Изобретение относится к машинострое- ию и может быть использовано в промышленных роботах, предназначенных для сборки узлов и деталей.
Целью изобретения является повышение надежности схвата за счет обеспечения контроля с ориентацией детали при захвате.
На фиг. 1 представлена структурная схема электромагнитного схвата; на фиг. 2 - временная диаграмма в исходном состоя- 10 нии схвата; на фиг. 3 - временная диаграмма при правильном захвате детали; на фиг. 4 - временная диаграмма при неправильном захвате детали.
Электромагнитный схват содержит П-об- разный магнитопровод 1, на котором расположены обмотка 2, подсоединенная к источнику переменного напряжения, и обмотка 3, соединенная с одной из фаз этого источника. На боковой поерхности магнитобез возможности притяжения к магнито- проводу 1 - (между деталью 5 и магнито- проводом 1 имеется некоторый зазор). Полученные импульсные сигналы Um(t), Un(t) и Ui2(t) располагаются на временной оси так, что на выходе логического элемента И 13 сигнала нет (фиг. 2). Следовательно, нет сигнала и на выходе блока 6 преобразования. После установки данного режима захват готов к работе.
В случае нормального притяжения дета- ли 5 к магнитопроводу 1 сигналы Uio(t), Uu(t) и Uia(t) располагаются на временной оси, как показано на фиг. 3, и в соответствии с принципом действия элемента И 13 сигнала на его выходе также нет.
Пусть теперь деталь 5 притянута к магнитопроводу 1 с перекосом и имеется зазор под одной из захватывающих губок.
провода установлены ограничительные плас- 20 В этом случае . Сигналы с выходов тинки 4, выступающие за его рабочий усилителей-ограничителей 10-12 располагаются на временной оси в соответствии с фиг. 4. Элемент И 13 формирует сигнал Ui3(t), длительность которого просостоящий из блока 7 суммирования, бло- 2с порциональна времени совместного действия ка 8 вычитания и фазовращателя 9 на сигналов Uio(t), Un(t) и Ui2(t). С помощью порогового элемента 14 из него формируется сигнал определенной длительности, устойчивый к действию помех. Таким образом, устройство получает возможторец, для обеспечения фиксации детали 5 в определенном положении. Кроме того, схват содержит блок 6 преобразования,
угол 90°, соединенные через соответствующие формирователи 10-12 сигналов (например, усилители-ограничители) с входами логического элемента И 13, выход которого соединен с пороговым элементом 14, 30 ность контролировать качество притяжения
например триггером Шмитта. Выход порогового элемента 14 является выходом блока преобразования. Одни из входов блока 7 суммирования и блока 8 вычитания объе- 4 динены между собой и соединены с вторым выходом обмотки 3, а вторые выходы блоков 7 и 8 - с другой фазой источника. Причем выход блока 8 суммирования соединен с входом фазовращателя 9.
На фиг. 1-4 обозначены: U| - напряжение на первичной обмотке магнито- провода 1; а - угол сдвига по фазе между напряжениями U и U2 (где U2 - напряжение на вторично обмотке магни- топровода); U и Us - напряжения с вы
детали к магнитопроводу и в случае перекоса сигнализировать об ошибке и о невозможности дальнейшей эксплуатации устройства. Исходя из особенностей работы блока 8 вычитания и усилителя-ограничи- 35 теля 12 вытекает, что данная совокупность узлов может быть выполнена в виде одного функционального узла - дифференциального усилителя.
40
Формула изобретения
Электромагнитный схват, содержащий П-образный магнитопровод с расположенными на нем двумя обмотками, подключенными к блоку преобразования, вклю- ходов узлов суммирования и вычитания на- 45 чающему два формирователя сигналов, кро- пряжений, причем U7 Ui-|-U2, U8 U2-Ui; ме тога, одна из обмоток подключена к U9 - напряжение с выхода фазовращате- источнику переменного напряжения, отли- ля 9; Uio(t), U(t) и Ui2(t) - импульс- чающийся тем, что, с целью повышения ные сигналы с выходов соответствующих надежности, он снабжен ограничительными усилителейгограничителей; Uis(t) и Uu (t) - пластинками из немагнитного материала, сигналы с выходов логического элемента И 50 установленными на боковой поверхности маг- и порогового элемента 14 соответственно; нитопровода и выступающими за его рабо- - чий торец, а блок преобразования содержит блок суммирования, блок вычитания, фазовращатель, третий формирователь сигналов и последовательно соединенные ло- 55 гический элемент И и пороговый элемент,
Ug и U2 - новые напряжения во вторичной обмотке, обусловленные изменением характеристик магнитопровода 1.
Электромагнитный схват работает следующим образом.
Исходное состояние создается путем закрепления детали 5 в рабочем положении
выход которого является выходом блока преобразования, причем выходы блоков сумбез возможности притяжения к магнито- проводу 1 - (между деталью 5 и магнито- проводом 1 имеется некоторый зазор). Полученные импульсные сигналы Um(t), Un(t) и Ui2(t) располагаются на временной оси так, что на выходе логического элемента И 13 сигнала нет (фиг. 2). Следовательно, нет сигнала и на выходе блока 6 преобразования. После установки данного режима захват готов к работе.
В случае нормального притяжения дета- ли 5 к магнитопроводу 1 сигналы Uio(t), Uu(t) и Uia(t) располагаются на временной оси, как показано на фиг. 3, и в соответствии с принципом действия элемента И 13 сигнала на его выходе также нет.
