/kпpi, делает возможным применение этого способа во всех современных тяговых электроприводах, при регулировании которых выполняются расчеты крутящих моментов на их валах независимо от типов используемых в них тяговых электродвигателей. При этом всем электродвигателям задают определенные значения крутящих моментов на их валах, например, пропорциональные вертикальным нагрузкам на соответствующие колеса, а при Δnпpi>0 заданные значения крутящих моментов соответствующих электродвигателей уменьшают, вычитая из них сигналы, пропорциональные отношениям Δnпpi/kпpi.
В зависимости от распределения вертикальных нагрузок между осями транспортного средства, определяемого его конструкцией, задаваемые крутящие моменты могут быть одинаковыми для всех электродвигателей (при равномерном распределении вертикальных нагрузок между осями) или пропорциональными вертикальным нагрузкам на соответствующие колеса (при неравномерном распределении вертикальных нагрузок между осями), благодаря чему выравниваются сцепные возможности всех колес транспортного средства, что способствует повышению тяговых свойств транспортного средства при его движении в условиях ограниченного сцепления.
При применении асинхронных электродвигателей, величина момента Mi на валу каждого из которых, как известно (см. Ю.К.Розанов и др. Силовая электроника. М.: Издательский дом МЭИ, 2007, с.536), пропорциональна произведению отношения (Еi/fi) первой гармоники ЭДС Еi к частоте fi на частоту fsi абсолютного скольжения, задание требуемых значений крутящих моментов в этом случае может быть обеспечено заданием определенных (для всех электродвигателей или для электродвигателей каждой оси) значений параметра (E/f)y и значений частот fsyi абсолютного скольжения.
При ухудшении условий сцепления каких-либо колес и увеличениях в связи с этим измеренных и приведенных частот вращения соответствующих электродвигателей сигналы уставок fsyi электродвигателей, у которых Δnпpi≥0, корректируют в сторону уменьшения, вычитая из них сигналы, пропорциональные отношениям Δnпpi/kпpi.
Предложенный способ регулирования способствует в сравнении с прототипом уменьшению потерь мощности на проскальзывание колес при движении в условиях ограниченного сцепления благодаря тому, что сравнение частот вращения электродвигателей с целью определения недопустимого проскальзывания приводимых ими колес осуществляется после умножения результатов измерения частот вращения на коэффициенты приведения, а коррекция регулируемых параметров осуществляется сигналами, пропорциональными разностям между приведенными частотами вращения электродвигателей и предельно допустимой приведенной частотой вращения после деления полученных результатов на соответствующие коэффициенты приведения. Использование в качестве параметров регулирования сигналов fs и (E/f), или, соответственно, моментообразующей и намагничивающей составляющих тока, потребляемого электродвигателем, соответственно Iq и Id, позволяет применить предложенный способ в тяговых электроприводах с асинхронными электродвигателями, а при использовании для этого крутящих моментов предложенный способ применим в тяговых электроприводах с любым типом электродвигателей,
При регулировании по предлагаемому способу применительно к транспортному средству, например с одинаковыми вертикальными нагрузками на каждую ось, работа тяговых электродвигателей в режиме выравнивания реализуемых ими моментов может быть обеспечена заданием одинаковых для всех электродвигателей уставок абсолютных скольжений fsy и регулированием отношений амплитуд Еi ЭДС первых гармоник обмоток электродвигателей к частотам fi этих ЭДС таким образом, чтобы обеспечить работу электродвигателей с магнитными потоками, соответствующими предварительно рассчитанным значениям отношений (E/f)y. При этом частоты первых гармоник напряжений, формируемых соответствующими преобразователями напряжения, могут быть рассчитаны в соответствии с выражением:

где р - число пар полюсов электродвигателя.
Первые гармоники напряжений Ui могут быть рассчитаны в соответствии с выражением:

где ΔU - падение напряжения в обмотках статора (влияние этого параметра на величину напряжения Ui может быть рассчитано при известных значениях фазного тока и частоты).
Как следует из (4), регулирование по этой формуле способствует повышению напряжений электродвигателей с более высокими частотами вращения и снижению напряжений с более низкими частотами вращения (независимо от причины, вызвавшей указанное неравенство частот вращения). Этому же способствует и ограничение коэффициента kpi в соответствии с (2). Поэтому по мере повышения скорости движения и, соответственно, повышения напряжений Ui вступают в работу каналы ограничения коэффициентов kpi преобразователей напряжения, которые действуют совместно с регулированием по (4). При этом на малых скоростях и прямолинейных участках регулирование напряжений Ui осуществляется в основном по (4), а при высоких скоростях и на поворотах - в основном по (2).
Исходя из подобия векторных диаграмм i-го и j-го электродвигателей при регулировании их напряжений Ui и Uj в соответствии с (2) при задании им одинаковых значений абсолютных скольжений fsi=fsj (с коэффициентом подобия, равным отношению напряжений Ui/Uj), автоматически обеспечивается равенство Ei/fi=Ej/fj что, как было указано выше, способстует выравниванию тяговых усилий колес транспортного средства при движении в условиях достаточного сцепления.
Следует отметить, что указанное подобие характерно только для достаточно высоких частот fi, при которых влияние активных сопротивлений обмоток электродвигателей, которые не зависят от частоты напряжения Ui, несущественно в сравнении с их индуктивными сопротивлениями, которые пропорциональны частоте этого напряжения.
