Изобретение относится к цифровым следящим системам с бесконтактными двигателями постоянного тока и может быть использовано в манипуляционных роботах и других устройствах автоматики в качестве исполнительной следящей системы.
Целью изобретения является упрощение цифровой следящей системы.
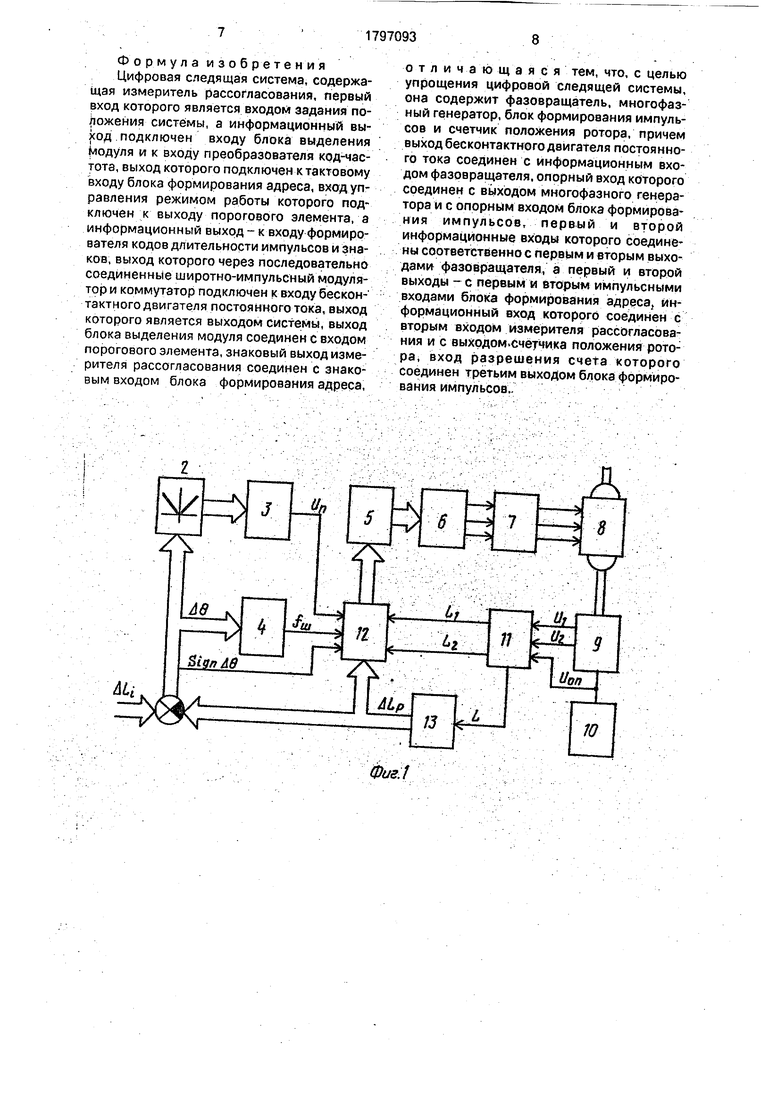
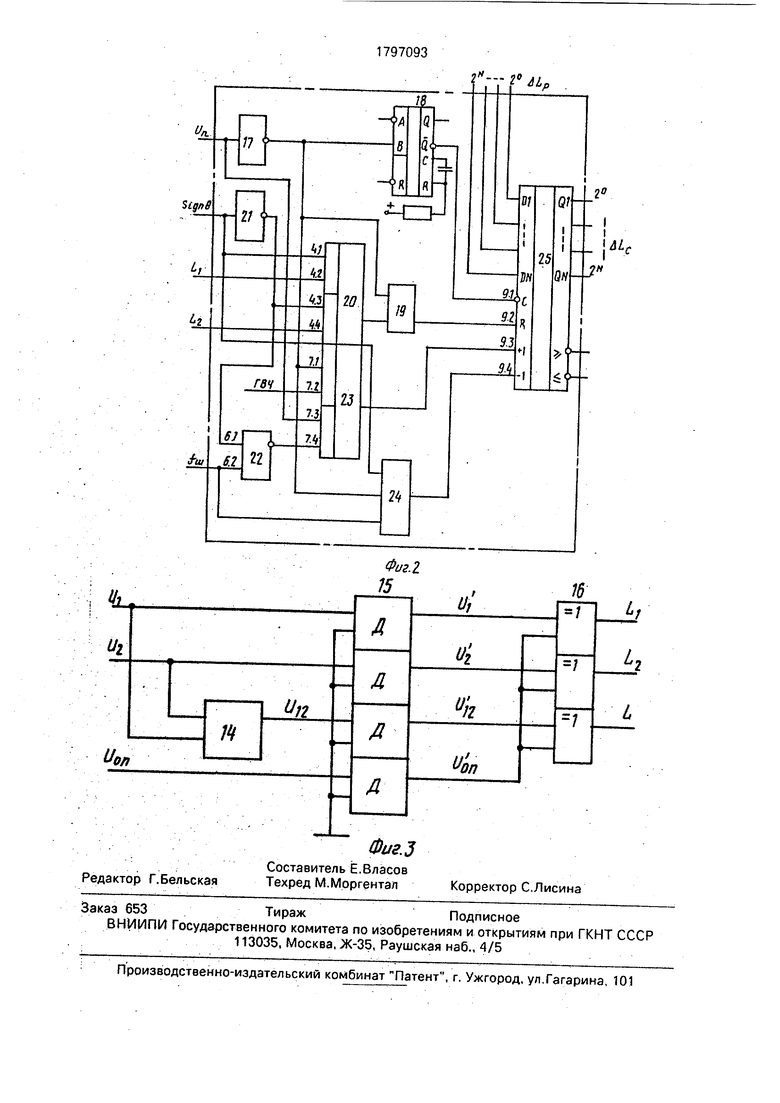
На фиг. 1 представлена блок-схема заявляемой следящей системы; на фиг.2 - блок формирования адреса статора; на фиг. 3 - блок формирования импульсов.
