(21)4417204/23-03
(22)27.04.88
(46) 23.02.90. Бюл. № 7
(71)Уфимский авиационный институт им. Серго Орджоникидзе
(72)М.А. Ураксеев,О.Н.Штанько, Г.В.Миловзоров и Р.А.Султанаев (53) 622.242 (088.8)
(56) Авторское свидетельство СССР N 10025 7, кл. Б 21 В 47/02, 1981.
Авторское свидетельство СССР № 1467162, кл. Е 21 В 47/02, 1988.
(54) УСТРОЙСТВО ОПРЕДЕЛЕНИЯ АЗИМУТА ИСКРИВЛЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ
(57) Изобретение относится к технике бурения и позволяет повысить точность определения азимута скважины (С) в ферромагнитных средах. Устройство содержит корпус 1, выполненный в виде связанных между собой разъемным соединением двух частей 4 и 5, между которыми размещены съемные вставки 6. В верхней 4 и нижней 5 частях установлены первый датчик (Д) 2 и второй
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения азимута искривления траектории скважины | 1986 |
|
SU1467162A1 |
| ИНКЛИНОМЕТР | 1998 |
|
RU2172828C2 |
| Преобразователь азимута инклинометра | 1984 |
|
SU1221334A1 |
| ИНКЛИНОМЕТР (ВАРИАНТЫ) | 1998 |
|
RU2134427C1 |
| Способ определения азимута | 1985 |
|
SU1388551A1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| Азимутальный датчик инклинометра | 1984 |
|
SU1257178A2 |
| УСТРОЙСТВО КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ДЕФЕКТОВ ЦЕМЕНТИРОВАНИЯ В ОБСАЖЕННЫХ НАКЛОННО НАПРАВЛЕННЫХ СКВАЖИНАХ | 1991 |
|
RU2072536C1 |
| Феррозондовый датчик азимута | 1979 |
|
SU802535A1 |
| Устройство для измерения азимута скважины | 1976 |
|
SU709805A1 |
Изобретение относится к технике бурения и позволяет повысить точность определения азимута скважины (С) в ферромагнитных средах. Устройство содержит корпус 1, выполненный в виде связанных между собой разъемным соединением двух частей 4 и 5, между которыми размещены съемные вставки 6. В верхней 4 и нижней 5 частях установлены первый датчик (Д) 2 и второй Д 3 направления горизонтальной составляющей вектора напряженности магнитного поля. Д 2 и 3 выполнены в виде внешних рамок (Р) 7,8 и внутренних Р 9,10, оси вращения которых взаимно перпендикулярны. На Р 7-10 закреплены эксцентричные грузы 14,13,11 и 12. На осях вращения Р 7 и 8 установлены Д 19 и 20 угла поворота. В искривленной С под действием грузов 11 и 12 устанавливаются Р 9 и 10 в одной плоскости. По разности показаний Д 2 и 3 с учетом показаний Д 19 и 20 определяют значение угла поворота аномального магнитного поля в горизонтальной плоскости. Вторым Д 3 определяют значение азимутального искривления С относительно вектора аномального магнитного поля. Суммируют полученные значения со значением известного азимута в устье С и по величине суммы определяют азимут искривления траектории С. 1 з.п.ф-лы, 2 ил.
КО
СП
4 4
СО О 4
4Ы
Д 3 направления горизонтальной составляющей вектора напряженности магнитного поля. Д 2 и 3 выполнены в виде внешних рамок (Р) 7,8 и внутренних Р 9, 10, оси вращения которых взаимно перпендикулярны. На Р 7-Ю закреплены эксцентричные грузы И,13, 11 и 12. На осях вращения Р 7 и 8 установлены Д 19 и 20 угла поворота. В искривленной С под действием грузов 11 и 12 устанавливаются Р 9 и 10 в одной плоскости. По разности поИзооретение относится к технике бурения скважин и предназначено для йпределения азимута искривления тра- гктории скважины в ферромагнитных
:редах.
Цель изобретения-повышение точности измерения.
