(Л
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Модель движущегося объекта | 1985 |
|
SU1359799A1 |
| МОДЕЛЬ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1993 |
|
RU2049360C1 |
| Модель движущегося объекта | 1988 |
|
SU1517061A2 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО МОДЕЛИРОВАНИЯ ГИДРОДИНАМИЧЕСКОГО ПОЛЯ ПОДВОДНОГО ТЕЛА | 1991 |
|
RU2015939C1 |
| Устройство для моделирования гидродинамического поля деталей орудий лова | 1989 |
|
SU1697664A1 |
| Модель тралового мешка | 1989 |
|
SU1711760A2 |
| Модель плоского профильного тела | 1986 |
|
SU1400571A1 |
| Модель рыболовного орудия | 1989 |
|
SU1720073A1 |
| Устройство для моделирования обтекания водой самоходного плавсредства | 1988 |
|
SU1562943A1 |
| Модель плоского профильного тела | 1990 |
|
SU1824135A1 |
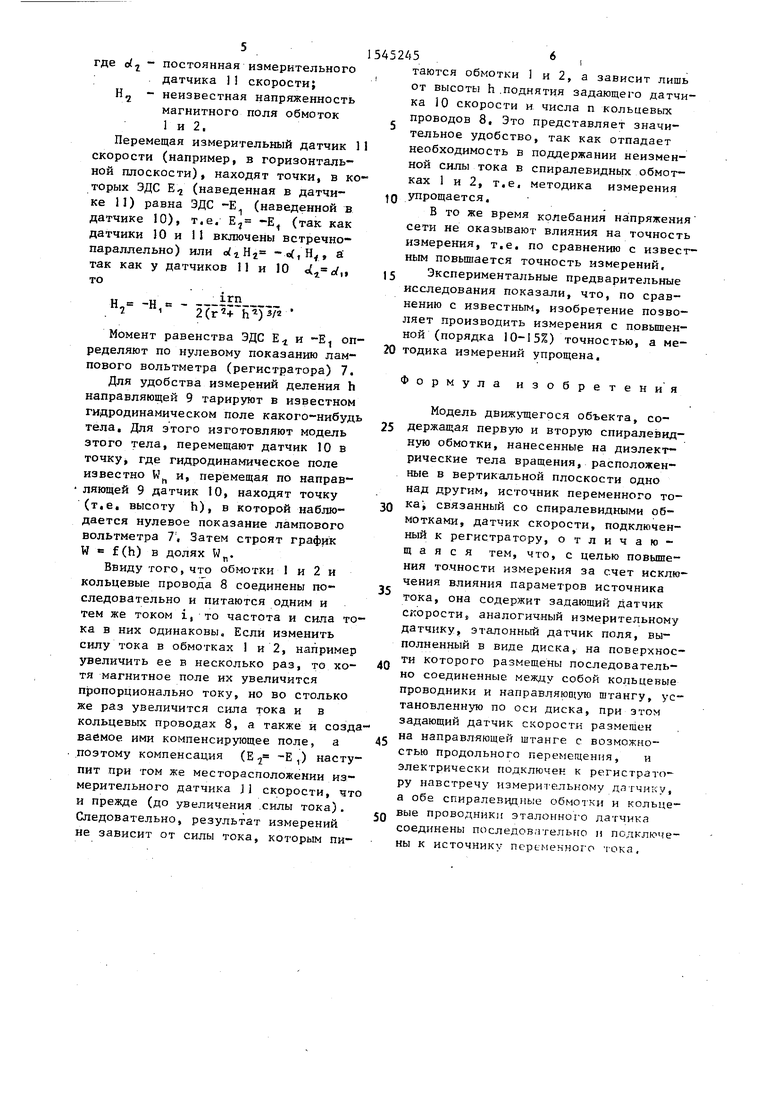
Изобретение относится к электромагнитным моделям для исследования распределения скоростей обтекающей объект жидкой среды и может быть использовано в учебном процессе для демонстрации гидродинамического поля рыб. Цель изобретения - повышение точности измерения за счет исключения влияния параметров источника тока. Модель содержит спиралевидные обмотки 1 и 2, нанесенные на диэлектрические тела вращения 3 и 4, установленные на стойках 5 и 6, источник переменного тока 7, датчик эталонного поля 8, направляющую 9, задающий 10 и измерительный 11 датчики скорости, регистратор 12. 2 ил.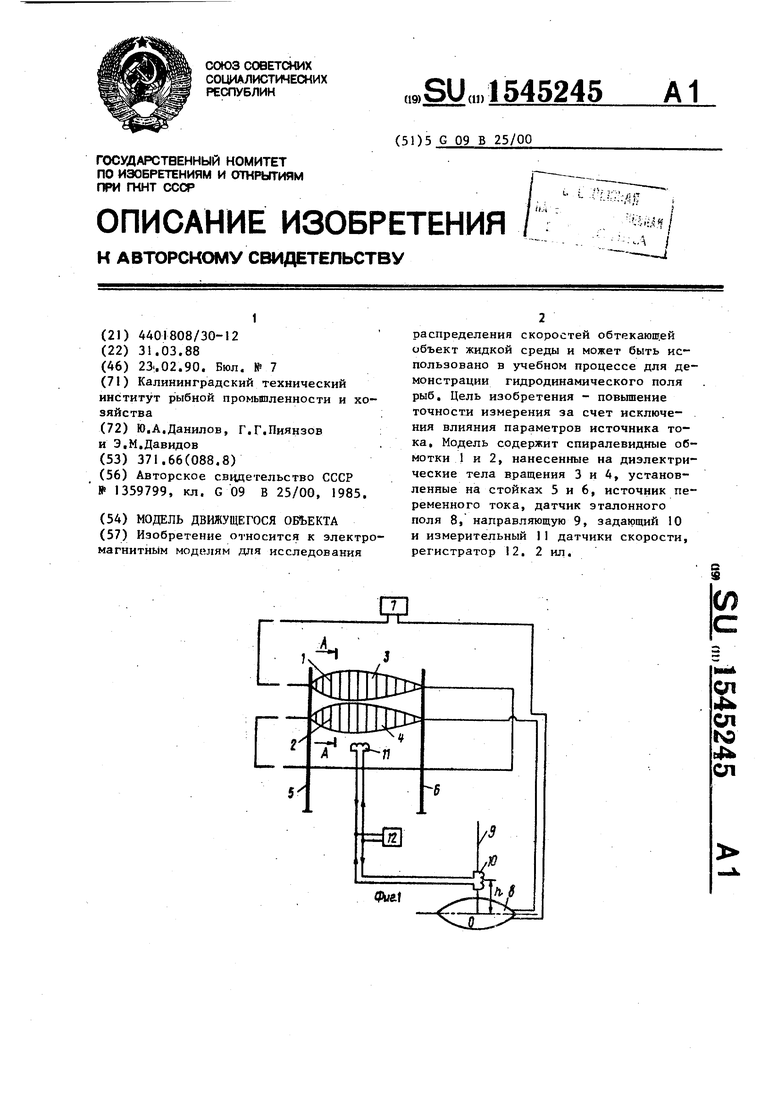
СП
4ъ
сл
чЭ
4ь
сл
Изобретение относится к электромагнитным моделям для исследования распределения скоростей обтекающей объект жидкой среды и может быть ис- с пользовано в учебном процессе для демонстрации гидродинамического поля вызванных скоростей и давлений, создаваемых рыбами.
Цель изобретения - повышение точ- fg ности измерений за счет исключения влияния параметров источника тока.
На фиг. представлена блок-схема модели; на фиг.2 - сечение А-А на Фиг.1.15