Реализация различных моментов тяговых электродвигателей при необходимости, вызванной ухудшением условий сцепления соответствующих колес транспортного средства (с одинаковыми для всех колес паспортными значениями радиусов качения и передаточными числами редукторов) при прямолинейном движении, может быть обеспечена изменением в меньшую сторону сигнала fsyi сигналом коррекции

где Δni=ni-nlim, а nlim - предельно допустимая частота вращения колес, рассчитанная с учетом возможных технологических расхождений радиусов качения колес:

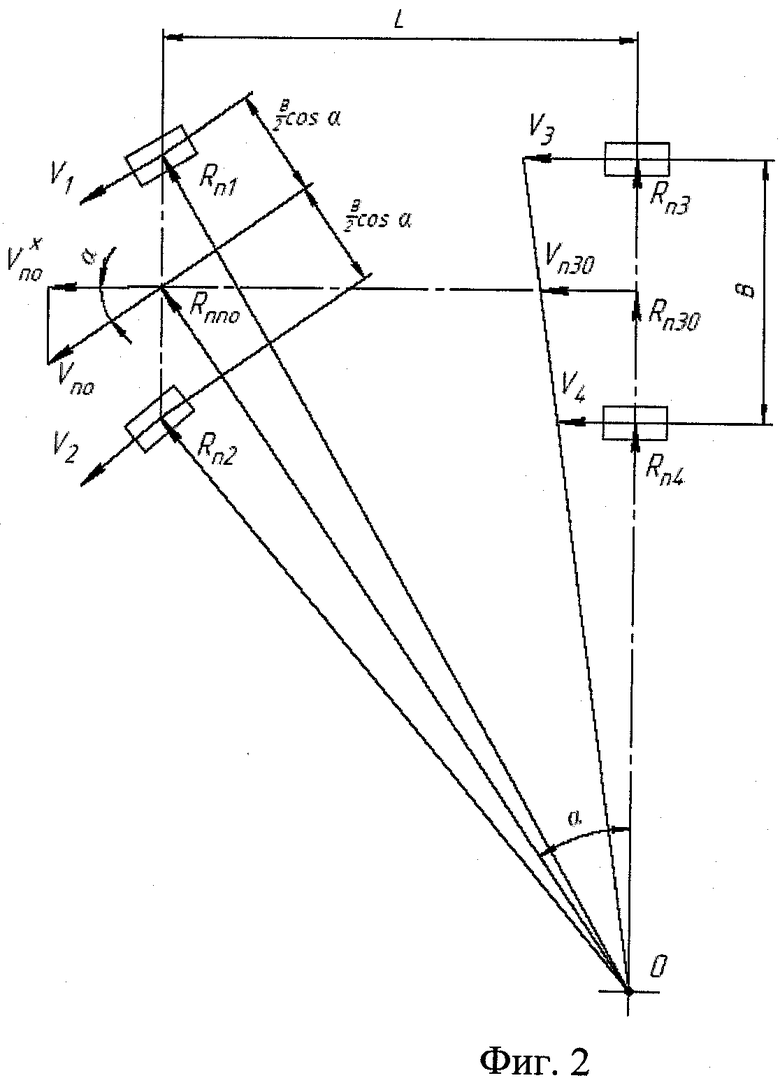
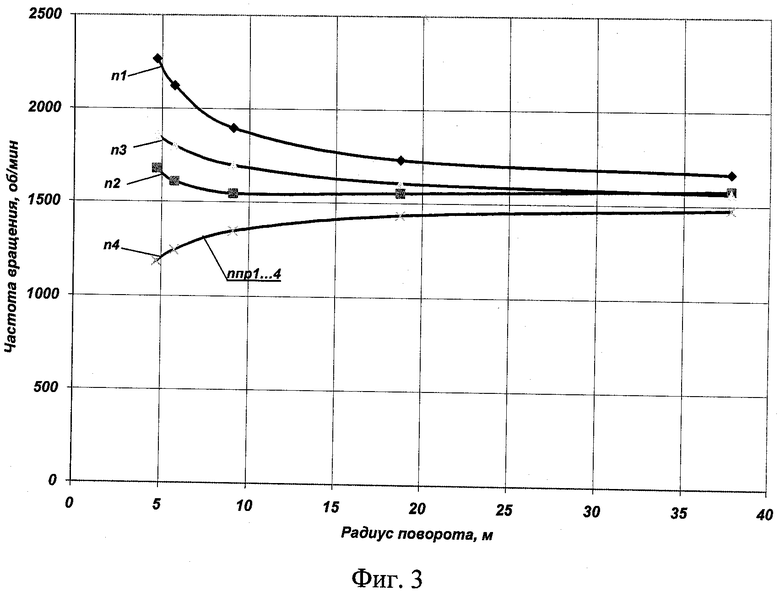
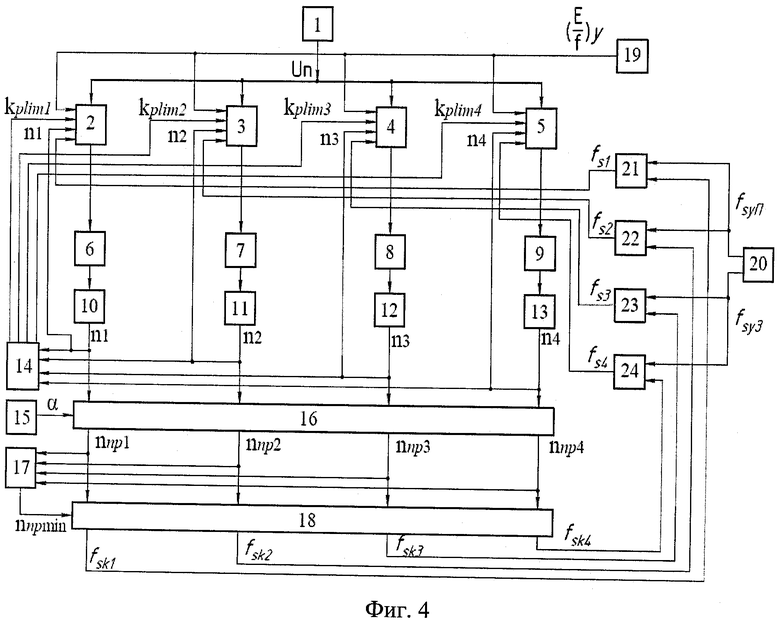
Предлагаемый способ и устройство для его реализации иллюстрируются рисунками, представленными на фиг.1-4. На фиг.1 - зависимости моментов на валах асинхронных тяговых электродвигателей от их частот вращения, рассчитанные при одинаковых значениях уставок второго параметра регулирования (E/f)y, задающих требуемые значения отношений Ei/fi; на фиг.2 - кинематическая схема взаимосвязи линейных скоростей Vi движения колес транспортного средства и его углового направления α движения относительно продольной оси; на фиг.3 - зависимости расхождений реальных частот вращения тяговых электродвигателей и частот вращения, приведенных к одному электродвигателю от радиуса поворота Rп при постоянной линейной скорости транспортного средства; на фиг.4 - блок-схема устройства, реализующего предлагаемый способ регулирования.
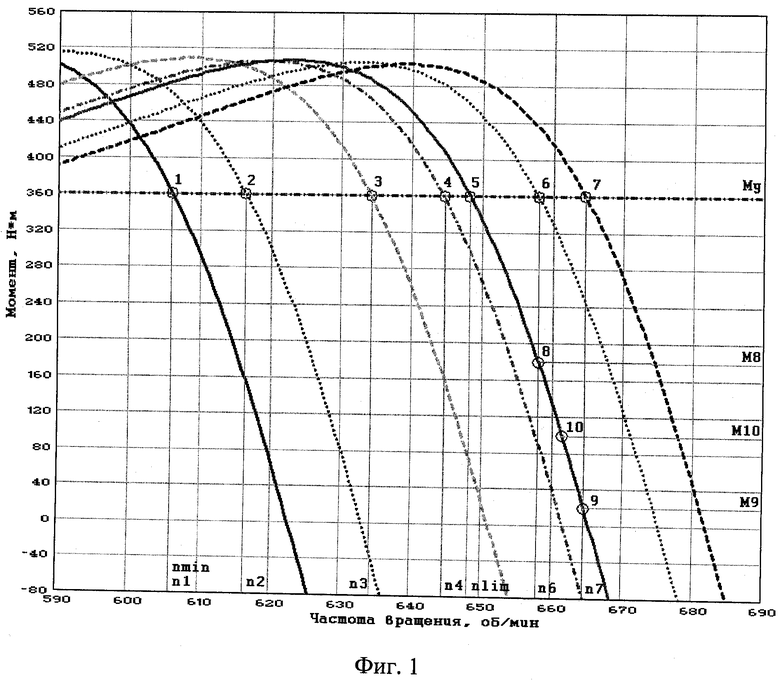
Представленные на фиг.1 зависимости Mi(ni) рассчитаны при Ei/fi=const для асинхронных электродвигателей 4-колесного трактора, приводящих колеса с одинаковыми для всех колес паспортными значениями радиусов качения и передаточных чисел редукторов, при его прямолинейном движении.
