Изобретение относится к строительству и ремонту железнодорожного пути, в частности к уплотнению балласта шпалоподбивочной машиной.
Известен способ подбивки шпал железнодорожного пути (Е01В 27/12; 27/16 №2249644, RU), содержащий операции непрерывного продвижения машины по рельсам, установки рамы с подбивочными блоками над шпалой, погружения бойков в балласт, подбивку шпалы, подъем и перемещение к следующей шпале. При этом перемещение подбивочных блоков к следующей шпале производится одновременно.
Недостатками данного способа являются низкая производительность, обусловленная прекращением операции подбивки шпалы на время перемещения подбивочного блока к следующей шпале, и снижение эффективности при неравномерности эпюры пути. Подбивка каждой шпалы производится в различных условиях по отношению к путеподъемному агрегату, что ведет к снижению качества пути.
Наиболее близким является способ подбивки шпал железнодорожного пути, изложенный в описании работы выправочно-подбивочной машины (Е01В 27/17 №2237122, RU), содержащий операции перемещения машины с постоянной скоростью, перемещения каретки с подбивочными блоками в позицию над шпалами, заглубления подбоек в балласт, подбивки, подъем подбивочных блоков и их перемещение к следующим шпалам с возможностью смещения в поперечном относительно оси машины направлении.
При работе в радиальных кривых смещение прямых направляющих постоянно по величине. В связи с тем, что конструкция направляющих для продольного перемещения кареток предполагает их расположение параллельно оси машины, то при их несимметричном расположении относительно осей поворота ходовых тележек траектория движения подбивочного блока пересекает рельс. Из этого следует, что подбивочные блоки занимают оптимальное (симметричное) положение относительно рельс только в одной точке: близкой к среднему положению хода подбивочного блока.
Недостатком данного способа является низкая производительность, обусловленная прекращением подбивки шпал на время перемещения подбивочных блоков к следующей шпале, и низкая степень создания оптимальных условий расположения подбивочного инструмента.
Известна путевая машина для подбивки шпал железнодорожного пути (Е01В 27/12, 27/16 №2249644, RU), содержащая раму машины с ходовыми механизмами на концах, раму для подбивочных агрегатов, которая на одном конце соединена с рамой машины шарниром с возможностью продольного перемещения и вторым концом опирается на путь при помощи ходового механизма. Каждый подбивочный агрегат расположен над своим рельсом и одновременно подбивает четыре шпалы. Каждая пара бойков расположена на различном, но постоянном расстоянии от путеподъемного агрегата.
Недостатком данной машины являются низкая производительность, обусловленная прекращением подбивки шпал на время перемещения рамы с подбивочными агрегатами к следующим шпалам, а также снижение эффективности при неравномерной эпюре пути, обусловленное постоянным расположением пар бойков в продольном направлении. Пары бойков каждой шпалы находятся на различных расстояниях по отношению к путеподъемному агрегату, т.е. находятся в различных условиях, что ведет к снижению качества выправки пути.
Известна шпалоподбивочная машина (E01b 27/02 №390728), содержащая два подбивочных устройства, перемещающихся по горизонтальным прямолинейным направляющим машины на ползунах с возможностью изменения расстояния между ними. Подбивка шпал производится одновременно, а их перемещение для подбивки другой группы шпал производится при поднятых подбивочных устройствах.
Недостатком данной машины являются низкая производительность, обусловленная прекращением подбивки шпал на время перемещения подбивочных устройств к следующим шпалам.
Наиболее близкой является выправочно-подбивочная машина (Е01В 27/17, №2237122, RU), содержащая раму, установленную на ходовых тележках и перемещающуюся по рельсовому пути с постоянной скоростью, установленные на раме поперечные направляющие и привод для плоско-параллельного перемещения по ним продольных направляющих, соединенных балкой, каретку, снабженную приводом для передвижения по продольным направляющим, с вертикальными направляющими и приводом для перемещения по ним подбивочного блока. Причем инструменты для подбивки двух соседних шпал размещены на одной станине и расстояние между ними в продольном направлении пути постоянно, а в случае наличия выправочного устройства подбивка соседних шпал производится на различных расстояниях от него. В поперечном направлении относительно пути расстояние между подбивочными блоками также постоянно, что отрицательно сказывается при работе в кривых, где расстояние между рельсами увеличено в сравнении с прямым путем, а расстояние между шпалами внутреннего и наружного рельса различно.
Недостатками данной машины являются низкая производительность, обусловленная прекращением подбивки шпал на время перемещения подбивочных устройств к следующим шпалам, а также снижение эффективности выполнения работ при изменении шага расположения шпал, неравномерности эпюры пути и в кривых ввиду постоянного расположения подбивочных инструментов между собой как в продольном, так и в поперечном направлениях и невозможность осуществления подбивки шпал в одинаковых условиях по отношению к выправочному устройству (в случае наличия такового).
Предлагаемое изобретение позволяет увеличить производительность и создать одинаковые условия для подбивки каждой шпалы.
Для повышения производительности подбивку производят несколькими подбивочными блоками над каждым рельсом, во время подбивки шпалы одним подбивочным блоком второй перемещают в исходное положение для подбивки следующей шпалы, при этом скорость перемещения машины прямо пропорциональна произведению среднего расстояния между соседними шпалами на количество одновременно подбиваемых шпал и обратно пропорциональна времени контакта одного подбивочного блока с балластом.
При этом скорость перемещения подбивочного блока в исходное положение относительно машины может быть равна скорости перемещения относительно машины во время его контакта с балластом.
Для уменьшения общего количества подбивочных блоков и/или для расширения технологических возможностей скорость перемещения подбивочного блока в исходное положение относительно машины может отличаться от скорости перемещения относительно машины во время его контакта с балластом.
Для уменьшения максимального смещения подбивочных блоков от оси обрабатываемого рельса в поперечном направлении при работе в переходных кривых подбивку производят с непрерывным перемещением направляющих относительно машины в поперечном направлении, причем при движении с прямого пути на радиусный или с большего радиуса на меньший поперечное перемещение направлено в наружную сторону радиуса, а при движении с радиусного на прямой путь или с меньшего радиуса на больший - во внутреннюю.
При работе в радиусных кривых для минимизации поперечных смещений инструмента относительно рельса подбивку производят с начальным смещением подбивочного блока в наружную сторону кривизны пути.
При этом направляющие для продольного перемещения подбивочных блоков, на участке контакта последних с балластом, устанавливают параллельно хорде, а величина смещения исходного положения подбивочного блока равна половине стрелы прогиба рельса на указанном участке.
Для обеспечения возможности работы в кривых малого радиуса одновременно подбивку производят меньшим количеством подбивочных блоков, чем это возможно на прямом пути.
Для обеспечения возможности работы с неравномерной эпюрой пути продольное исходное положение подбивочных блоков определяют с учетом отклонения Δ фактического положения шпал от номинального расположения и до начала контакта подбоек с балластом производят коррекцию исходного положения подбивочных блоков, т.е. их смещение на величину К в сторону указанного отклонения.
При этом продольное положение подбивочных блоков над обоими рельсами можно определять с учетом расположения шпал под одним рельсом.
Для обеспечения возможности работы при разности номинального шага шпал пути и конструктивного шага расположения подбивочных блоков (шаг кареток при их равномерном расположении на кольцевых продольных направляющих) во время подбивки блоки дополнительно перемещают в сторону, противоположную указанной разности.
При этом перед подбивкой можно производить дополнительную коррекцию исходного положения подбивочных блоков, при этом величина дополнительной коррекции находится в пределах 0<K1≤Δl1 и направлена в сторону, противоположную направлению дополнительного перемещения, где Δl1 - величина дополнительного перемещения.
Для обеспечения возможности работы в радиусной кривой для компенсации разности шагов шпал внутреннего и наружного рельса производят круговую коррекцию и дополнительное перемещение подбивочных блоков вдоль произвольной продольной оси железнодорожного пути, относительно которой производится отсчет перемещения машины, в том числе относительно оси одного из рельс, при этом величина Δl2=(Lнар-Lвнутр)*а/в; K2=Δl2/2;
где Δl2 - величина дополнительного перемещения;
К2 - величина круговой коррекции;
Lнар, Lвнутр - длины хорд зон контакта подбивочных блоков с балластом соответственно наружного и внутреннего рельса;
а - расстояние от указанной оси до оси рассматриваемого рельса;
в - расстояние между осями рельс;
при этом направление круговой коррекции подбивочных блоков над внешним рельсом совпадает с направлением перемещения машины, а над внутренним - противоположно, а направление дополнительного перемещения противоположно направлению круговой коррекции.