Модель движущегося объекта содержит первую 3 и вторую 2 спиралевидные обмотки, снаружи нанесенные на диэлектрические тела 3 и 4 вращения, расположенные в вертикальной плоское- 20 ти друг над другом на диэлектрических стойках 5 и 6. Первый конец первой спиралевидной обмотки 1 подклю-t чен к первой клемме источника 7 переменного тока, а второй конец соеди- 25 нен с первым концом второй спирале-г видной обмотки 2, второй конец которой соединен с первым выводом датчика 8 эталонного поля, второй конец которого подключен к второй клемме 30 источника 7 переменного тока. Этаонный датчик 8 поля выполнен в виде последовательно соединенных кольцеых проводов, нанесенных на диэлектический диск, по оси симметрии кото- ,с рого установлена диэлектрическая на- Правляющая 9, На направляющей 9 установлен с возможностью перемещения и $i фиксации (например,при помощи ползуна) задающий датчик 10 скорости, 40 первый и второй выводы которого соеинены со вторым и первым выводами измерительного датчика 11 скорости, а также подключены к первой и второй Клеммам регистра 12 Первый и второй 45 Выводы измерительного датчика 11 скорости подключены к второй и первой клеммам регистра 12,
Работа с моделью осуществляется следующим образом.50
Исходя из биометрических параметров рыбы, вычитывают в выбранном линейном масштабе диэлектрические (например, из дерева) тела 3 и 4 вращения, сумма площадей каждого попереч- „ ного сечения которых 8,и 5 равна соответствующему поперечному сечению рыбы Sp (фиг.2). На тела 3 и 4 вращения наматывают снаружи спиралевидные
обмотки 1 и 2, соединенные между собой последовательно. Тела 3 и 4 вращения располагают на стойках 5 и 6 Собирают измерительную схему модели согласно фиг,1, выбирая в качестве регистра 12, например, ламповый вольметр, а в качестве измерительного 11 и задающего 10 датчиков скорости
например индукционные катушки.
