1
Изобретение относится к промыс- ловой геофизике и может быть использовано для определения азимута искривления траектории скважины в ферромагнитных средах.
Целью изобретения является повышение точности определения азимута в ферромагнитных:-: средах.
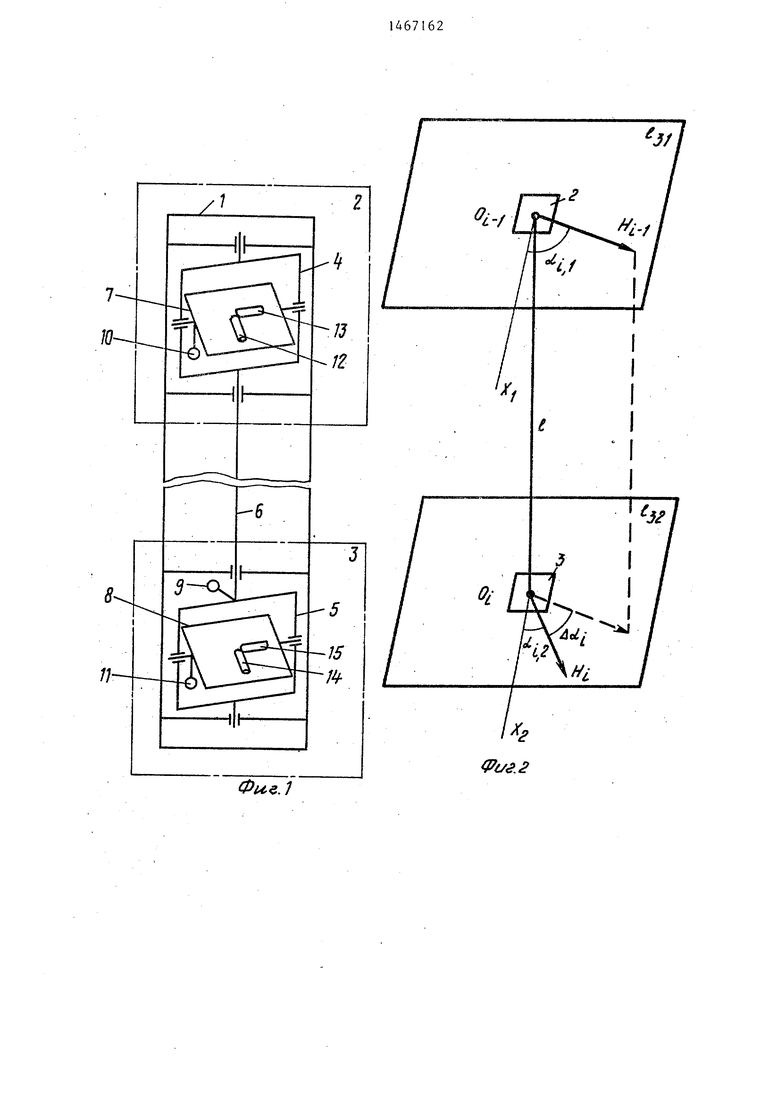
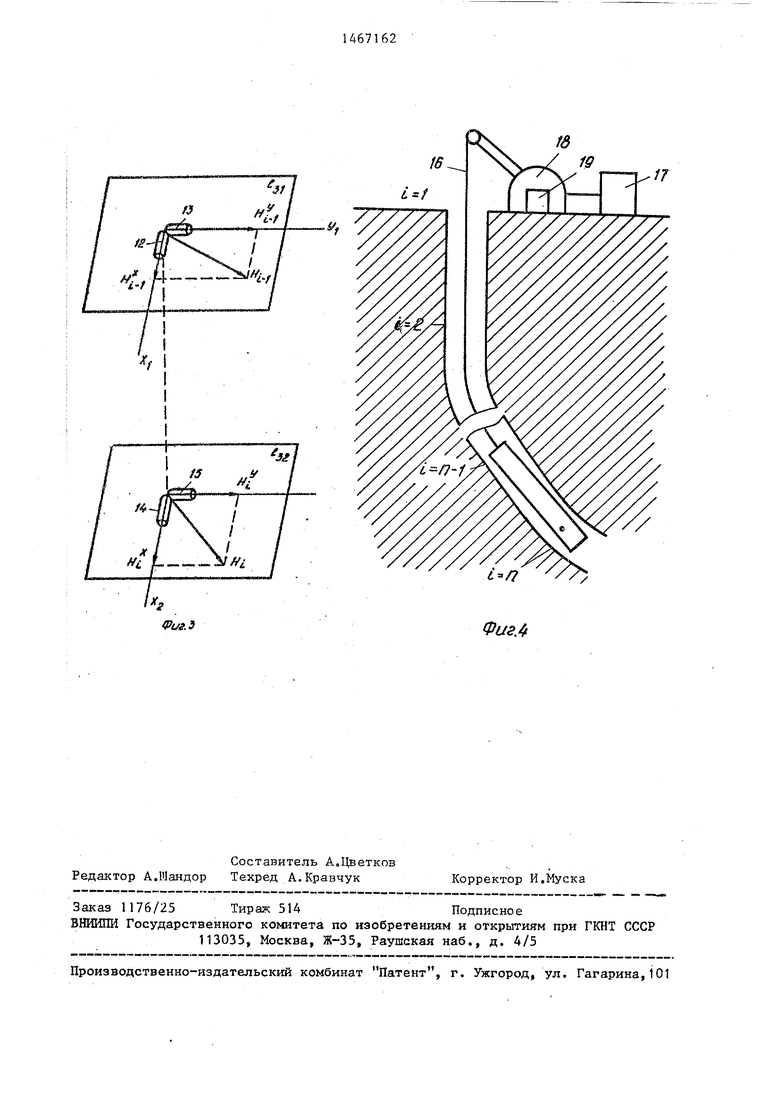
На фиг.1 показано устройство для осуществления способа; на фиг.2 - векторная диаграмма, поясняющая сущность предлагаемого способа; на фиг.З - векторная диаграмма, поясня- кщая работу устройства; на фиг,4 - схема проведения измерений по предлагаемому способу.
.3 1
Способ осуществляют следующим образом.
На расстоянии 1,равном интервалу (шагу) измеренияJ устанавливают друг над другом два идентичных датчика 2 и 3 ГФИГ.1) направления горизонталной составляющей магнитного поля (например, феррозондовые) так чтобы их оси X и Xj, чувствительности находились соответственно в горизонтальных плоскостях , 2. ьши параллельны друг другу и при отклонении скважины от вертикального поло- жения находились в плоскости наклона скважины, опускают взаимно ориентированные датчики 2 и 3 в скважину так, чтобы верхний датчик 2 находился в устье скважины, где предварительно измеряют и фиксируют уголк,, между горизонтальной составляющей магнитного поля и произвольно выбранным направлением, относительно которого последовательными измерениями в скважине определяют азимут иск ривления траектории скважины (например , с помощью тех же датчиков 2 и 3 направления горизонтальной составляющей магнитного поля, направляя оси чувствительности X, и Х, датчиков 2 и 3на выбранное направление), и производят первое измерение.
При последующих измерениях в процессе спуска на каждом интервале верхний датчик 2 размещают в месте расположения нижнего датчика 3.
Датчики 2 и 3 направления горизонталной составляющей магнитного поля выдаю сигналы, пропорциональные углам oij и между осями X, и Х чувствитель- ности датчиков 2 и 3 и направлениями горизонтальных составляю- щих Н, и Н магнитного поля в точках 0- и О; траектории скважины, где находятся соответственно датчи- ки 2 и 3, На каждом интервале измерения измеряют и фиксируют углыс ;, и oi;,4 .