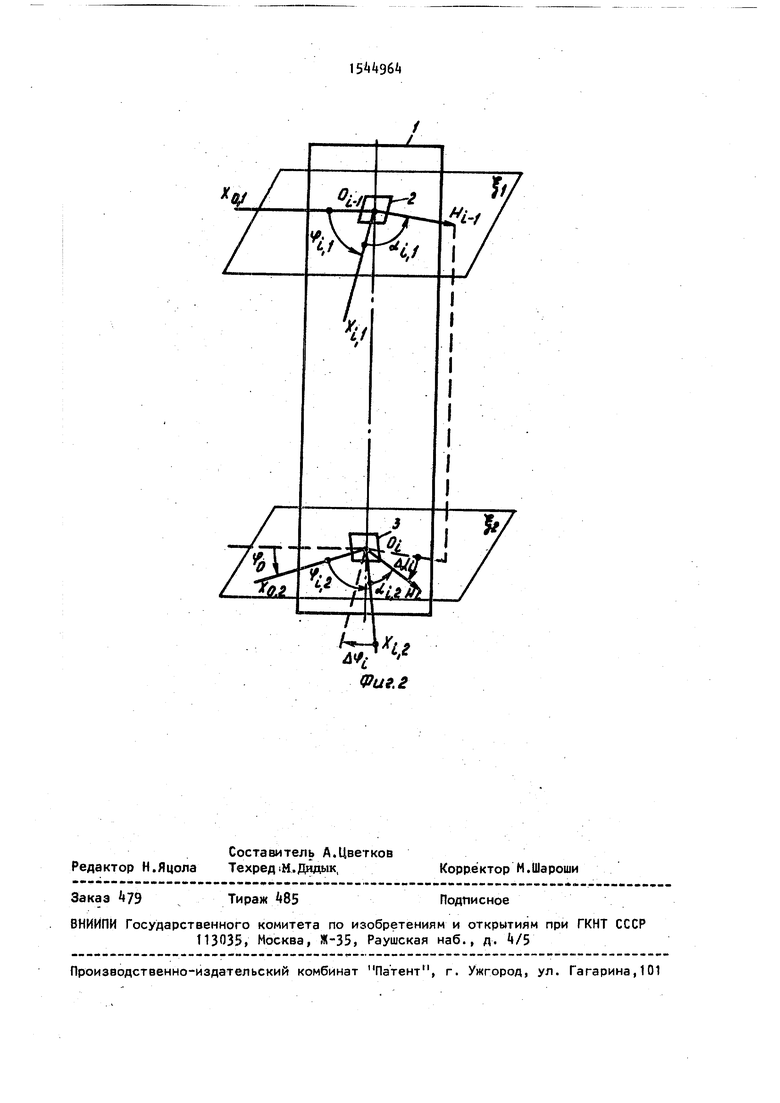
На фиг. 1 приведено устройство определения азимута искривления скважи- ны; на фиг. 2 - векторная диаграмма, поясняющая принцип действия устройства .
Устройство содержит корпус 1 , в ,котором один над другим размещены первый 2 и второй 3 датчики направления горизонтальной составляющей вектора напряженности магнитного поля. Корпус 1 выполнен составным в виде двух частей k и 5 цилиндрической фор- мы, размещенных одна над другой и связанных между собой разъемным сое- динением. Первый 2 размещен в верхней части Ц корпуса 1, а второй датчик 3 - в его нижней части 5. Между верхней 4 и нижней 5 частями корпуса 1 размещены съемные цилиндрические вставки 6. Датчики 2 и 3 выполнены в виде установленных в корпусе 1 внешних рамок 7 и 8, оси враще- ния которых совмещены с продольной осью корпуса 1. Во внешних рамках 7 и 8 закреплены внутренние рамки 9 и 10, оси вращения которых перпендикулярны осям вращения внешних рамок 7 и 8. На внутренних рамках 9 и 10 и внешней рамке 8 второго датчика 3 закреплены основные эксцентричные грузы 11-13. Дополнительный эксцентричный груз 1 закреплен на внешней рамке 7 первого датчика 2.
На внутренних рамках 9 и 10 расположены две пары феррозондов 15,16
казаний Д 2 и 3 с учетом показаний Д 19 и 20 определяют значение угла поворота аномального магнитного поля в горизонтальной плоскости. Вторым Д 3 определяют значение азимутального искривления С относительно вектора аномального магнитного поля. Суммируют полученные значения со значением известного азимута в устье С и по величине суммы определяют азимут искривления траектории С. 1 з.п.ф-лы, 2 ил.