При движении в условиях достаточного сцепления колес трактора с опорной поверхностью с крутящими моментами М1=М2=М3=М4=Му на валах электродвигателей точки 1, 2, 3 и 4 соответствуют частотам вращения электродвигателей колес с радиусами качения, различие значений которых (Rк1>Rк2>Rк3>Rк4) обусловлено только технологическими расхождениями, точки 5, 6, 7, 8, 9 и 10 соответствуют возможным режимам работы электродвигателей при буксовании приводимых ими колес, а именно точка 1 соответствует электродвигателю с минимальной частотой вращения nmin=606 об/мин, точки 2-4 - электродвигателям с более высокими частотами вращения, значения которых не превосходят предельно допустимого значения nlim=648 об/мин (при принятой величине коэффициента k1=1,07), соответствующего точке 5. Точки 6 и 7 соответствуют частотам вращения двух колес, соответственно, буксующих с различной степенью проскальзывания относительно опорной поверхности при отсутствии сигналов коррекции (fкi=0), точки 8 и 9 - аналогичные по частотам вращения точкам 6 и 7, но при действии сигналов коррекции fki, определяемых по (5). Если при этом предельные значения тяговых усилий буксующих колес пропорциональны крутящим моментам, соответственно М8 и М9, то установившиеся режимы работы электродвигателей, приводящих указанные буксующие колеса, будут соответствовать точкам 8 и 9. Если же предельные по условиям сцепления буксующих колес моменты на валах приводящих их электродвигателей одинаковы и равны, например, M10, то регулирование предлагаемым способом будет способствовать установлению одинаковых для обоих двигателей режимов, соответствующих точке 10.