i
При прохождении по обмоткам 1 и 2 переменного тока звуковой частоты (в проведенных опытах - 800 Гц) в окружающем модель рыбы пространстве возникает переменное магнитное поле, которое в соответствии с магнито-аэр гидродинамической аналогией (МАГА) имитирует гидродинамическое поле вызванных скоростей движущейся без колебаний рыбы. Так как согласно МАГА напряженность Н магнитного поля является аналогом вызванной скорости W то измерив значение Н в окружающем модель пространстве, получают картину гидродинамического поля вызванных скоростей W,
Измерение величины напряженности Н магнитного поля производят следующим образом. .Располагают задающий датчик 10 скорости на направляющей 9 на расстоянии h от центра 0 эталонного датчика 8 поля. Подают переменный ток в обмотки 1 и 2 и в эталонный датчик 8 поля. Переменное магнитное поле Н, датчика 8 на высоте h наводит в датчике 10 электродвижущую силу (ЭДС)
Е, К,,(1)
где of,- постоянная датчика 10;
Н, - напряженность магнитного поля датчика 8, равная
(2)
irn
Н1 2(г5+ пт)э7 где i - переменный ток в датчике 3 и спиралевидных обмотках I и 2; г - радиус кольцевых проводов в эталонном датчике 8 поля; п - число кольцевых проводов в эталонном датчике 8 поля; h -расстояние (высота) точки, в которой расположен задающий датчик 10 скорости, от центра О кольцевых проводов в эталонном датчике В поля,
В то же время переменное магнитное поле HI обмоток 1 и 2 наводит в измерительном датчике 11 скорости ЭДС
Е oUH
i1 i
(3)
где Јг - постоянная измерительного датчика 1 скорости;
Н2 - неизвестная напряженность магнитного поля обмоток 1 и 2.
Перемещая измерительный датчик скорости (например, в горизонтальной плоскости), находят точки, в кторых ЭДС Е.2 (наведенная в датчике И) равна ЭДС -Е1 (наведенной в датчике 10), т.е. Е -Ef (так как датчики 10 и И включены встречно- параллельно ) или al г Н 2 - о(, Hf , а так как у датчиков 11 и 10 ,, то
р н в ,Н2
Н2 Hi 2(r2+ h)3/2
Момент равенства ЭДС Е и -Et определяют по нулевому показанию лампового вольтметра (регистратора) 7.
Для удобства измерений деления h направляющей 9 тарируют в известном гидродинамическом поле какого-нибудь тела. Для этого изготовляют модель этого тела, перемещают датчик 10 в точку, где гидродинамическое поле известно Wn и, перемещая по направляющей 9 датчик 10, находят точку (т.е. высоту h), в которой наблюдается нулевое показание лампового вольтметра 7, Затем строят график W f(h) в долях Wn.
Ввиду того, что обмотки 1 и 2 и кольцевые провода 8 соединены последовательно и питаются одним и тем же током i, то частота и сила тока в них одинаковы. Если изменить силу тока в обмотках 1 и 2, например увеличить ее в несколько раз, то хотя магнитное поле их увеличится пропорционально току, но во столько же раз увеличится сила тока и в кольцевых проводах 8, а также и создваемое ими компенсирующее поле, а поэтому компенсация (Еf -Е,) наступит при том же месторасположении измерительного датчика } скорости, чт и прежде (до увеличения силы тока). Следовательно, результат измерений не зависит от силы тока, которым пи
5452456 ,
таются обмотки I и 2, а зависит лишь от высоты h поднятия задающего датчика 10 скорости и числа п кольцевых проводов 8. Это представляет значительное удобство, так как отпадает необходимость в поддержании неизменной силы тока в спиралевидных обмотках 1 и 2, т.е. методика измерения jg упрощается.
В то же время колебания напряжения сети не оказывают влияния на точность измерения, т.е. по сравнению с известным повышается точность измерений. Ij Экспериментальные предварительные исследования показали, что, по сравнению с известным, изобретение позволяет производить измерения с повышенной (порядка 10-15%) точностью, а ме- 20 тодика измерений упрощена.
ормула изобретения
Модель движущегося объекта, со- держащая первую и вторую спиралевидную обмотки, нанесенные на диэлектрические тела вращения, расположенные в вертикальной плоскости одно над другим, источник переменного то- ка, связанный со спиралевидными обмотками, датчик скорости, подключенный к регистратору, отличающаяся тем, что, с целью повышения точности измерения за счет исключения влияния параметров источника тока, она содержит задающий датчик сгсорости8 аналогичный измерительному датчику, эталонный датчик поля, выполненный в виде диска, на поверхности которого размещены последовательно соединенные между собой кольцевые проводники и направляющую штангу, установленную по оси диска, при этом задающий датчик скорости разметен на направляющей штанге с возможностью продольного перемещения, и электрически подключен к регистратору навстречу измерительному дагчн:,у, а обе спиралевидные обмотки и кольцевые проводники эталонного датчика соединены последов,ательно и подключены к источнику переменного тока.
| Модель движущегося объекта | 1985 |
|
SU1359799A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