Система содержит измеритель рассогласования 1, блок выделения модуля (БВМ) 2, пороговый элемент (ПЭ) 3, преобразователь код-частота (ПКЧ) 4, формирователь кодов длительности импульсов и знаков 5, широтно-импульсный модулятор (ШИМ) 6, коммутатор (ЛПК) 7, бесконтактный двигатель постоянного тока (БДПТ) 8, фазовращатель (ФВ) 9. многофазный генератор (МФГ) 10, блок формирования импульсов (БФИ) 11, блок формирования адреса статора (БФАС) 12, счетчик положения ротора (СПР) 13, сумxj
О М
О Ю СО
матор 14, блок детекторов пересечения сигналом нулевого уровня 15, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 16, инвертор 17, одновибратор 18, элемент И 19, элемент 2И-ИЛИ 20. инвертор 21, элемент ИЛИ 22, элемент 2И-ИЛИ 23, элемент ИЛИ 24, счетчик 25.
В описании приняты следующие условные обозначения: Ди - код входного угла. ДО, I ДО i - код и модуль кода ошибки системы, sign ДО - знаковый разряд кода рассогласования (ошибки), On - выходной сигнал порогового элемента, Дип - код срабатывания порогового элемента, тш - частота импульсов на выходе преобразователя код-частота импульсов, Ui, U2 - выходные сигналы фазовращзтеля, Р - число пар полюсов ротора. Li, 1-2 - последовательности импульсов с длительностью, равной фазовому сдвигу сигналов Ui и U2 относительно опорного Uon - опорный сигнал ФВ, р - фазовый сдвиг выходного сигнала относительно опорного, L - последовательность импульсов с длительностью, равной сумме фазовых сдвигов сигналов Ui и U2 относительно опорного, f0 - частота на выходе генератора высокой частоты, а - угол поворота ротора, m - число фаз электрической машины..
В системе в качестве датчика положения ротора использован фазовращатель, причем его выходные сигналы Ui и U2 сдвинуты по фазе друг относительно друга на 180 эл.град., т.е.
Ui As-in(wt+ tp +v);
1)2 Asin(Wt+ p-ip); где 90 эл.град лг/2Р
Р - число пар полюсов ротора электродвигателя,- .
р - фазовый сдвиг выходного сигнала относительно опорного.
Блок формирования импульсов 11 предназначен для выделения фазового сдвига сигналов Ui. Ua и Ui2 Ui + Ua относительно опорного Uon в виде длительности импульсов последовательностей Li, L.2 и L соответственно. Детекторы пересечения сигналом нулевого уровня преобразуют гармонические сигналы Ui, U2. U12, Uon в последовательности прямоугольных импульсов. Фазовый сдвиг сигналов Ui, U2, Ui2 относительно опорного Uon выдяляётся в виде длительности импульсов Li, , L элементами. ИСКЛЮЧАЮЩЕЕ ИЛИ 16.
Блок формирования адреса статора 12 предназначен для формирования кода углового положения поля статора электродвигателя. Ключи, реализованные на логических элементах, коммутируют входные сигналы
блока 12 таким образом, что при больших рассогласованиях I Д0| Дип на выходе счетчика имеет место Код, отличающийся от кода углового положения ротора на ±90
эл.град (знак + или - определяется в зависимости от sign Дф, При малых рассогласованиях в счетчик 25 заносится код углового положения ротора электродвигателя 4JLp и дальнейшее изменение выходного сигнала 12 Ди происходит при помощи выходного сигнала ПКЧ 4 пропорционально рассогласованию системы.