Однако при движении в повороте использование рассчитанного по (5) сигнала fкi при принятой величине коэффициента ki может привести к нежелательному уменьшению крутящих моментов, реализуемых колесами внешнего борта транспортного средства, и соответствующему ухудшению тяговых свойств электропривода. Устранение этого явления может быть обеспечено увеличением коэффициента k1 однако это неприемлемо, так как при движении на повороте в условиях ограниченного сцепления это сопряжено с возможным существенным увеличением потерь мощности на проскальзывание колес внутреннего борта.
Этот недостаток устраняется благодаря тому, что сравнение частот вращения с целью определения буксующих колес при регулировании по предложенному способу осуществляется после умножения результатов измерения частот вращения на коэффициенты приведения, а коррекция регулируемых параметров по результатам этого сравнения осуществляется сигналами, пропорциональными разностям между приведенными значениями частот вращения сравниваемых электродвигателей, после деления значений этих сигналов на соответствующие коэффициенты приведения.
Коэффициенты приведения частот вращения электродвигателей могут быть рассчитаны по соотношениям, учитывающим взаимосвязи конструктивных параметров (ширина колеи В, база L, геометрические места установки колес, паспортные значения радиусов качения колес и передаточные числа редукторов, установленных между валами электродвигателей и осями приводимых ими колес) и угловое направление движения транспортного средства относительно его продольной оси.
Например, применительно к тяговому электроприводу полноприводного 4-колесного трактора, кинематическая схема движения которого представлена на фиг.2, при приведении частот вращения всех электродвигателей к частоте вращения 4-го электродвигателя коэффициенты приведения ki могут быть рассчитаны по формулам:
kпp1=(µ4/µ1)·(Rк1/Rк4)·(L·cosα-B/2·sinα)/(L+B/2·sinα·cosα);
kпp2=(µ4/µ2)·(Rк2/Rк4)·(L·cosα-B/2·sinα)/(L-B/2·sinα·cosα);
kпp3=(µ4/µ3)·(Rк3/Rк4)·(L·cosα-B/2·sinα)/(L·cosα+B/2·sinα);
kпp4=(µ4/µ4)·(Rк4/Rк4)=1.
В качестве примера на фиг.3 представлены зависимости от радиуса поворота задней оси Rп=RпЗО измеренных n1, n2, n3, n4 и приведенных nпр1, nпр2, nпр3, nпр4 частот вращения, рассчитанные для реального трактора (с параметрами: В=2,1 м; L=3,3 м; Rк1=Rк2=0,783 м; Rк3=Rк4=0,985 м; µ1=µ2=53; µ3=µ4=62,7) при движении с постоянной поступательной скоростью средней точки задней оси VпЗО=9 км/ч в условиях достаточного сцепления (без учета возможных технологических и эксплуатационных расхождений значений радиусов качения колес).
Как следует из этого рисунка, измеренные значения частот вращения электродвигателей при достаточно малых значениях Rп при движении в условиях достаточного сцепления могут в 2 и более раза превосходить минимальные из них, а приведенные частоты вращения всех электродвигателей при этом одинаковы во всем возможном диапазоне изменения Rп: nпр1=nпр2=nпр3=nпр4. Это позволяет использовать результаты сравнения приведенных частот вращения для выявления двигателей, частоты вращения которых не соответствуют результатам расчетов, выполненных для условий достаточного сцепления всех колес с опорной поверхностью, и следовательно, дает возможность определить двигатели, приводящие буксующие колеса.
Следует отметить, что зависимости моментов на валах электродвигателей от их частот вращения, приведенных к одному двигателю, аналогичны зависимостям, представленным на фиг.1, но в отличие от последних не изменяются при изменении кривизны траектории движения транспортного средства. Поэтому они могут быть использованы при оценке эффективности предложенного технического решения не только, как было указано, при прямолинейном движении, но и на поворотах.
В связи с тем что в реальных условиях эксплуатации указанная выше погрешность, определяемая технологическими и эксплуатационными расхождениями радиусов качения колес, находится в пределах 7÷10%, то критерием начавшегося буксования какого-либо колеса может служить превышение на 7÷20% приведенной частоты вращения соответствующего электродвигателя над минимальной из рассчитанных приведенных частот вращения остальных электродвигателей.
Таким образом, возможность выявления и ограничения буксования колес на указанном уровне при использовании предложенного способа расширяет в сравнении с прототипом возможную область его применения для регулирования тяговых электроприводов пневмоколесных машин.
Использование крутящих моментов Мi на валах электродвигателей или частот fsi в качестве параметров, регулируемых сигналами Δnпpi/kпpi, позволяет расширить область применения предложенного способа для регулирования тяговых электроприводов с любым типом тяговых электродвигателей, в том числе и с асинхронными электродвигателями.