Для осуществления предлагаемого способа и повышения производительности на машине продольные направляющие выполнены кольцевыми, имеющими прямолинейный участок, каретки на них располагаются не менее двух над каждым рельсом.
Машина может быть снабжена датчиком определения положения шпалы под рельсом.
Машина может быть снабжена устройством для нанесения метки на путь и устройством считывания метки с пути.
Машина может быть снабжена минимум одним устройством для определения поперечного положения прямолинейного участка кольцевой направляющей относительно рельса.
Машина может быть снабжена двумя устройствами для определения поперечного положения прямолинейного участка кольцевой направляющей относительно рельса и минимум одно из них может быть выполнено с возможностью продольного перемещения от привода.
Машина может быть снабжена устройством управления, содержащим передатчик беспроводного управляющего сигнала, а рабочий орган содержит приемник указанного сигнала, связанный с приводом исполнительного механизма.
Кольцевые направляющие могут быть установлены на отдельных подвижных рамах.
Подвижная рама может быть выполнена с возможностью вертикального перемещения от привода относительно рамы машины.
Каждая каретка может быть снабжена индивидуальным регулируемым приводом перемещения по кольцевым направляющим.
Привод перемещения кареток по кольцевым направляющим может быть снабжен минимум одним гибким тяговым элементом, соединенным с каретками одной направляющей.
Привод перемещения кареток по кольцевым направляющим может быть выполнен регулируемым в зависимости от скорости передвижения машины.
Привод перемещения кареток по кольцевым направляющим может быть кинематически связан с приводом передвижения машины.
Каждая каретка может быть снабжена дополнительным приводом ее перемещения по кольцевым направляющим.
Сущность изобретения поясняется чертежами, где:
на фиг.1 изображен общий вид машины, реализующей заявляемый способ;
на фиг.2 - сечение А-А на фиг.1, кольцевые направляющие на одной общей раме;
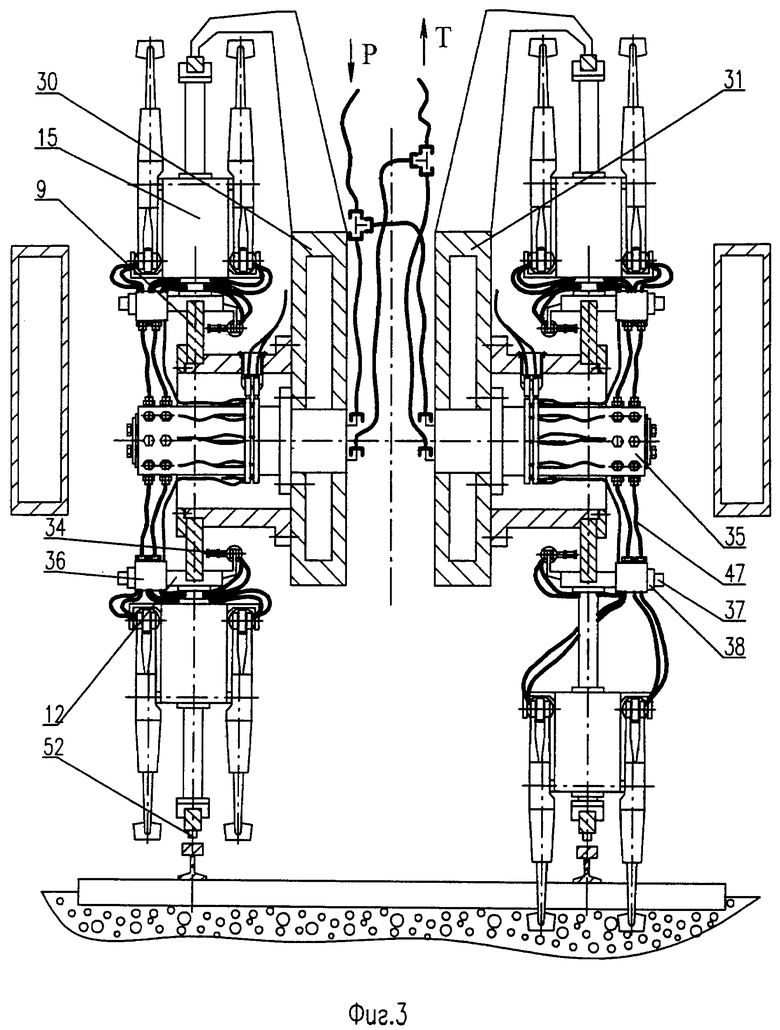
на фиг.3 - сечение А-А на фиг.1, кольцевые направляющие на отдельных рамах;
на фиг.4 - горизонтальное расположение кольцевых направляющих;
на фиг.5 - вид Д на фиг.2, подбивочный комплекс и коррекция положения подбивочного блока;
па фиг.6 - вид Б на фиг.1, подбивочный комплекс (каретки не показаны);
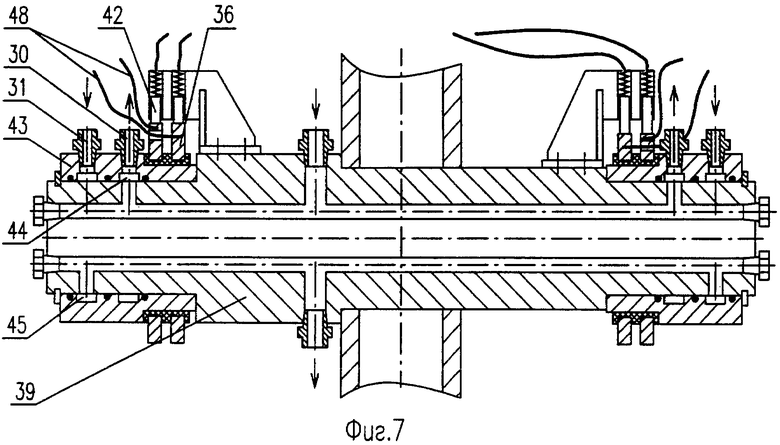
на фиг.7 - сечение В-В на фиг.2, подвод коммуникаций с рамы машины на
каретки;
на фиг.8 - дополнительный привод каретки;
на фиг.9 - сечение Г-Г на фиг.6, привод гибкого тягового органа;
на фиг.10 - привод тяговых органов кольцевых направляющих отдельных рам;
на фиг.11 - индивидуальный привод каретки;
на фиг.12 - одновременная подбивка 2х шпал;
на фиг.13 - подбивка уменьшенным количеством подбивочных блоков (1 шпалы);
на фиг.14 - зоны контакта подбоек с балластом на прямом пути;
на фиг.15 - зоны контакта подбоек с балластом на радиусном участке пути;
на фиг.16 - положение направляющей со смещением;
на фиг.17 - положение направляющей при подбивке уменьшенным количеством подбивочных блоков;
на фиг.18 - круговая коррекция положения и дополнительное перемещение подбивочного блока в радиусной кривой пути;
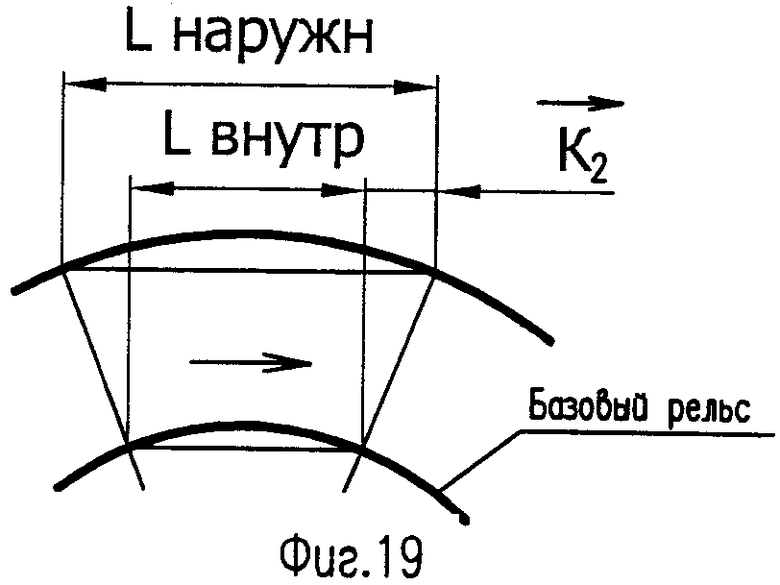
на фиг.19 - то же при внутреннем базовом рельсе;
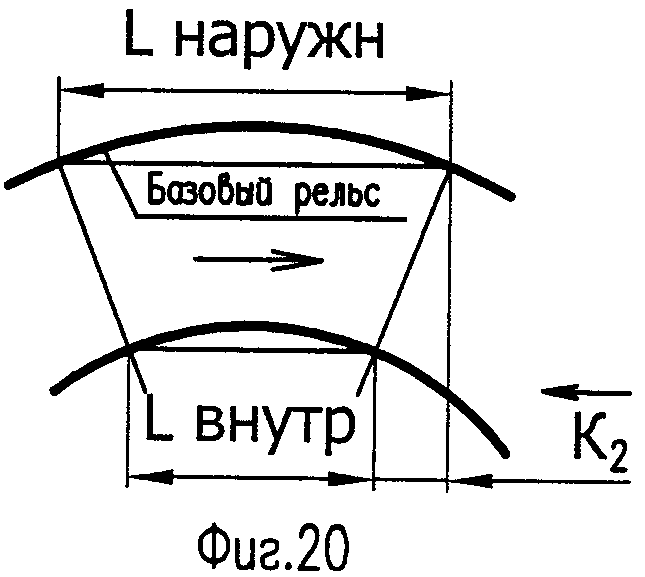
на фиг.20 - то же при внешнем базовом рельсе;
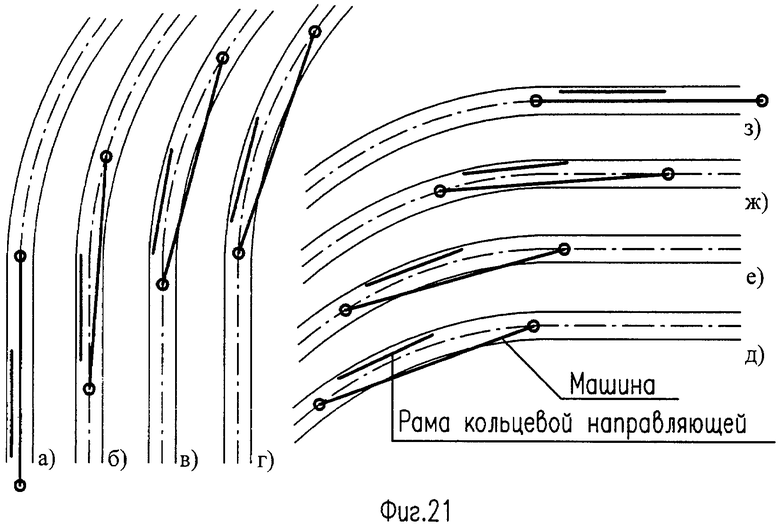
на фиг.21 - фазы перехода машины с прямого пути на радиусный и обратно;
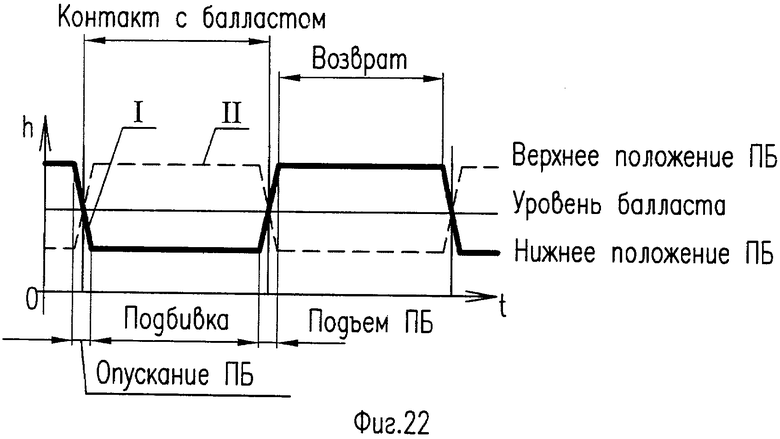
на фиг.22 - циклограмма работы машины.