Если направление, горизонтальных составляющих, магнитного поля И-.,, и Hj одинаково, разность сигналов с датчиков 2 и 3 равна нулю, если же направление горизонтальной составляющей магнитного поля на промежутке траектории скважины между верхним и нижним датчиками 2 и 3 изменилось на некоторый угол , разность сигналов с датчиков 2 и 3 будет пропорциональная этой величине.
62
На участкахJравных интервалу измерения ,. определяют и фиксируют угол uoi; ,i ,i поворота вектора аномального магнитного поля в горизонтальной плоскости. При появлении искривления скважины сигналы с датчиков 2 и 3 пропорциональны магнитному азимуту искривления траектории скважины относительно направления горизонтальных составляющих вектора магнитного поля Н,, и Н,- в точка траектории скважины О;.., и О,, где находятся соответствующие датчики 2 и 3, а разность сигналов с датчиков 2 и 3 пропорциональна углу Aod; между горизонтальными проекциями Н,-., и Н;.
На искривленных участках скважины нижним датчиком 3 направления горизонтальной составляющей вектора нап- ряженности магнитного поля измеряют магнитный азимут (х;, искривления траектории скважины относительно вектора -аномального- магнитного поля, после чего азимут искривления траектории скважины относительно выбранного направления определяют в точках, где находится нижний датчик 3, из уравнения
oc, oi. + oi,,
Aoi;,
(1)
где п - число, интервалов измерения (замеров), .
Устройство для осуществления способа состоит из корпуса 1 и датчиков 2 и 3 направления горизонтальной составляющей магнитного поля, содержащих рамки А и 5, щтангу 6, внутренние рамки 7 и 8, эксцентричные грузы 9 - 11, феррозонды 12 - 15, Рамки 4 и 5 установлены в противоположных концах корпуса 1, причем оси вращения рамок 4 и 5 совпадают с продольной осью корпуса 1, штанга 6 связывает рамки 4 и 5 так, чтобы они лежали в одной плоскости. Внутренние рамки 7 и 8 закреплены соответственно в рамках .4 и 5, причем оси вращения рамок 7 и 8 перпендикулярны осям вращения рамок 4 и 5. Эксцентричный груз 9 закреплен на рамке 5, а эксцентричные грузы 10 и 11 - соответственно на внутренних рамках 7 и 8. Феррозонды 12 и.13 расположены в плоскости рамки 7, причем оси чувствительности феррозондов 12 и 13
ортогональны, феррозонды 14 и 15 расположены в плоскости рамки 8 и их оси чувствительности также ортогональны, при этом оси чувствительности феррозондов 13 и 15 совпадают соответственно с осями.вращения внутренних рамок 7 и 8, а ock чувствительности феррозондов 12 и 14 являются осями чувствительности соответственно датчиков 2 и 3.
Способ осуществляется с помощью устройства следующим образом.
На вертикальном участке траектории скважины рамки 4 и 5, жестко связанные штангой 6, находятся в одной и той же вертикальной плоскости, эксцентричные грузы 10 и 11 ориентируют соответственно внутренние рамки 7 и 8 с установленными на них феррозондами 12 - 15 в горизонтальных плоскостях , и (фиг.З)
Сигналы }
i
15 соответственно с
феррозондов 12-15 пропорциональны проекциям Н,,,, Н и Н, Н горизонтальных составляющих магнитного поля Н,-., и Н на их оси чувствительности X,, Y, и Х, Y,. Сигналы с феррозондов 12-15 передаются по кабелю 16 связи (фиг.4) в наземный пульт 17 По этим сигналам осзгществляют вычисление угла между осью чувствительности верхнего датчика .2 (фиг.О и направлением горизонталь- ной составляющей вектора напряженности магнитного поля Н,, и угла между осью чзгвствительности нижнего датчика 3 и направлением горизонтальной составлякяцей вектора напря- женности магнитного поля Н;
,Arctg- ;,. Arctg .