Представленное на фиг.4 устройство содержит источник 1 питания, преобразователи напряжения 2, 3, 4 и 5, асинхронные тяговые двигатели 6, 7, 8 и 9, датчики 10, 11, 12 и 13 частоты вращения двигателей, блок 14 расчета предельных значений коэффициентов kpilim регулирования напряжений преобразователей, блок 15 задания направления движения, блок 16 приведения частот вращения тяговых двигателей к одинаковым кинематическим параметрам, блок 17 выделения минимального сигнала, блок 18 расчета корректирующих сигналов, блок 19 задания вторых параметров (E/f)y регулирования, блок 20 задания первых параметров регулирования fsyп электродвигателей передней и fsyз электродвигателей задней осей, блоки 21 и 22 коррекции уставок первых параметров регулирования соответственно первого и второго электродвигателей, блоки 23 и 24 коррекции уставок первых параметров регулирования соответственно третьего и четвертого электродвигателей.
Электропривод работает следующим образом.
От источника 1 на силовые входы преобразователей напряжения 2, 3, 4 и 5 подается питающее их напряжение Uп, а на управляющие входы преобразователей поступают сигналы, информирующие о частотах вращения ni соответствующих электродвигателей, сигналы задания первого и второго параметров регулирования, в качестве которых используются соответственно абсолютные скольжения fsyi, которые должны быть обеспечены в процессе регулирования, и сигнал (E/f)y, которым задается отношение ЭДС, наводимой в статорной обмотке каждого электродвигателя к частоте этой ЭДС, а также сигналы ограничения коэффициентов kplimi регулирования напряжения.
Следует отметить, что при описании работы электропривода предполагалось трехзонное регулирование параметров тягового электропривода (Теория и расчет тягового привода электромобилей. Ефремов И.С. и др. М.: «Высшая школа», 1984, с.121). При этом в первой зоне (до выхода в режим ограничения по мощности) система автоматического регулирования (САР) задает постоянные значения (E/f)y, fsyп и fsyз. Во второй зоне (до выхода в режим ограничения по напряжению) одновременным и пропорциональным регулированием параметров fsyп и fsyз поддерживается постоянство мощности, потребляемой от источника, при постоянном значении параметра (E/f)y, в третьем (ограничение по напряжению) регулированием параметра (E/f)y обеспечивается изменение частоты вращения электродвигателей при постоянном значении напряжения источника питания, а регулированием параметров fsyп и fsyз поддерживается постоянство мощности.
САР, обеспечивающая указанные законы изменения уставок параметров (E/f)y, fsyп и fsyз, предполагается аналогичной САР тягового электропривода с одним тяговым электродвигателем, законы взаимосвязи задаваемых уставок указанных параметров могут быть иными (например, рассчитанными с учетом обеспечения максимума КПД электродвигателей). Элементы САР, выполняющие расчеты и задания указанных уставок, на схеме не показаны, так как не входят в предмет заявляемого технического решения, обеспечивающего заданное (например, равномерное) распределение тяговых усилий между колесами при движении в условиях достаточного сцепления с опорной поверхностью и эффективное ограничение буксования отдельных колес при ухудшении их условий сцепления.
При движении на низких скоростях электродвигатели работают в первой зоне регулирования, в которой поддерживается постоянное значение магнитного потока, характеризуемое максимальным значением второго параметра регулирования (E/f)y, задаваемого значением сигнала на выходе блока 19, соединенного с соответствующими управляющими входами преобразователей напряжения 2-5. При низких скоростях движения напряжения на обмотках электродвигателей и, соответственно, напряжения на выходах преобразователей 2, 3, 4, и 5 невелики, поэтому при движении в этих режимах каналы ограничений коэффициентов kpi не работают. На основании информации, поступающей на управляющие входы преобразователей напряжения 2, 3, 4 и 5 последние формируют напряжения с частотами fi, определяемыми из (3), и действующими значениями первых гармоник Ui, определяемыми из (4), которые подаются на выводы тяговых электродвигателей 6, 7, 8 и 9. При этом на валах электродвигателей реализуются частоты вращения ni и моменты Mi=f(Ui, fi, ni).
Сигналы, пропорциональные частотам вращения n1, n2, n3 и n4, измеренные датчиками частоты вращения 10, 11, 12 и 13, подаются на соответствующие входы блока 16 приведения, на дополнительный вход которого поступает сигнал из блока 15 задания направления движения. В блоке 16 выполняются расчеты приведенных частот вращения по формуле:

результаты которых подаются с выходов блока 16 на соответствующие входы блоков 17 и 18.
В блоке 17 приведенные частоты вращения всех электродвигателей сравниваются между собой и выделяется минимальная из них, которая подается на дополнительный вход блока 18. В блоке 18 вычисляется предельно допустимая приведенная частота вращения электродвигателей

и разности

В этом же блоке 18 знаки сигналов Δnпpi анализируются и для электродвигателей, у которых Δnпpi≥0, по аналогии с (5) рассчитываются корректирующие сигналы fki:

которые подаются на корректирующие входы блоков 21, 22, 23 и 24 коррекции.