Машина (см. Фиг.1) для осуществления способа непрерывной подбивки шпал железнодорожного пути содержит раму 1, установленную на ходовых приводных тележках 2 и 3 для перемещения по рельсам. На раме (см. Фиг.6) выполнены поперечные направляющие 4, на которых установлена подвижная в горизонтальной плоскости рама 5 с приводами 6 и 7 с возможностью независимого перемещения по ним. На подвижной раме параллельно над каждым рельсом 8 (см. Фиг.5) выполнены продольные кольцевые (замкнутые) направляющие 9 с прямолинейным (рабочим) участком 10 и участком 11 возврата, включающим два радиусных участка и прямую верхнюю ветвь. Участок возврата может иметь другие геометрические формы: например часть эллипса. На каждой из кольцевых направляющих установлены каретки 12. Длина прямолинейного участка 10 должна быть не менее одного шага продольного расположения шпал и прямо пропорциональна количеству одновременно подбиваемых шпал плюс размер направляющих каретки в продольном направлении. Количество одновременно подбиваемых шпал может быть выражено дробным числом. Кольцевые направляющие изначально расположены в параллельной продольной оси машины плоскости, например, в вертикальной. Каретки снабжены (см. Фиг.8) вертикальными направляющими 13 и приводом 14 для перемещения по ним подбивочного блока 15. На подбивочном блоке закреплены подбойки 16 с приводом 17 для перемещения балласта под шпалу 18 и его уплотнения (подбивки). На каретке может располагаться соединенная с аппаратами управления распределительная, регулирующая и приемо-передающая аппаратура 36, 37 и 38, а приводы рабочих органов могут быть снабжены датчиками положения.
Каретки могут иметь индивидуальный привод 19 (см. Фиг.11) для передвижения по кольцевым направляющим 9. Выходным звеном привода может являться, например, шестерня 20, которая зацеплена с зубчатой рейкой 21, установленной параллельно кольцевым направляющим. Привод может быть многоскоростным или регулируемым. В этом случае количество кареток на каждой кольцевой направляющей должно быть не менее двух.
Привод для перемещения кареток по кольцевым направляющим может быть общим для кареток одной направляющей. Привод (см. Фиг.9) может быть выполнен в виде двигателя 22, кинематически связанного с гибким замкнутым тяговым органом 23, например цепью, расположенным параллельно кольцевой направляющей 9. Каждая из кареток соединена непосредственно с тяговым органом. Двигатель может быть кинематически связан одновременно с гибкими тяговыми органами обеих замкнутых направляющих (см. Фиг.10). В этом случае на каждой из кольцевых направляющих должны быть установлены минимум три равномерно расположенные каретки. Шаг расположения кареток равен шагу продольного расположения шпал.
Подвижная рама 5 (см. Фиг.5) может иметь вертикальные направляющие 24, 25 и приводы 26, 27 независимого перемещения по ним переднего, по ходу движения машины, и заднего концов подвижной рамы. Вертикальные направляющие выполнены на промежуточных салазках 28, 29, перемещающихся по поперечным направляющим 4 рамы 1.
Подвижная рама (см. Фиг.2) может быть выполнена в виде двух независимых подвижных рам 30 и 31 (см. Фиг.4). При этом на каждой раме будут кольцевые направляющие для кареток с подбивочными блоками для подбивки балласта только под одним рельсом.
Прямолинейный участок кольцевой направляющей каждой подвижной рамы с помощью приводов 6 и 7, а также приводов 26 и 27 может быть установлен в требуемое положение, в том числе, отличное от параллельного продольной оси машины.
При наличии двух подвижных относительно друг друга рам общий привод тягового органа должен содержать элементы 32 и 33 кинематической цепи, позволяющие их взаимное перемещение, как в горизонтальной, так и в вертикальной плоскости, например, шлицевое соединение валов и/или шарнир Гука.
При наличии двух подвижных относительно друг друга рам каждая из них может иметь отдельный привод перемещения кареток.