(2)
Далее с учетом выражения (2) определяют величину &oi;
Aoi- Arctg - Arctg .
и-с-Uia
На искривленном участке траектории скважины эксцентричный груз 9 (фиг.2) ориентирует рамки 4 и 5 в плоскости, перпендикулярной плоскости наклона, при этом оси чувствительности датчиков 2 и 3 направления горизонтальной составляющей вектора напряженности магнитного поля устанавливаются в плоскости наклона сква10
4671626
жины, поэтому на искривленных участках угол Рзвен магнитному азимуту относительно вектора аномального магнитного поля.
Т аким образом, посредством измерения сигналов и,- и,5- с феррозондов 12 - 15 согласно предложенному спосо- : бу последовательно определяют углы йоС; поворота вектора аномального магнитного поля в горизонтальной плоскости между точками траектории скважины, где находятся датчики 2 и 3. На расстоянии, равном интервалу измерения, на искривленном участке с помощью нижнего датчика 3 измеряют a3HMyToin j относительно вектора аномального магнитного поля. Суммируя углыЛоС;и учитывая угол oi-o между выбранным направлением и направлением горизонтальной составляющей вектора напряженности магнитного поля в устье скважины, определяют азимут искривления траектории скважины относительно выбранного направления в соответствии с выражением,.
15
20
25
30
о6„+о1„, +
Дог..
Для реализации предлагаемого способа с помощью устройства у устья скважины устанавливают лебедку 18 (фиг.4) со счетчиком 19 метража кабеля 16, на торце корпуса 1 (фиг.2) устройства делают риску так, чтобы ее направление совпадало с направлеQ нием осей чувствительности феррозон- .дов 12 и 14, опускают устройство в скважину так, чтобы та часть корпуса 1 , в которой расположен датчик 2 направления горизонтальной составляg ищей вектора напряженности магнитного поля, находилась в устье скважины, поворачивают корпус 1 устройства так, чтобы направление риски совпадало с направлением, выбранным для
отсчета азимута искривления скважины, после него производят первое измерение. Сигналы V г с феррозондов 12 - 15 по кабелю 16 (фиг.4) поступают в наземный пульт
д 17. По этим сигналам определяют угол ot-Q между выбранным направлением и направлением горизонтальной состав- лякщей вектора напряженности магнитного поля в устье скважины
ftd
M
Arctg
Я угол d6i поворота горизонтальной составляющей вектора напряженности Иагнитного поля первого интервала измерения
Г До, 6. -oi,, - Arctg - - Arctg -.10
Utjи,з
и,,
: С ПОМОЩЬЮ лебедки 18 и счетчика 119 метража кабеля 16 опускают устройство на расстояние 1 (фиг,1), разное расстоянию между датчиками 2 И 3 направления горизонтальной составЛяющей вектора напряженности ного поля, и проводят второе измерение, определяя угол поворота гори : онтапьной составляющей вектора напряженности магнитного поля второго Интервала измерения, ; Таким образом проводят все пос- Ледующие иэмерения на вертикальном : частке скважины. При появлении искривления скважины с помощью датчи- а 3 направления горизонтальной сос- -авляющей вектора напряженности Шгнитного поля определяют магнит- 1Й азимут oifi- искривления траектории скважины относительно вектора Напряженности аномального магнитно- t O поля
; с6„,г Arctg - , :i i5
Где п - количество предшествукщих интервалов-замеров.
Азимут сС искривления траектории скважины относительно выбранного
Направления определяют, как:
и о6„ Ыо-юс„ ч-22 Aoij .
-1
Таким образом, устройство полностью реализует предлагаемый спо- соб. Формула изобретения
Способ определения азимута искривления траектории скважины в ферро-
0
5
0
5
..