Пусть, для определенности, расхождения радиусов качения колес не превышают 7%. Тогда при движении в условиях достаточного сцепления и величине коэффициента k1=1,07 для всех двигателей Δnпpi≤0, а сигналы fк1, fк2, fк3 и fк4 на выходах блока 18 равны нулю, в результате чего из блоков 21, 22, 23 и 24 коррекции на входы задания первого параметра регулирования преобразователей напряжения 2 и 3 поступают сигналы задания уставок абсолютного скольжения электродвигателей передней оси fs1=fs2=fsyп, а на входы преобразователей напряжения 4 и 5 - сигналы задания уставок абсолютного скольжения электродвигателей задней оси
fs3=fs4=fsyЗ.
Применительно к транспортному средству с равномерным распределением вертикальных нагрузок между его осями заданием с выходов блока 20 одинаковых сигналов fsyп=fsyз и выполнением условия Ei/fi=(E/f)y может быть обеспечено выравнивание крутящих моментов Мi электродвигателей и с точностью до расхождений радиусов качения колес, - выравнивание их тяговых усилий, что способствует более полному использованию сцепного веса транспортного средства.
С увеличением скорости движения и увеличением в соответствии с этим значений kpi согласно (2) начинают действовать каналы ограничения этих параметров на уровнях kpi≤ni/nmax, которые, как было указано выше, могут действовать совместно с регулированием по (4) или без него.
При достижении скорости, при которой электропривод начинает работать в зоне ограничения мощности, сигналами САР (на схеме не показана) одновременным и пропорциональным регулированием fsyп и fsyз задается требуемое значение мощности, потребляемой электроприводом. Уставка параметра (E/f)y задается такой же, как и при работе в первой зоне.
После достижения скорости, при которой величина коэффициента kpi становится равной 1 хотя бы для одного из преобразователей 2-5, электропривод переходит в третью зону регулирования. При работе в этой зоне дальнейшее повышение скорости движения (которая, как известно, пропорциональна частоте fi напряжения, питающего электродвигатель) при ограниченном по (1) значении величины Ui и, следовательно, величины Ei может осуществляться только за счет уменьшения соотношения Ei/fi, задаваемого параметром (E/f)y. Требуемая зависимость изменения параметра (E/f)y от скорости движения обеспечивается сигналами САР (на схеме не показана). Поддерживание требуемого значения мощности, потребляемой электроприводом, осуществляется, как и при работе во второй зоне, одновременным и пропорциональным регулированием параметров fsyп и fsyз.
Таким образом, расчет сигналов fki, корректирующих величины абсолютных скольжений fsi электродвигателей, с учетом приведения частот вращения всех электродвигателей к одному из них в соответствии с (10) обеспечивает работу всех электродвигателей с одинаковыми значениями параметров Ei/fi=(E/f)y и fsi=fsyп=fsyз при достаточных условиях сцепления колес транспортного средства при величине коэффициента k1=1,07, рассчитанной исходя из возможного расхождения частот вращения колес по причине расхождений их радиусов качения. Это, в свою очередь, обеспечивает работу всех электродвигателей с одинаковыми значениями параметров Ei/fi=(E/f)y и fsi=fsyп=fsyз - Последним достигается выравнивание моментов на выходных валах тяговых электродвигателей и тем самым выравнивание тяговых усилий всех колес не только при прямолинейном движении, но и на поворотах.
Работу тягового электропривода в условиях ограниченного сцепления колес при регулировании в соответствии с предлагаемым способом рассмотрим, используя зависимости, представленные на фиг.1.
При движении в условиях ограниченного сцепления колес, приводимых, например, вторым и четвертым электродвигателями (в условиях достаточного сцепления работавших в точках 2 и 4 соответственно), величина крутящего момента Му=360 Н-м, задаваемого для всех электродвигателей параметрами fsyп и fsyз, может оказаться более высокой, чем предельные моменты Мlim2 и Мlim4 (например, Мlim2=180 Н·м, Мlim4=20 Н·м), которые могут быть реализованы электродвигателями, приводящими эти колеса. В этом случае под действием разностей моментов ΔМ2=360-180=180 Н·м и ΔМ4=360-20=340 Н·м соответствующие колеса входят в буксование, в результате чего повышаются сигналы n2 и n4 на выходах датчиков частоты вращения 11 и 13 и, соответственно, сигналы nпр2 и nпр4 на выходах блока 16 и входах блока 17. При превышении nпр2 и ппр4 величины nпplim=k1·nпрmin соответствующие сигналы Δnпр2 и Δnпр4 становятся положительными, и на выходах блока 18 появляются рассчитанные по (10) корректирующие сигналы fsk2 и fsk4:
fsk2=(p/60)·Δnпp2/kпp2 и fsk4=(p/60)·Δnпp4/kпp4,
которые подаются на входы блоков 22 и 24 коррекции, в результате чего на соответствующие входы преобразователей напряжения 3 и 5, питающих электродвигатели 7 и 9, подаются скорректированные сигналы:
fs2=fsyп(p/60)·Δnпp2/kпp2 и fs4=fsyз(p/60)·Δnпp4/kпp4.
Это приводит к формированию напряжений, подаваемых на выводы второго и четвертого электродвигателей, соответствующих внешним характеристикам этих электродвигателей, проходящим через точку 5, что, в свою очередь, приводит к уменьшению моментов на валах второго и четвертого электродвигателей до 180Н·м и 20Н·м соответственно.