Общий привод для перемещения кареток по направляющим (для одной или каждой из подвижных рам) может быть кинематически связан с приводом (условно не показан) ходовой тележки. Он также может включать в себя устройство плавного изменения передаточной функции, например вариатор, для компенсации изменения диаметра колес ходовых тележек в результате износа или изменения соотношения скоростей движения машины и тягового органа.
Для перемещения каретки по кольцевым направляющим каждая из них может содержать дополнительный привод. В случае с индивидуальным приводом 19 дополнительный может быть выполнен в виде второго двигателя, подключенного к первому двигателю через дифференциальную передачу, на выходе которой установлена шестерня 20. Дополнительный привод 34 в случае с общим гибким тяговым органом может быть выполнен, например, в виде гидроцилиндра, корпус которого соединен с кареткой, а шток соединен с тяговым органом. Скорость перемещения гибкого тягового органа относительно машины прямо пропорциональна конструктивному шагу расположения кареток с подбивочными блоками и количеству подбиваемых шпал в единицу времени. Скорость перемещения машины относительно рельс прямо пропорциональна произведению среднего расстояния между соседними шпалами на количество одновременно подбиваемых шпал и обратно пропорциональна времени контакта одного подбивочного блока с балластом.
В средней части подвижной рамы расположено устройство 35 (см. Фиг.3 и Фиг.7) подвода силового гидро-, электропитания и управляющих сигналов к приводам механизмов, например: привод подъема подбивочного блока, привод подбоек, привод дополнительного перемещения каретки и подвод электропитания, управляющих сигналов к распределительным и регулирующим аппаратам. Устройство подвода служит для передачи энергии и/или сигналов с неподвижной части на поворотную часть и может быть выполнено, например, в виде корпуса 39 с выполненными внутри каналами 40 и 41 для подачи рабочей жидкости и токоподводящими элементами 42 (щетками). На корпусе установлена поворотная муфта 43 с кольцевыми канавками 44 и 45 внутри, выполненными напротив каналов корпуса, и токосъемными кольцами 46 (по числу линий связи), контактирующими с токоподводящими элементами. Канавки поворотной муфты соединены гибкими трубопроводами 47 с распределительно-регулирующими аппаратами 36 управления приводами кареток и подбивочных блоков. Распределительно-регулирующие аппараты управления установлены на каждой каретке. Токосъемные кольца также соединены проводниками 48 с аппаратами 36, 37, 38 управления.
Машина может быть снабжена одним или двумя датчиками 49 (см. Фиг.5), например индуктивными, для определения положения шпалы вдоль пути, расположенными каждый над своим рельсом.
Машина может быть снабжена устройством 50 для нанесения метки на рельс, например краскопультом со светоотражающей краской, и устройством 51 считывания положения метки с рельса, например источника света и светочувствительного элемента.
Подвижная рама или каждая подвижная рама может быть снабжена датчиком 52 (см. Фиг.12 и Фиг.13), выполненным, например, в виде индуктивного бесконтактного датчика, для определения положения рельса в поперечном направлении относительно прямолинейного участка кольцевой направляющей, связанным с приводом поперечного передвижения рамы. Для минимизации максимального отклонения подбоек подбивочных блоков от оси рельса на подвижной раме могут быть установлены два датчика, связанных каждый с соответствующим приводом 6 или 7. Датчики могут быть расположены вдоль пути на некотором расстоянии «С» первый от начала, второй от конца зоны контакта подбоек с балластом. Оптимальным является расположение датчиков от концов зоны контакта подбоек с балластом на расстоянии C=0,146L, где L - длина указанной зоны.
Минимум один из них (см. Фиг.13) может быть установлен на подвижной раме с возможностью передвижения вдоль кольцевых направляющих и снабжен приводом 53.
Машина может быть снабжена устройством 54 управления взаимодействием перемещения машины и рабочих органов, расположенным на раме машины и содержащим передатчик (условно не показан) управляющего сигнала, а рабочий орган, например каретка и/или подбивочный блок, содержит приемник указанного сигнала, связанный с приводом исполнительного механизма рабочего органа. В качестве управляющего сигнала может быть использован радио-, световой и т.п. поток волновой или лучистой энергии. Устройство 54 управления может быть выполнено на базе элементов электронной и вычислительной техники, например: микросхем, контроллеров и/или компьютера. Машина снабжена датчиком 55 пройденного пути, выполненным, например, в виде колеса, контактирующего с рельсом, и импульсного датчика, определяющего величину и скорость вращения колеса. Указанное колесо может быть совмещено с опорным колесом одной из тележек контрольно-измерительной системы выправки пути или ходовых тележек машины. Машина может быть снабжена двумя датчиками пройденного пути, по одному для каждого рельса.
В зависимости от распределения функций элементов устройства управления (обработка сигналов датчиков обратной связи приводов) рабочий орган и/или каретка дополнительно может иметь передатчик, а устройство управления - приемник сигнала соответствующих датчиков.
Способ непрерывной подбивки шпал железнодорожного пути содержит операции непрерывного перемещения машины, остановки подбивочного блока над подбиваемой шпалой, его опускания, подбивки балласта, подъема подбивочного блока в верхнее положение и его перемещения к следующей шпале, при этом во время подбивки шпалы одним подбивочным блоком I другой блок II перемещают в исходное положение для подбивки следующей шпалы (см. Фиг.22), а скорость перемещения машины прямо пропорциональна произведению среднего расстояния между соседними шпалами на количество одновременно подбиваемых шпал и обратно пропорциональна времени контакта одного подбивочного блока с балластом.
Скорость перемещения подбивочного блока по кольцевым направляющим в исходное положение на участке возврата относительно машины может быть равна скорости перемещения подбивочного блока относительно машины во время контакта последнего с балластом. Подбивку, в этом случае, производят минимум тремя подбивочными блоками над каждым рельсом.
Скорость перемещения подбивочного блока по кольцевым направляющим в исходное положение относительно машины может отличаться от скорости перемещения подбивочного блока относительно машины во время его контакта с балластом. Подбивку, в этом случае, производят минимум двумя подбивочными блоками над каждым рельсом.
В переходных кривых подбивку производят с непрерывным перемещением направляющих относительно машины в поперечном направлении (см. Фиг.21), причем при движении с прямого пути на радиусный или с большего радиуса на меньший поперечное перемещение направлено в наружную сторону радиуса (фазы «а», «б» и «в»), а при движении с радиусного на прямой путь или с меньшего радиуса на больший - во внутреннюю (фазы «е», «ж» и «з»). При движении машины по пути постоянного радиуса (фазы «г» и «д») перемещение направляющих относительно машины не производят.
В радиусных кривых подбивку производят с начальным смещением подбивочного блока в наружную сторону кривизны пути (см. Фиг.16).
В радиусных кривых направляющие 59 для продольного перемещения подбивочных блоков, на участке L контакта последних с балластом, устанавливают параллельно хорде 60, указанного участка кривой, а величина начального смещения h1 положения подбивочного блока равна половине стрелы прогиба h рельса на этом участке.
В радиусных кривых в контакте с балластом одновременно может находится меньшее количество подбивочных блоков, чем это возможно на прямом пути (см. Фиг.13 и Фиг.17). При этом на участке L1 со стрелой прогиба h2 рельса смещение устанавливают h3, а направляющие - параллельно хорде 61.
Продольное положение подбивочных блоков над обоими рельсами определяют с учетом расположения шпал под одним рельсом или продольное положение подбивочных блоков над каждым рельсом определяют с учетом расположения шпал под соответствующим рельсом.
Продольное положение подбивочных блоков определяют с учетом отклонения фактического положения шпал от номинального (теоретического) расположения и до начала контакта подбоек с балластом производят коррекцию исходного положения подбивочных блоков (см. Фиг.5), т.е. подбивочный блок дополнительно перемещают в сторону указанного отклонения на величину K=Δt=tф-tн;
где Δt - разность фактического и номинального расположения шпалы;
tф и tн - соответственно фактическое и номинальное положение шпалы в продольном направлении пути.
При разности номинального шага шпал пути и конструктивного шага расположения подбивочных блоков перед подбивкой производят дополнительную коррекцию исходного положения подбивочных блоков, величина которой находится в пределах 0<K1≤Δl1, а во время подбивки блоки дополнительно перемещают в сторону, противоположную указанной коррекции, при этом: Δt1=tшп-tбл; -Δl1=Δt1*n;
где Δt1 - разность шагов шпал и конструктивного расположения подбивочных блоков;
tшп и tбл - шаг расположения соответственно шпал и подбивочных блоков;
Δl1 - величина дополнительного перемещения;
n - количество одновременно подбиваемых шпал.