Таким образом, задавая в зависимости от величины рассогласования при помощи
БФАС12 угловое положение магнитного поля статора, реализуются два режима работы электродвигателя цифровой следящей системы: при больших рассогласованиях I Д# I Дрп поля ротора и статора электродвигателя разнесены на 90 эд.град, т.е. реализован режим БДПТ 8с релейным регулятором. При малых рассогласованиях I Д# | Дип поля ротора и статора пространственно совмещены и изменение угло- вого положения поля статора происходит пропорционально рассогласованию, т.е. реализован дискретно-шаговый режим работы электродвигателя.
Для обеспечения указанных режимов
работы системы коммутацию тактовых входов счетчика 25 необходимо проводить согласно следующим логическим выражениям: .
ВХОД +1 foUn + Un(fuj + S)
вход -1 - Un + fu, + S (2)
При этом предполагаются следующие значения переменных Un и S:
Un
g
f 0, если | Д0| Дип 1,если I Д0| Дип Г1, если sign Д0Х) 0. если sign
Логическая функция, реализуемая на входе обнуления счетчика 25, имеет вид R Un(S Li + S La) (3) Счетчик положения ротора 13 предназначен для формирования кода углового положения ротора путем подсчета импульсов с генератора высокой частоты (на фигурах не показан) за время прохождения импульсов последовательности L, длительность которых пропорциональна фазовому сдвигу (р сигнала Ui2 относительно Uon, а следовательно, пропорциональна углу поворота ротора а.
Формирователь 5 может быть выполнен на постоянном запоминающем устройстве (ПЗУ);
Цифровая следящая система работает следующим образом. При подаче на вход системы большого скачкообразного сигнала код модуля сигнала ошибки А# I превышает код срабатывания ПЭ 3,на выходе которого устанавливается низкий уровень сигнала Un, соответствующий логическому О. Логические схемы БФАС 12 коммутируют входы счетчика 25 согласно выражениям (1-3) и на выхода БФАС 12 будет иметь место код ДЦ, отличающийся на 90 эл.град. от кода ALp. Выходной код БФАС 12 посту- пает на адресные входы формирователя 5, в котором записаны коды ширины импульсов и знаки m функций (например гармонических), сдвинутых на угол в 2л:/т радиан, которые поступают на входы ШИМ 6, где преобразуются в широтно-импульсно модулированные последовательности. На вычитающие входы широтно-импульсных модуляторов блока 6 подключен выход генератора (на фигурах не показан), который.за- дает постоянную глубину модуляции. Выходные:сигналы ШИМ 6через ППК7 подаются на обмотки БДПТ 8.
Фазовращатель 9 жестко закреплен на валу БДПТ и запитывается многофазным напряжением от МФГ 10. Выходные сигналы ФВ 9 Ut и Da преобразуются блоком формирования импульсов 11 в последовательности импульсов Ц, 2, L Выходные сигналы БФИ 11 Li и L2 поступают на входы БФАС 12, где используются для формирования кода углового положения- поля статора . ДЦ. Сигнал L поступает на вход СПР 13, где формируется код углового положения рото- pa ALp, который поступает на измеритель рассогласования 1,
Магнитное поле статора электродвигателя, благодаря жесткой связи по угловому положению с ротором через ФВ 9 и БФИ 11, вращается синхронно с ротором, его угол с полем последнего составляет 90 эд.град., а его модуль имеет максимальное значение. Поэтому двигатель, вращаясь как бесконтактный двигатель постоянного тока с релейным управлением, отрабатывает рассогласование.
С уменьшением модуля сигнала ошибки I Д# I до значения, равного коду срабатывания порогового элемента, последний сра
батывает, т.е. устанавливается высокий уровень сигнала Un, соответствующий логической 1. Логические схемы БФАС 12 коммутируют входы счетчика 25 согласно выражениям (1-3), при этом по фронту сигнала Un через установочные входы в счетчик 25 заносится код углового положения ротора ALp, таким образом пространственно совмещаются поля ротора и статора (т.е. система переводится в дискретно-шаговый режим). В зависимости от знака рассогласования signA$выход ПКЧ 4 подключается к одному из тактовых входов счетчика 24 и дальнейшее перемещение поля статора осуществляется по выходному сигналу ПКЧ тш, т.е. двигатель отрабатывает рассогласование как шаговый. Этот режим характеризуется тем, что магнитное поле статора электродвигателя перемещается в пространстве дискретно на один шаг с приходом каждого нового импульса от ПКЧ и на тактовый вход БФАС 12.