Эффективность рассматриваемого способа ограничения буксования при изменениях условий сцепления указанных колес трактора можно оценить по увеличению их частот вращения, обусловленному дополнительным относительным проскальзыванием δ2 и δ4:
δ2=(n8-n2)/n2=(658-617)/617·100=6,65%;
δ4=(n9-n4)/n4=(664-644)/l050·100=3,1%.
При восстановлении сцепления какого-либо из ранее буксующих колес момент сопротивления на валу соответствующего электродвигателя возрастает, что приводит к уменьшению его частоты вращения n1 до величины, соответствующей nпрlim. При этом обнуляется корректирующий сигнал fski на соответствующем выходе блока 18, в результате чего сигнал задания частоты абсолютного скольжения на выходе соответствующего блока коррекции и на входе соответствующего преобразователя напряжения становится равным fsyп (или fsyз), а крутящий момент Mi на валу этого электродвигателя - равным моментам на валах электродвигателей небуксующих колес. Наличие при этом дополнительного момента сопротивления, вызванного повышенным проскальзыванием рассматриваемого колеса в момент пропадания (когда nпрi=nпрlim) сигнала fski (и далее, до тех пор, пока колесо не восстановит полного сцепления с опорной поверхностью), способствует уменьшению частоты вращения этого колеса до уровня, соответствующего степени проскальзывания остальных небуксующих колес.
Предложенный способ и устройство для его осуществления применимы и для тяговых электроприводов, в которых требуется неравномерное распределение тяговых усилий между колесами разных осей, а также для асинхронных электроприводов с векторным управлением.
Требуемая неравномерность распределения тяговых усилий может быть обеспечена заданием неодинаковых значений параметров fsy (fsyп≠fsyз) для электродвигателей разных осей транспортного средства.
При применении способа и устройства в асинхронных электроприводах с векторным управлением, использующих при регулировании моментообразующую и намагничивающую составляющие статорных токов электродвигателей, в качестве первого параметра регулирования по предлагаемому способу следует использовать моментообразующую составляющую тока статора, а в качестве второго параметра регулирования - его намагничивающую составляющую.
Таким образом, предложенный способ и устройство для его осуществления обеспечивает заданное распределение тяговых усилий между ведущими колесами транспортного средства при движении в условиях достаточного сцепления как при прямолинейном движении, так и на поворотах, а также эффективное ограничение частот вращения буксующих колес путем задания уставок регулируемых параметров (Е/f)У и fsiy и последующей коррекцией параметров fsi сигналами fsкi, рассчитанными с учетом приведения частот вращения всех электродвигателей к одному из них.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИМАЛЬНОГО РЕГУЛИРОВАНИЯ ТЯГОВОГО ЭЛЕКТРОПРИВОДА АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА С АСИНХРОННЫМИ ТЯГОВЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ | 2013 |
|
RU2547123C1 |
| Способ управления индивидуальным тяговым электроприводом ведущих колес многоколесного транспортного средства | 2023 |
|
RU2797069C1 |
| Устройство для управления транспортным средством | 1989 |
|
SU1740211A1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2548832C2 |
| Устройство регулирования тягового электропривода | 1981 |
|
SU994314A1 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2013 |
|
RU2534597C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ ПОДВИЖНЫМ СОСТАВОМ | 2000 |
|
RU2179515C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ С ЭЛЕКТРОПРИВОДОМ (ВАРИАНТЫ) | 2000 |
|
RU2192974C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2187437C1 |
Группа изобретений относится к области транспортного машиностроения и может быть использована в тяговых электроприводах автономных пневмоколесных транспортных средств. Способ управления тяговыми усилиями колес многоколесного полноприводного транспортного средства заключается в задании уставок параметров регулирования тяговых электродвигателей, измерении их частот вращения, обработке результатов измерений с учетом кривизны траектории движения и коррекции заданных уставок сигналами, пропорциональными разностям между частотами вращения электродвигателей и их рассчитанными предельно-допустимыми частотами вращения. Устройство содержит тяговые электродвигатели, преобразователи напряжения, источник питания, датчики частот вращения электродвигателей, блоки задания уставок первого и второго параметров регулирования, блоки коррекции уставок первого параметра регулирования, блок задания направления движения, блок приведения частот вращения электродвигателей к одному электродвигателю, блок выделения минимальной из приведенных частот вращения электродвигателей, блок расчета корректирующих сигналов, блок расчета предельных значений коэффициентов регулирования напряжений преобразователей. Технический результат заключается в повышении КПД электропривода. 2 н. и 4 з.п. ф-лы, 4 ил.