Для компенсации разности шагов шпал внутреннего и наружного рельсов 56 и 57 в радиусных кривых производят круговую коррекцию исходного положения подбивочных блоков и дополнительное перемещение подбивочных блоков относительно произвольной продольной оси 58 железнодорожного пути, относительно которой производится отсчет перемещения машины (см. Фиг.18), при этом величина дополнительного перемещения Δl2=(Lнаружн-Lвнутр)*а/в;
где Lнаружн, Lвнутр - длины хорд зон контакта подбивочных блоков с балластом соответственно наружного и внутреннего рельса;
а - расстояние от указанной оси до оси рельса;
в - расстояние между осями рельс;
а величина круговой коррекции K2=Δl2/2, при этом направление круговой коррекции подбивочных блоков над наружным рельсом совпадает с направлением перемещения машины, а над внутренним - противоположно, а направление дополнительного перемещения противоположно направлению круговой коррекции.
Круговую коррекцию исходного положения подбивочных блоков и дополнительное перемещение подбивочных блоков можно производить относительно оси одного из рельс: внутреннего (см. Фиг.19) или наружного (см. Фиг.20).
Коррекцию, дополнительную коррекцию и дополнительное перемещение, круговую коррекцию и дополнительное перемещение подбивочного блока производят дополнительным приводом путем перемещения подбивочного блока относительно общего привода или то же самое производят индивидуальным приводом перемещения каретки относительно номинального расположения путем изменения скорости.
Осуществление непрерывного способа подбивки шпал производится машиной, изображенной на фиг.1. Перед началом работы на прямом пути подвижную раму 5 приводами 6 и 7 устанавливают в положение так, чтобы прямой (рабочий) участок 10 кольцевых направляющих 9 располагался над рельсом 8 и параллельно ему.
Путем кратковременного включения привода кареток (индивидуального, привода тягового органа или, в случае наличия кинематической связи приводов ходовых тележек машины и тягового органа, путем перемещения машины по рельсам с подключением кинематической цепи привода тягового органа) передние по ходу движения машины каретки 12 с подбивочными блоками 15 устанавливают в исходное положение, т.е. в начало прямолинейного участка 10. Остальные каретки располагают на расстоянии шага шпал от первой каретки. После установки кареток в исходное положение привод их перемещения выключают.
Машину на ходовых тележках 2 и 3 равномерно перемещают по рельсам. При этом скорость перемещения машины прямо пропорциональна произведению среднего расстояния между соседними шпалами на количество одновременно подбиваемых шпал и обратно пропорциональна времени контакта одного подбивочного блока с балластом.
Как только первая каретка окажется над шпалой 18, включают привод перемещения кареток по направляющим и привод 14 первой каретки на опускание подбивочного блока 15. Каретка движется по участку 10 кольцевых направляющих со скоростью, равной скорости перемещения машины по рельсам, но в противоположную сторону. Это обстоятельство позволяет блоку оставаться неподвижным относительно балласта. Пока каретка движется по рабочему участку продольных направляющих, включают привод 17 перемещения подбоек 16 к шпале и производят перемещение балласта под шпалу и его уплотнение. При перемещении кареток па величину, равную шагу расположения шпал, другая каретка оказывается в исходном положении над следующей шпалой и также начинает процесс подбивки. По мере приближения каретки к концу рабочего участка подбивка заканчивается и блок 15 приводом 14 поднимается вверх. После выхода подбоек 16 из балласта каждая из кареток перемещается по участку 11 направляющей 9. Находясь на расстоянии шага шпал от соседних кареток, она снова оказывается в исходном положении над шпалой и процесс повторяется. Подбивку производят несколькими подбивочными блоками над каждым рельсом. Во время подбивки шпалы одним подбивочным блоком другой перемещают в исходное положение для подбивки следующей шпалы. Таким образом обеспечивается непрерывность процесса подбивки шпал железнодорожного пути и высокая производительность.
При использовании одного двигателя 22 и тягового органа 23 для перемещения нескольких кареток (минимум трех), все они движутся одновременно, с одинаковой скоростью, на расстоянии друг от друга, равном шагу расположения шпал, вне зависимости от нахождения подбоек в балласте или при возврате подбивочного блока в исходное положение. Как только каретка с участка возврата опустится в исходное положение, включают вначале привод опускания блока, а затем привод перемещения подбоек к шпале. За время подбивки шпалы происходит перемещение машины на расстояние, прямо пропорциональное шагу расположения и количеству одновременно подбиваемых шпал. Ввиду равенства шагов расположения шпал и кареток, а также скоростей перемещения кареток по направляющим и перемещения машины по рельсам каждый подбивочный блок, двигаясь по рабочему участку направляющих, остается постоянно напротив шпалы.
По окончании подбивки балласта под шпалу включают приводы отвода подбоек от шпалы и подъема подбивочного блока. К моменту выхода подбоек одного подбивочного блока из балласта подбойки другого блока входят в балласт. При одновременной обработке нескольких шпал подбойки остальных блоков, находящихся на участке 10, находятся в балласте в различных стадиях процесса подбивки. После выхода подбоек из балласта каретка с подбивочным блоком, перемещаясь по участку 11 кольцевых направляющих 9, снова оказывается в исходном положении и цикл повторяется.
Ввиду того, что длина прямолинейного участка 10 меньше суммарной длины двух радиусных участков и верхней ветви кольцевых направляющих (участок 11 возврата), каретку, находящуюся на участке возврата, можно перемещать в исходное положение со скоростью, превышающей ее скорость во время подбивки шпалы подбивочным блоком. Изменение скорости может быть достигнуто как изменением скорости индивидуального привода 19 кареток, так и сложением или вычитанием скоростей привода 22 тягового органа и дополнительного привода 34. Это позволяет уменьшить общее число подбивочных блоков на одной направляющей до двух. В минимальном варианте, когда первая каретка переместится в конец прямолинейного участка продольных направляющих, в данном случае на расстояние шага, вторая каретка за счет ускоренного перемещения по участку возврата окажется на прямолинейном нижнем участке в исходном положении на расстоянии шага от первой. В это время включаются приводы 14 вертикального перемещения блоков 15 по направляющим. Блок первой каретки поднимается вверх, а блок второй каретки опускается вниз. Затем все повторяется вновь.
Если подбивочных блоков более двух, часть кареток располагается на рабочем участке направляющих на расстоянии между собой, равном шагу продольного расположения шпал, оставшихся на участке возврата. При этом длины рабочего участка продольных направляющих, при выбранной скорости движения машины, достаточно для обеспечения времени, необходимого для заглубления подбоек в балласт, перемещения балласта под шпалу и выемки подбоек из балласта, а расположение кареток на участке возврата по шагу отличается от шага продольного расположения шпал.
Управление машиной и рабочими органами может производиться с помощью устройств 49, 50, 51, 52 и 55, определяющих положение шпалы под рельсом, отмечающих и определяющих начало и окончание обрабатываемого участка пути, определяющих положение направляющих 9 над рельсом в направлении поперек пути и регулируемых приводов механизмов. Эти устройства совместно с устройством 54 управления с использованием силовых, токопроводящих линий и радиоканалов или другой беспроводной связи обеспечивают контроль положения и скорости всех рабочих механизмов.
При движении машины в режиме измерительной поездки включают устройство 50 для нанесения метки на рельс и начинается запись в устройство 54 управления продольного положения каждой шпалы под одним или под каждым рельсом. После записи участка пути, подлежащего обработке, подают сигнал на окончание записи пути. Вновь срабатывает устройство 50 для нанесения метки на рельс. Машина проезжает дальше, пока метка не совпадет с окончанием рабочего участка кольцевых направляющих (зоны контакта подбоек с балластом). Это расстояние определяется взаимным расположением на машине кольцевых направляющих и устройства 50 для нанесения метки на рельс. Далее устройство 54 управления выполняет формирование управляющей программы с расчетом всех видов коррекций исходных положений и дополнительных перемещений подбивочных блоков, а машину возвращают в начало обрабатываемого участка пути.
При достаточной вычислительной мощности устройства управления расчет и формирование управляющей программы можно производить непосредственно при производстве подбивки шпал обрабатываемого участка пути.