и 17,18, оси чувствительности которых в каждой паре ортогональны и расположены в плоскости внутренних рамок 9 и 10. Вдоль оси вращения последних размещена ось чувствительности одного из феррозондов 15 и 17 каждой пары. Оси чувствительности феррозондов 16 и 18 являются осями чувствительности соответственно датчиков 2 и 3 направления горизонтальной составляющей вектора напряженности магнитного поля. На осях вращени внешних рамок 7 и 8 установлены датчики 19 и 20 угла поворота.
Устройство работает следующим образом.
Располагают датчики 2 и 3 направления горизонтальной составляющей вектора напряженности магнитного поля, находящиеся соответственно в верхней Ц и нижней 5 частях корпуса на расстоянии равном шагу измерений, величину которого выбирают от 5 до 20 м и задают числом и длиной цилиндрических вставок 6. Перед началом измерений определяют угол между осями Х01и Х02( при совмещении с которыми осей чувствительности датчиков 2 и 3 направления горизонтальной составляющей вектора напряженности магнитного поля сигналы с датчиков |19 и 20 угла поворота внешних рамок 7 и 8 равны нулю. Для этого располагают устройство в горизонтальной плоскости, при этом рамки 7 и 8 под действием эксцентричных грузов 1 и 13 устанавливаются в одной плоскости, а угол ч 0равен
о MVi- V,,., ,
где tf, и сигналы соответственно с датчиков 19 и 20 угла поворота внешних рамок 7 и 8.
ha вертикальных участках скважины и при малых углах наклона внешние рамки 7 и 8 устанавливаются произвольно. С помощью датчиков 19 и 20 угла поворота внешних рамок 7 и 8 на каждом интервале измерения определяют угол д/( ср.- (vu+ ) между осями Х,-(1и Х;(1 чувствительности датчиков 2 и 3 направления горизонтальной составляющей вектора напряженности магнитного поля. На участках, раных интервалу измерения, определяют и фиксируют угол d;,, между осью чувсвительности датчика 2 и направлением горизонтальной составляющей Н 1-.1 вектора напряженности магнитного поля, а также измеряют и фикси руют угол at; между осью чувствительности датчика 3 и направлением горизонтальной составляющей hL вектора напряженност магнитного поля. Угол ud, поворота вектора аномального магнитного поля в горизонтальной плоскости определяю как
rJ,it- ai/i-of,,,.
При появлении искривления скважины рамки j и 10 под действием эксцентричных грузов 11 и 12 устанавливаются в одной плоскости, а значение угла д ifi становится равным нулю и не влияет на дальнейшие измерения. ha искривленных участках скважины нижним датчиком 3 направления горизонтальной составляющей вектора напряженности магнитного поля измеряют магнитный азимут d искривления траектории скважиныотносительно вектора аномального магнитного поля, после чего азимут искривления траектории скважины относительно произвольно выбранного направления определяют из уравнения:
и
n -°10+ n,i+ arf,
где о(в- угол между произвольно выбраным направлением и горизонтальной составляющей вектора напряженности магнитного Поля в устье скважины; п - число интервалов (замеров). Предлагаемым устройством обеспечивается возможность измерения угла между внешними рамками, что позволяет учесть его при определении угла
поворота вектрра напряженности ано мального магнитного поля и обуславливает тем семым повышение точности измерения. Выполнение корпуса составным в виде раз.ъемных частей позволяет использовать эти части как самостоятельные устройства для измерения азимута в скважинах, в которых аномалии магнитного поля отсутствуют или несущественны, что расширяет эксплуатационные возможности устройства.
Формула изобретения
5
0
0
и нижней частями корпуса размещены 5 съемные цилиндрические вставки.
5
0
5
0
Редактор Н.Яцола
Составитель А.Цветков Техред 1М.Дидык,
Заказ 79
Тираж 485
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. ч/5
в. - -...«. - - - - - - -- - - t - - .- - --.- - -« - - --- - - « --- - - - - - -
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина,101
-№
Фиг, г
Корректор М.Шароши
Подписное