1. Способ управления тяговым электроприводом многоколесного транспортного средства, согласно которому в каждый момент времени задают величины регулируемых параметров тяговых электродвигателей и по определенному алгоритму формируют напряжения электродвигателей, измеряют частоту вращения ni каждого электродвигателя, где i - порядковый номер электродвигателя, определяют величину и знак угла α, задающего угловое направление движения транспортного средства относительно его продольной оси, вычисляют частоту вращения каждого электродвигателя, приведенную к месту установки какого-либо одного j-го электродвигателя по формуле nпрi=kпрi·ni, где kпрi - коэффициент приведения для i-го колеса, далее из вычисленных приведенных частот вращения определяют минимальную nпрmin, вычисляют предельно-допустимое максимальное значение приведенной частоты вращения электродвигателя по формуле nпрlim=(1,07÷1,20)·nпрmin, a также разности частот Δnпрi по формуле Δnпрi=nпрi-nnplim, уменьшают величину ранее заданного регулируемого параметра каждого электродвигателя, у которого Δnпрi>0, на величину, пропорциональную отношению Δnпрi/kпрi, и с учетом этого формируют напряжения питания каждого электродвигателя, причем kпpi=(µj/µi)·(RKi/RKj)·(RПj)/(RПi), где µj, µi - передаточные числа редукторов, установленных между выходными валами соответствующих электродвигателей и осями приводимых ими колес; RKi, RKj - паспортные значения радиусов качения соответствующих колес; RПi, RПj - рассчитанные по известным кинематическим соотношениям радиусы траекторий поворота соответствующих колес в функции сигнала α и конструктивных параметров транспортного средства.
2. Способ управления по п.1, отличающийся тем, что в качестве параметров регулирования используют крутящие моменты на валах тяговых электродвигателей транспортного средства, при этом распределение крутящих моментов между разными электродвигателями задают произвольно, например, пропорционально распределению вертикальных нагрузок между колесами транспортного средства, причем ранее заданные величины моментов электродвигателей, у которых Δnпрi>0, уменьшают, вычитая из них сигналы, пропорциональные отношениям Δnпрi/kпрi.
3. Способ управления по п.1 или 2, отличающийся тем, что величины крутящих моментов электродвигателей задают сочетанием отношений (Ei/fi) ЭДС Ei обмоток электродвигателей к частотам fi этих ЭДС и частот fsyi абсолютного скольжения, а при Δnпрi>0, ранее заданные величины fsyi уменьшают, вычитая из них сигналы, пропорциональные отношениям Δnпрi/kпрi.
4. Способ управления по п.1 или 2, отличающийся тем, что крутящие моменты на валах электродвигателей задают сочетанием определенных значений моментообразующих Iq и намагничивающих Id составляющих статорных токов электродвигателей, а при Δnпрi>0 ранее заданные моментообразующие составляющие токов соответствующих электродвигателей уменьшают, вычитая из них сигналы, пропорциональные отношениям Δnпрi/kпрi.
5. Способ управления по п.1 или 2, отличающийся тем, что для тягового электропривода с тяговыми электродвигателями, подключенными к общему источнику питания постоянного тока с выходным напряжением Uп посредством соответствующих преобразователей, при котором напряжение Ui каждого электродвигателя формируют в соответствии с формулой Ui=kcx·kpi·Uп, где kсх - коэффициент, определяемый схемой соединения преобразователя, kpi - коэффициент регулирования напряжения i-го преобразователя, равный отношению величины напряжения Ui к максимально возможной величине этого напряжения при kpi=1, выделяют максимальную nmax из замеренных частот вращения, вычисляют отношения ni/nmax измеренных частот вращения к максимальной из них, при этом величину коэффициента регулирования напряжения каждого преобразователя ограничивают в соответствии с формулой:
kрi≤ni/nmax.
6. Устройство для осуществления способа по пп.1-5, содержащее тяговый электропривод, включающий в себя не менее двух тяговых электродвигателей, каждый из которых подключен посредством соответствующего преобразователя напряжения, имеющего вход частоты вращения электродвигателя, вход ограничения напряжения преобразователя и два входа задания, соответственно, первого и второго параметров регулирования, к общему источнику питания, датчики частот вращения тяговых электродвигателей, блоки задания уставок, соответственно, первого и второго параметров регулирования, блоки коррекции уставок первого параметра регулирования, каждый из которых имеет задающий и корректирующий входы, блок задания направления движения, блок приведения частот вращения электродвигателей к одному электродвигателю, блок выделения минимальной из приведенных частот вращения электродвигателей, блок расчета корректирующих сигналов, блок расчета предельных значений коэффициентов регулирования напряжений преобразователей, при этом выход каждого датчика частоты вращения соединен со входом частоты вращения электродвигателя соответствующего преобразователя, а также с соответствующими входами блока приведения и блока расчета предельных значений коэффициентов регулирования напряжений преобразователей, каждый выход блока приведения соединен с соответствующими входами блока выделения минимального сигнала и блока расчета корректирующих сигналов, каждый выход которого соединен с корректирующим входом соответствующего блока коррекции уставки первого параметра регулирования, задающий вход которого соединен с соответствующим выходом блока задания уставки первого параметра регулирования, выход каждого блока коррекции соединен с первым задающим входом соответствующего преобразователя напряжения, причем выход блока задания направления движения соединен с дополнительным входом блока приведения, выход блока выделения минимального сигнала соединен с дополнительным входом блока расчета корректирующих сигналов, каждый выход блока расчета предельных значений коэффициентов регулирования напряжений преобразователей соединен с входом ограничения напряжения соответствующего преобразователя напряжения, а выход блока задания второго параметра регулирования соединен со вторыми задающими входами преобразователей напряжения.
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| RU 2060173 С1, 20.05.1996 | |||
| US 6580874 В1, 17.06.2003. | |||