Кольцевые направляющие с помощью приводов 6 и 7, а также 26 и 27 перемещают поперек пути и устанавливают над рельсом и параллельно ему. Причем, в зависимости от кривизны пути, устройство управления рассчитывает и устанавливает положение приводов таким образом, что кольцевые направляющие устанавливаются параллельно хорде зоны контакта подбоек с балластом. Расположение датчика 52 на некотором расстоянии от начала зоны контакта подбоек с балластом обеспечивает в кривых уменьшение максимального смещения подбоек в наружную и внутреннюю сторону от рельса за время подбивки шпалы.
Если конструкция машины содержит два датчика 52, установленных на расстоянии С или C1 от концов зоны контакта подбоек с балластом, то каждый привод 6 и 7 перемещает направляющие до расположения соответствующего датчика над осью рельса. В этом случае необходимость расчета взаимного положения приводов устройством управления отпадает, а результат остается прежним.
Первые по ходу движения каретки с подбивочными блоками устанавливают в исходное положение.
Машину на ходовых тележках 2 и 3 равномерно перемещают по рельсам в направлении подбивки пути со скоростью, прямо пропорциональной произведению расстояния между соседними шпалами на количество одновременно подбиваемых шпал и обратно пропорциональной времени контакта одного подбивочного блока с балластом. Направление подбивки указано стрелкой на Фиг.1.
Как только будет подан сигнал о начале участка подбивки шпал или считывающее устройство 51 определит наличие метки, устройство управления включает отсчет пройденного пути и запись сигналов датчика 49 положения каждой шпалы под каждым рельсом (если таковая не была сделана ранее). Расстояние от устройства считывания метки до исходного положения первой каретки находится в памяти устройства управления как конструктивный параметр. Проехав это расстояние, первая каретка с подбивочным блоком, находящиеся в начале рабочего участке, оказываются над первой шпалой обрабатываемого участка. Устройство управления включает привод перемещения кареток по кольцевым направляющим с последующим включением привода опускания подбивочного блока и привода перемещения балласта под шпалу согласно технологии подбивки. Далее подбивка происходит, как было описано ранее.
Когда машина приближается к концу обрабатываемого участка пути и как только будет подан сигнал о конце участка подбивки шпал или считывающее устройство определит наличие метки, устройство управления включает отсчет оставшегося расстояния до конца пути. Когда машина проедет расстояние, превышающее расстояние (конструктивный параметр) от устройства считывания метки до исходного положения первой каретки, т.е. шпала, напротив которой нанесена метка, начнет обрабатываться подбивочным блоком, устройство управления прекратит подавать сигналы на опускание подбивочных блоков. Последующие подбивочные блоки будут перемещаться без опускания подбоек в балласт, а блоки, еще контактирующие с балластом, продолжат подбивку шпал. Когда последний подбивочный блок закончит подбивать шпалу и поднимется в верхнее положение, все рабочие органы остановятся, работа машины закончится.
Сигнал на окончание работы машины может быть инициирован счетчиком циклов опускания подбивочных блоков или сигналом оператора для преждевременного окончания работы. По указанному сигналу устройство управления прекратит подавать сигналы на опускание подбивочных блоков и закончит работу машины, как описано ранее.
При переходе машины с прямого пути на радиусный путь или с большего радиуса на меньший ось рельса смещается в наружную сторону кривизны пути. Устройство управления в зависимости от величины кривизны пути и взаимного расположения в продольном направлении приводов подвижной рамы (или рам) и осей ходовых тележек, путем соответствующего перемещения, устанавливает кольцевые направляющие параллельно хорде кривой зоны контакта подбоек с балластом.
Это же может быть произведено с помощью датчика поперечного положения кольцевых направляющих. Датчик выдает сигнал указанного рассогласования положений рельса и датчика на привод, который перемещает направляющие в наружную сторону кривизны пути. Ввиду превышения скорости перемещения кольцевых направляющих над скоростью смещения оси рельса, наступает момент, когда направляющие и датчик оказываются над осью рельса. Рассогласование положений рельса и датчика исчезает, сигнал с датчика становится равным нулю, привод останавливается.
То же самое получается, если кольцевые направляющие оснащены двумя датчиками поперечного положения, равноудаленными от концов зоны контакта подбоек с балластом. При этом каждый привод 6 и 7 работает от соответствующего датчика, а устройство 54 управления в отслеживании положения кольцевых направляющих над рельсом участия не принимает.
Если скорости приводов 6 и 7 будут пропорциональны рассогласованиям положений датчиков и оси рельса, то в переходных кривых подбивка будет происходить с непрерывным перемещением направляющих относительно машины в поперечном направлении. Указанное перемещение направляющих может производится путем повторяющихся с различной частотой дискретных перемещений с постоянной скоростью, обеспечивающей требуемое положение направляющих над рельсом. При этом величина одного дискретного перемещения не должна превышать величины допустимого отклонения положения направляющих над рельсом.
При переходе машины с радиусного пути на путь большего радиуса или на прямой путь ось рельса смещается во внутреннюю сторону кривизны. Устройство управления, датчик (или датчики) выдает соответствующий сигнал на привод, который перемещает подвижную раму во внутреннюю сторону кривизны пути и положение направляющих и датчика над рельсом восстанавливается. Остальные действия выполняются аналогично, как при переходе машины с прямого пути на радиусный путь.
В начальной фазе «а» (только передняя ходовая тележка находится в кривой) происходит перемещение подвижной рамы путем поворота ее вокруг оси задней ходовой тележки.
В фазе «б» (передняя ходовая тележка, передний участок зоны контакта или передний датчик поперечного положения направляющей находятся в кривой) происходит суммирование поворота подвижной рамы вокруг оси задней ходовой тележки, ее поворота относительно заднего участка зоны контакта или второго датчика поперечного положения направляющих и поперечного перемещения направляющих в наружную сторону кривой.
В фазе «в» (передняя ходовая тележка, вся зона контакта или оба датчика поперечного положения направляющей находятся в кривой) происходит суммирование поворота подвижной рамы вокруг оси задней ходовой тележки, ее поворота вокруг собственной вертикальной оси и поперечного перемещения направляющих в наружную сторону кривой.
В фазах «г» и «д» (передняя и задняя ходовые тележки находятся в радиусной кривой) взаимное перемещение рамы машины и направляющих отсутствует.
В фазах «е», «ж» и «з» все происходит в обратном порядке с поворотом вокруг оси передней тележки и поперечным перемещением направляющих во внутреннюю сторону кривой.
Если датчики поперечного положения кольцевых направляющих располагаются от концов зоны контакта подбоек с балластом на расстояниях 0,146 от длины указанной зоны, тогда максимальное смещение подбоек от оси рельса и зазоры «z» в процессе подбивки будут минимальным и одинаковым в обе стороны от рельса.
В радиусных участках пути расстояние между рельсами больше, чем на прямом пути. Для поддержания соотношения длины зоны контакта подбоек с балластом и расстояния С от датчика до одного из концов этой зоны, датчики 52 (или один из них) перемещают вдоль направляющей приводом 53. Например, при уменьшении длины зоны контакта подбоек с балластом можно переместить вперед по ходу машины только задний датчик. При этом необходимо сместить назад точку исходного положения подбивочных блоков. При смещении обоих датчиков вперед, точка исходного положения подбивочных блоков останется на прежнем месте. Таким образом расстояние D от начала зоны контакта подбоек с балластом при максимальном количестве подбиваемых шпал (или от начала прямолинейного участка замкнутых направляющих) до переднего датчика также может изменяться при уменьшении числа одновременно подбиваемых шпал до D1.
В связи с веерным расположением шпал в радиусных участках пути длина хорд зон контакта подбивочных блоков с балластом наружного и внутреннего рельса различна (см. Фиг.14 и Фиг.15). В радиусных участках пути расстояние между рельсами делают увеличенным в зависимости от величины радиуса. Поэтому при переходе с прямого пути на радиусный и наоборот, в случае выполнения замкнутых направляющих на отдельных подвижных рамах, они могут перемещаться на различные друг от друга расстояния.
Таким образом, кольцевые направляющие всегда находятся над рельсом в оптимальном положении, обеспечивающем наилучшие условия для возможности подбивки большего числа шпал.