5
0
магнитных средах, при котором выбирают на поверхности направление, относительно которого последовательными измерениями в скважине определяют азимут, о т л и ч а ю щ и и - с я тем, что, с целью повьш1ения точности определения -азимута в ферромагнитных средах, измеряют и фиксируют угол ui|3 между выбранным направлением и горизонтальной проекцией вектора напряженности магнитного поля в устье скважины, опускают в скважину взаимно ориентированные и расположенные друг над другом на расстоянии, равном интервалу измерения, два датчика направления горизонтальной составляющей вектора напряженности магнитного поля, при этом на каждом интервале измерения верхний датчик размещают в месте расположения нижнего датчика, измеряют и фиксируют угол ci; между осью чувствительности верхнего датчика и направлением горизонтальной составляющей вектора напряженности магнитного поля в точке траектории скважины, где расположен верхний датчик, измеряют и фиксируют угол (, между осью чувствительности нижнего датчика, и направлением горизонтальной составляющей вектора напряженности магнитного поля в точке траектории скважины, где расположен нижний датчик, на участках, равных интервалу измерения, определяют и фиксируют угол й.ы; оС;, - поворота вектора аномального магнитного поля в горизонтальной плоскости, на искривленных участках скважины нижним . датчиком измеряют и фиксируют магнитный азимут ci искривления траектории скважины относительно вектора аномального магнитного поля, а азимут ос искривления траектории скважины относительно выбранного направления определяют из уравнения
и
Ып .
;-и где п - число интервалов измерения.
Фие.1
%/.
td
п
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство определения азимута искривления траектории скважины | 1988 |
|
SU1544964A1 |
| Способ определения азимута | 1986 |
|
SU1377377A1 |
| Способ определения азимута | 1985 |
|
SU1388551A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2012 |
|
RU2503810C1 |
| ИНКЛИНОМЕТР | 1998 |
|
RU2172828C2 |
| ДАТЧИК МАГНИТНОГО АЗИМУТА | 1990 |
|
RU2018646C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
| Устройство для измерения азимута скважины | 1976 |
|
SU709805A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| БЛОК ПЕРВИЧНЫХ ПРЕОБРАЗОВАТЕЛЕЙ СКВАЖИННОГО МАГНИТОМЕТРА-ИНКЛИНОМЕТРА | 1992 |
|
RU2065184C1 |
Изобретение относится к промысловой геофизике. Цель - повышение точности определения азимута в фер-. ромагнитных средах. Для этого измеряют и фиксируют угол между выбранным направлением и горизонтальной проекцией вектора напряженности магнитного поля в устье скважины (С). Опускают в С взаимно ориентированные и расположенные друг над другом на расстоянии, равном интервалу измерения, два датчика (Д) направления горизонтальной составляющей вектора напряженности магнитного поля. На каждом интервале измерения верхний. Д размещают в месте расположения нижнего. Измеряют и фиксируют угол между осью чувствительности верхнего Д. и направлением горизонтальной составлягацей вектора в точке траектории С, где расположен верхний Д, Измеряют и фиксируют угол gi. между осью чувствительности нижнего и направлением составлянщей вектора в точке траектории С, где расположен нижний Д. На участках, равных интервалу измерения, определяют и фиксируют угол Дог; oi;,2. -ot;, поворота вектора аномального поля в горизонтальной плоскости. На искривленных участках С нижним Д измеряют и фиксируют магнитный азимут п. траектории скважины .относительно вектора аномального магнитного поля. Азимут искривления траектории С относительно выбранного направления определяют из о уравненияo,n ei +,{,„2 ., где i+f n - ЧИСЛО интервалов измерения. 4 ил. fS (Л 4 о: О5 Ю
Фиг.З
Фиг.
| Способ измерения кривизны и азимута буровых скважин и устройство для его осуществления | 1984 |
|
SU1213181A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Калинин А.Г | |||
| Искривление буровых скважин, - М.: Гостоптехиздат, 1963, с | |||
| Джино-прядильная машина | 1922 |
|
SU173A1 |