Как только код модуля сигнала ошибки I Д#1 0, импульсы на выходе ПКЧ 4 исчезают, выходной код U БФАС 12 остается постоянным и ШИМ 6 генерирует импульсы, длительность которых постоянна во времени. Поле статора БДПТ 8 неподвижно, максимально по величине и угол поворота его относительно поля ротора равен
ан a resin
Мн
Мо
где Мо - максимальный синхронизирующий момент электродвигателя,
Мн - момент нагрузки на валу двигателя.
Таким образом, в режиме покоя БДПТ 8 развивает синхронизирующий момент, полностью компенсирующий момент нагрузки на валу двигателя при нулевом рассогласовании, т.е. цифровая следящая система обладает астатизмом по отношению к моментным возмущениям.
В цифровой следящей системе при включении не требуется режим калибровки.
Цифровая следящая система наиболее эффективно может быть использована в мэ- нипуляционных роботах, где требуется высокое быстродействие, недопустимы перерегулирования, а нагрузочный момент на валу электродвигателя изменяется в широких пределах.
Формула и з о б ре т е ни я Цифровая следящая система, содержащая измеритель рассогласования, первый вход которого является входом задания по- йожения системы, а информационный выход подключен входу блока выделения модуля и к входу преобразователя код-частота, выход которого подключен к тактовому входу блока формирования адреса, вход управления режимом работы которого подключен к выходу порогового элемента, а информационный выход-к входу формирователя кодов длительности импульсов и знаков, выход которого через последовательно соединенные широтно-импульсный модулятор и коммутатор подключен к входу бесконтактного двигателя постоянного тока, выход которого является выходом системы, выход блока выделения модуля соединен с входом порогового элемента, знаковый выход измерителя рассогласования соединен с знаковым входом блока формирования адреса,
о т л и ч а ю щ а я с я тем, что, с целью упрощения цифровой следящей системы, она содержит фазовращатель, многофазный генератор, блок формирования импульсов и счетчик положения ротора, причем выход бесконтактного двигателя постоянного тока соединен с информационным входом фазовращателя. опорный вход которого соединен с выходом многофазного генератора и с опорным входом блока формирова- ния импульсов, первый и второй информационные входы которого соединены соответственно с первым и вторым выходами фазовращателя, а первый и второй выходы - с первым и вторым импульсными входами блока формирования адреса, информационный вход которого соединен с вторым входом измерителя рассогласования и с выхрдом.счётчика положения ротора, вход разрешения счета которого соединен третьим выходом блока формирования импульсов..
jH o
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
| Серводин | 1986 |
|
SU1667000A1 |
| Датчик положения ротора вентильного двигателя | 1978 |
|
SU748701A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2006 |
|
RU2331963C1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2017 |
|
RU2658678C1 |
| БЕСКОНТАКТНЫЙ НИЗКОСКОРОСТНОЙ ВЫСОКОМОМЕНТНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1994 |
|
RU2071630C1 |
| Следящая система | 1981 |
|
SU999016A1 |
| Способ настройки высокомоментного бесконтактного двигателя постоянного тока | 1991 |
|
SU1804684A3 |
Изобретение относится к цифровым следящим системам с бесконтактными двигателями постоянного тока и может быть использовано в манипуляционных роботах и других устройствах автоматики в качестве исполнительной следящей системы. Целью изобретения является упрощение цифровой следящей системы. В системе в качестве датчика положения ротора использован двухфазный фазовращатель. Раздельно формируются код углового положения ротора и код углового положения статора электродвигателя, причем последний изменяется . при переходе из непрерывного режима работы системы в дискретно-шаговый при помощи логических устройств. При больших рассогласованиях исполнительный электропривод работает как бесконтактный двига- тель постоянного тока с релейным регулятором, а начиная с момента времени, когда ошибка системы уменьшается до определенного значения, исполнительный электропривод переводится в режим шагового двигателя. Система содержит измеритель рассогласования 1, блок выделения модуля 2, пороговый элемент 3, преобразователь код-частота 4, формирователь кодов длительности импульсов и знаков 5, широтно- импульсный модулятор б, коммутатор 7, бесконтактный двигатель постоянного тока 8, фазовращатель 9, многофазный генератор 10, блок формирования импульсов 11, блок формирования адреса статора 12, счетчик положения ротора 13. 3 ил. ел с
Редактор Г.Бельская
Составитель Ё.Власов Техред М.Моргентал
h Ь
L
Фиг.З
Корректор С.Лисина
| Серводин | 1986 |
|
SU1667000A1 |
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