Если шпалы расположены строго перпендикулярно пути, управление приводами перемещения кареток может осуществляться от одного датчика, расположенного над одним рельсом.
Если путь низкого качества, т.е. имеются косо расположенные шпалы или наблюдается неравномерность шага расположения шпал - управление каретками каждой направляющей 9 осуществляется от соответствующего датчика 49 определения шпал под рельсом.
По мере считывания сигналов датчика 42 пройденного пути и датчиков 49 определения шпал под соответствующим рельсом, устройство управления вычисляет отклонение Δ каждой шпалы от номинального ее расположения в продольном направлении. Во время перемещения каретки по участку возврата устройство управления 54 подает сигнал на привод ее перемещения. В зависимости от конструкции машины это может быть индивидуальный или дополнительный привод. Сигнал, соответствующий по величине и направлению отклонению положения шпалы от номинального расположения, поступает на привод. В случае смешения шпалы вперед по ходу движения машины индивидуальный привод кратковременно уменьшает скорость или дополнительный привод перемещает каретку относительно номинального положения или тягового органа назад на величину коррекции К, равную отклонению Δ положения шпалы.
При смещении шпалы в противоположную сторону индивидуальный привод кратковременно увеличивает скорость, а дополнительный перемещает каретку вперед по ходу движения тягового органа.
Таким образом, каретка с подбивочным блоком, перемещаясь в исходное положение, оказывается точно над шпалой и дальнейшее перемещение по рабочему участку замкнутой направляющей осуществляет со скоростью перемещения машины.
После осуществления подбивки шпалы и подъема блока в верхнее положение при движении по участку возврата каретка устройством управления возвращается в свое номинальное положение на траектории или с учетом имеющегося отклонения своего положения и отклонения положения следующей шпалы занимает соответствующее положение, чтобы в момент опускания в исходное положение вновь оказаться точно над следующей шпалой.
В реальности количество шпал на одном километре пути, в зависимости от напряженности движения составов, различно. Поэтому даже при соблюдении постоянства шага расположения шпал величина шага па различных участках пути различна и отличается от конструктивного шага расположения подбивочных блоков на направляющих.
При работе на участке пути с шагом расположения шпал tшп, отличным от шага расположения кареток, с блоками tбл на тянущем органе поступают следующим образом.
Тяговый орган перемещают прямо пропорционально скорости машины и шагу tбл расположения кареток на тяговом органе и обратно пропорционально шагу tшп расположения шпал пути. Во время контакта подбоек с балластом каретку дополнительным приводом постоянно перемещают относительно тягового органа. При этом дополнительное перемещение Δl1 каретки относительно тягового органа прямо пропорционально разности шагов расположения шпал пути и расположения кареток на тяговом органе, умноженной на количество одновременно подбиваемых шпал. Дополнительное перемещение каретки производят за время контакта подбоек одного подбивочного блока с балластом. Такое сложение скоростей машины, тягового органа и дополнительного привода обеспечивает неподвижное положение подбивочного блока относительно балласта в продольном направлении пути.
Для обеспечения удобства введения коррекции положения каретки в связи с неравномерностью расположения шпал, а также увеличения ее возможного значения, производят дополнительную коррекцию K1 положения каретки, т.е. исходное положение каретки относительно номинального положения смещают на величину не более величины ее дополнительного перемещения, но в противоположном направлении.
При работе машины при уменьшении радиуса пути с одновременной подбивкой нескольких шпал может оказаться, что поперечное смещение подбивочных блоков превысит величину зазора «z» между лопаткой подбойки и рельсом, т.е. дальнейшая подбивка шпал окажется невозможной.
С целью расширения возможностей машины при работе в кривой на участке пути малого радиуса подбивку производят меньшим количеством подбивочных блоков, чем это технически возможно (см. Фиг.13 и Фиг.17). Уменьшение количества одновременно подбивающих блоков ведет к уменьшению длины зоны контакта подбивочных блоков с балластом, т.е. к уменьшению длины хорды L. При том же радиусе кривой стрела прогиба h уменьшается до величины h2. Уменьшается также и поперечное смещение подбивочного блока относительно рельса до величины h3, которое становится меньше минимального зазора «z» между рельсом и подбойкой. Подбивка участка пути становится возможной.
Для обеспечения возможности работы в радиусных кривых, ввиду разности шагов шпал внутреннего и наружного рельса, производят круговую коррекцию К2 и дополнительное перемещение подбивочных блоков каждого рельса относительно произвольной продольной оси железнодорожного пути, относительно которой производится отсчет перемещения машины, в том числе относительно оси одного из рельс, при этом величина Δl2=(Lнар-Lвнутр)*а/в; 0<К2≤Δl2;
где К2 - величина круговой коррекции;
Δl2 - величина дополнительного перемещения при круговой коррекции;
Lнар, Lвнутр - длины зон контакта подбивочных блоков с балластом соответственно наружного и внутреннего рельса;
а - расстояние от указанной оси до оси рельса, для которого производится расчет круговой коррекции;
в - расстояние между осями рельс.
Направление круговой коррекции К2нар подбивочных блоков над внешним рельсом совпадает с направлением перемещения Δl2 машины, а над внутренним - противоположно, а направление дополнительного перемещения противоположно направлению круговой коррекции. Круговую коррекцию и дополнительное перемещение производят аналогично выполнению дополнительной коррекции и дополнительного перемещения подбивочного блока при разности шагов пути и подбивочных блоков на машине.
Если отсчет перемещения машины производится относительно оси одного из рельс, то круговую коррекцию положения подбивочных блоков над ним, а также их дополнительное перемещение при круговой коррекции не производят (см. фиг.19 и Фиг.20).
Соответственно коррекцию, дополнительную коррекцию и дополнительное перемещение или круговую коррекцию и дополнительное перемещение при круговой коррекции подбивочного блока при различных видах несовпадения положений подбивочного блока и шпалы производят дополнительным приводом путем перемещения каретки относительно общего привода. Причем все виды коррекций производят до касания подбойками балласта, а дополнительные перемещения - во время их контакта.
Индивидуальным приводом указанные коррекции выполняются путем (кратковременного или на всем пути) изменения скорости перемещения каретки в процессе ее перемещения на участке возврата с обеспечением положения подбивочного блока в исходном положении точно над шпалой.
При реальной работе машины для каждой каретки все имеющиеся предварительные смещения от номинального положения (коррекции) подлежат алгебраическому сложению, равно как и дополнительные перемещения.
Кроме того, для каждой каретки все имеющиеся предварительные смещения от номинального положения и дополнительные перемещения можно выполнять общим приводом. При этом необходимо, чтобы все остальные каретки отдельной направляющей, подбивочные блоки которых находятся в контакте с балластом, будут смещены их дополнительными приводами от их существующего положения и получат дополнительные перемещения на величину и со скоростью, равными смещению от номинального положения, и дополнительному перемещению указанной каретки, но в противоположном направлении.
Таким образом, во время подбивки шпал одними подбивочными блоками другие перемещаются к новым шпалам. Процесс подбивки получается непрерывным. Производительность при этом рассчитывается по формуле:
П=3600*n/t шпал/ч;
где t - время контакта подбоек одного блока с балластом, с;
n - количество одновременно подбиваемых шпал, шт.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2534163C1 |
| СПОСОБ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2008 |
|
RU2372440C1 |
| СПОСОБ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ (ВАРИАНТЫ), ШПАЛОПОДБИВОЧНЫЙ АГРЕГАТ (ВАРИАНТЫ) И ПОДБОЙКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2361031C2 |
| СПОСОБ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2468136C1 |
| СПОСОБ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2006 |
|
RU2304654C1 |
| СПОСОБ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2011 |
|
RU2471912C2 |
| СПОСОБ ПОДБИВКИ И СТАБИЛИЗАЦИИ РЕЛЬСОВОГО ПУТИ, ШПАЛОПОДБИВОЧНАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2378444C2 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ ШПАЛОПОДБИВОЧНЫХ МАШИН | 2018 |
|
RU2704764C1 |
| СПОСОБ ВЫПРАВКИ ПУТИ | 2007 |
|
RU2385978C2 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА | 2000 |
|
RU2194108C2 |















Изобретение относится к шпалоподбивочным машинам. Непрерывная подбивка шпал обеспечивается несколькими подбивочными блоками над каждым рельсом. Во время подбивки шпалы одним подбивочным блоком другой подбивочный блок перемещают в исходное положение для подбивки следующей шпалы. Машина для непрерывной подбивки шпал имеет продольные направляющие, по которым перемещаются каретки подбивочных блоков. Продольные направляющие выполнены кольцевыми с прямолинейным участком. Каретки на продольных направляющих расположены в количестве не менее двух над каждым рельсом. Решение направлено на повышение производительности. 2 н. и 23 з.п. ф-лы, 22 ил.