детали к магнитопроводу и в случае перекоса сигнализировать об ошибке и о невозможности дальнейшей эксплуатации устройства. Исходя из особенностей работы блока 8 вычитания и усилителя-ограничи- теля 12 вытекает, что данная совокупность узлов может быть выполнена в виде одного функционального узла - дифференциального усилителя.
40
Формула изобретения
выход которого является выходом блока преобразования, причем выходы блоков сумЫирования, вычитания и фазовращателя через соответствующие формирователи сигналов подключены к входам логического элемента И, кроме того, выход блока
суммирования подключен к входу фазовращателя, а входы блоков суммирования
и вычитания соединены соответственно с обеими обмотками
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения характеристики частотной избирательности радиоприемного устройства по побочным каналам приема | 1990 |
|
SU1753609A2 |
| Устройство для управления тиристорным инвертором | 1985 |
|
SU1387150A1 |
| Инфузионный насос | 1985 |
|
SU1279635A1 |
| Устройство для управления весовым дозатором | 1984 |
|
SU1272313A1 |
| Регулятор компенсирующего устройства | 1990 |
|
SU1721705A2 |
| Устройство сравнения переменных напряжений по амплитуде | 1986 |
|
SU1405022A1 |
| КОДОВЫЙ ЗАМОК ДЛЯ КОНТЕЙНЕРОВ | 2003 |
|
RU2240414C1 |
| Устройство для магнитотерапии | 1990 |
|
SU1804863A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
Изобретение относится к машиностроению и может быть использовано в промышленных роботах, предназначенных для сборки узлов и деталей. Целью изобретения является повышение надежности схвата за счет обеспечения контроля за ориентацией детали при захвате. Электромагнитный схват содержит П-образный магнитопровод 1, на котором расположены обмотки 2 и 3, подключенные к блоку преобразования 6. Магнитопровод снабжен ограничительными пластинками 4 из немагнитного материала, установленными на боковой поверхности магнитопровода 1 и выступающими за его рабочий торец. Блок преобразования 6 содержит блок вычитания 8, блок суммирования 7 и фазовращатель 9, которые через соответствующие формирователи сигналов 10 - 12 соединены с логическим элементом И 13, выход которого соединен с пороговым элементом 14. Сигнал с порогового элемента является выходом блока преобразования 6. В случае притяжения детали 5 к магнитопроводу 1 с перекосом блок преобразования 6 выдает сигнал, свидетельствующий о неправильном захвате детали. 4 ил.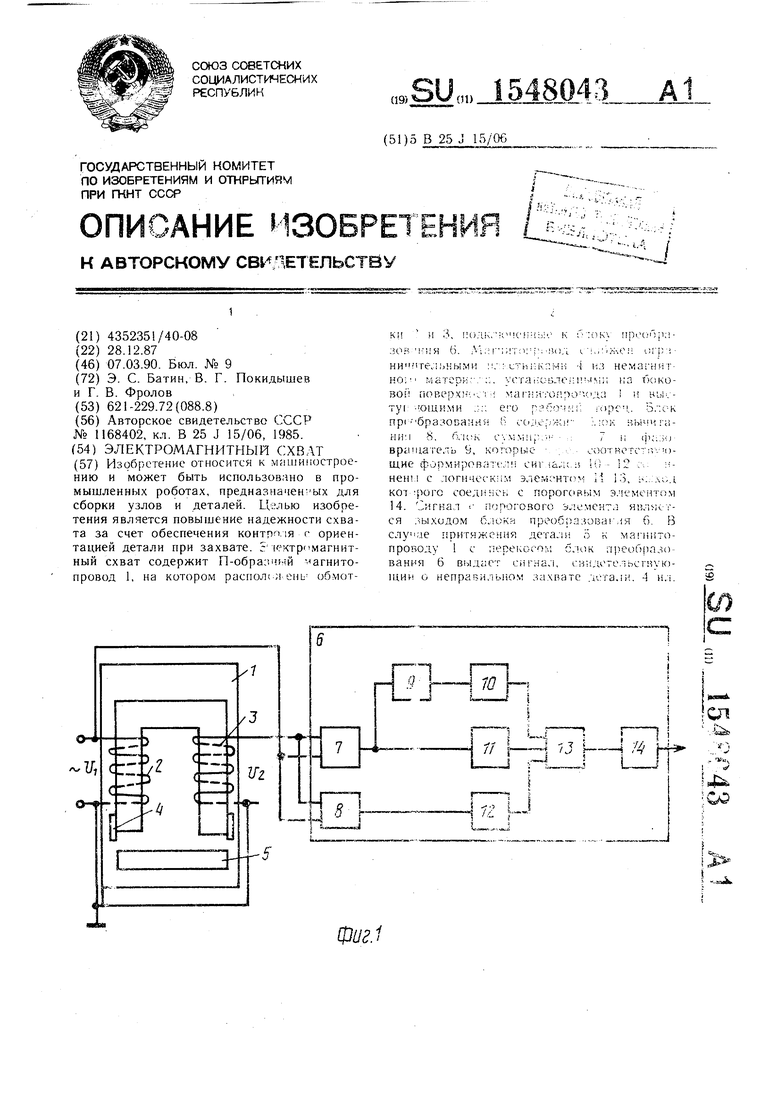
Фиг. 2
foe.3
фиг.4
| Электромагнитный схват | 1983 |
|
SU1168402A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