1. Способ непрерывной подбивки шпал железнодорожного пути, содержащий операции непрерывного перемещения машины, остановки подбивочного блока над подбиваемой шпалой, его опускания, подбивки балласта, подъема подбивочного блока в верхнее положение и перемещения к следующей шпале, при этом скорость перемещения подбивочного блока относительно машины во время его контакта с балластом равна скорости перемещения машины по рельсам, отличающийся тем, что подбивку производят несколькими подбивочными блоками над каждым рельсом, во время подбивки шпалы одним подбивочным блоком другой перемещают в исходное положение для подбивки следующей шпалы, при этом скорость перемещения машины прямо пропорциональна произведению среднего расстояния между соседними шпалами на количество одновременно подбиваемых шпал и обратно пропорциональна времени контакта одного подбивочного блока с балластом.
2. Способ непрерывной подбивки шпал железнодорожного пути по п.1, отличающийся тем, что подбивку производят минимум тремя подбивочными блоками над каждым рельсом, а скорость перемещения подбивочного блока по кольцевым направляющим в исходное положение относительно машины равна скорости перемещения подбивочного блока относительно машины во время контакта последнего с балластом.
3. Способ непрерывной подбивки шпал железнодорожного пути по п.1, отличающийся тем, что подбивку производят минимум двумя подбивочными блоками над каждым рельсом, а скорость перемещения подбивочного блока по кольцевым направляющим в исходное положение относительно машины отличается от скорости перемещения подбивочного блока относительно машины во время его контакта с балластом.
4. Способ непрерывной подбивки шпал железнодорожного пути по п.1, отличающийся тем, что в переходных кривых подбивку производят с непрерывным перемещением направляющих относительно машины в поперечном направлении, причем при движении с прямого пути на радиусный или с большего радиуса на меньший поперечное перемещение направлено в наружную сторону радиуса, а при движении с радиусного на прямой путь или с меньшего радиуса на больший - во внутреннюю.
5. Способ непрерывной подбивки шпал железнодорожного пути по п.1, отличающийся тем, что в радиусных кривых подбивку производят с начальным смещением подбивочного блока в наружную сторону кривизны пути.
6. Способ непрерывной подбивки шпал железнодорожного пути по п.5, отличающийся тем, что направляющие для продольного перемещения подбивочных блоков на участке контакта последних с балластом устанавливают параллельно хорде, а величина смещения исходного положения подбивочного блока равна половине стрелы прогиба рельса на указанном участке.
7. Способ непрерывной подбивки шпал железнодорожного пути по п.1, или 5, или 6, отличающийся тем, что одновременно подбивку производят меньшим количеством подбивочных блоков, чем это возможно на прямом пути.
8. Способ непрерывной подбивки шпал железнодорожного пути по п.1, отличающийся тем, что исходное положение подбивочных блоков определяют с учетом отклонения фактического положения шпал от номинального расположения и до начала контакта подбоек с балластом производят коррекцию исходного положения подбивочных блоков, т.е. их смещение на величину и в сторону указанного отклонения.
9. Способ непрерывной подбивки шпал железнодорожного пути по п.1 или 8, отличающийся тем, что положение подбивочных блоков над обоими рельсами определяют с учетом расположения шпал под одним рельсом.
10. Способ непрерывной подбивки шпал железнодорожного пути по п.3, отличающийся тем, что при разности номинального шага шпал пути и конструктивного шага расположения подбивочных блоков во время подбивки блоки дополнительно перемещают в сторону, противоположную указанной разности.
11. Способ непрерывной подбивки шпал железнодорожного пути по п.10, отличающийся тем, что перед подбивкой производят дополнительную коррекцию исходного положения подбивочных блоков, при этом величина дополнительной коррекции находится в пределах 0<K1≤Δl1 и направлена в сторону, противоположную направлению дополнительного перемещения;
где K1 - величина дополнительной коррекции;
Δl1 - величина дополнительного перемещения.
12. Способ непрерывной подбивки шпал железнодорожного пути по п.1, отличающийся тем, что для компенсации разности шагов шпал внутреннего и наружного рельса в радиусных кривых производят круговую коррекцию и дополнительное перемещение подбивочных блоков вдоль произвольной продольной оси железнодорожного пути, относительно которой производится отсчет перемещения машины, в том числе относительно оси одного из рельс, при этом величина Δl2=(Lнар-Lвнутр)·а/в; K2=Δl2/2;
где Δl2 - величина дополнительного перемещения;
К2 - величина круговой коррекции;
Lнар, Lвнутр - длины хорд зон контакта подбивочных блоков с балластом соответственно наружного и внутреннего рельса;
а - расстояние от указанной оси до оси рассматриваемого рельса;
в - расстояние между осями рельс;
при этом направление круговой коррекции подбивочных блоков над внешним рельсом совпадает с направлением перемещения машины, а над внутренним - противоположно, а направление дополнительного перемещения противоположно направлению круговой коррекции.
13. Машина для осуществления способа непрерывной подбивки шпал железнодорожного пути, содержащая раму, установленную на ходовых тележках, установленные на раме поперечные направляющие и привод для перемещения по ним продольных направляющих, каретку, снабженную приводом для передвижения по продольным направляющим, с вертикальными направляющими и приводом для перемещения по ним подбивочного блока, отличающаяся тем, что продольные направляющие выполнены кольцевыми, имеющими прямолинейный участок, каретки на них располагаются не менее двух над каждым рельсом.
14. Машина по п.13, отличающаяся тем, что она снабжена датчиком определения положения шпалы под рельсом.
15. Машина по п.13, отличающаяся тем, что она снабжена устройством для нанесения метки на путь и устройством считывания метки с пути.
16. Машина по п.13, отличающаяся тем, что она снабжена минимум одним устройством для определения поперечного положения прямолинейного участка кольцевой направляющей относительно рельса.
17. Машина по п.16, отличающаяся тем, что она снабжена двумя устройствами для определения поперечного положения прямолинейного участка кольцевой направляющей относительно рельса, и минимум одно из них выполнено с возможностью продольного перемещения от привода.
18. Машина по п.13, отличающаяся тем, что она снабжена устройством управления, содержащим передатчик беспроводного управляющего сигнала, а рабочий орган содержит приемник указанного сигнала, связанный с приводом исполнительного механизма.
19. Машина по п.13, отличающаяся тем, что кольцевые направляющие установлены на отдельных подвижных рамах.
20. Машина по п.13 или 19, отличающаяся тем, что подвижная рама выполнена с возможностью вертикального перемещения от привода относительно рамы машины.
21. Машина по п.13 или 19, отличающаяся тем, что каждая каретка снабжена индивидуальным регулируемым приводом перемещения по кольцевым направляющим.
22. Машина по п.13, отличающаяся тем, что привод перемещения кареток по кольцевым направляющим снабжен минимум одним гибким тяговым элементом, соединенным с каретками одной направляющей.
23. Машина по п.22, отличающаяся тем, что привод перемещения кареток по кольцевым направляющим выполнен регулируемым в зависимости от скорости передвижения машины.
24. Машина по п.22, отличающаяся тем, что привод перемещения кареток по кольцевым направляющим кинематически связан с приводом передвижения машины.
25. Машина по п.22 или 24, отличающаяся тем, что каждая каретка снабжена дополнительным приводом ее перемещения по кольцевым направляющим.
| Станок для насечка и разводки зубьев на ножовочных полотнищах | 1927 |
|
SU9930A1 |
| СПОСОБ И МАШИНА ДЛЯ ПОДБИВКИ ШПАЛ РЕЛЬСОВОГО ПУТИ | 2001 |
|
RU2225908C2 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА | 2003 |
|
RU2256736C2 |
| Непрерывно передвигающаяся в процессе работы выправочно-подбивочно-отделочная машина | 1989 |
|
SU1655306A3 |

