Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам для автоматизации основ ных и вспомогательных операций, и может быть использовано для распознавания и захвата роботом ферромагнитных деталей. Целью изобретения является обеспечение надежности захвата за счет определения наличия ферромагнитной детали под каждым концом магнитопровода электромагнита. На фиг. 1 изображен электромагнитный схват, общий вид; на фиг. 2 - его функциональная схема. Электромагнитный схват содержит магнитопровод 1 П-образной формы, на котором расположена обмотка 2, подключенная через коммутатор 3 к источнику 4 постоянного тока. На концах магнитопровода 1 расположены баллоны 5 из эластичного материала, заполненные сыпучим магнитным материалом. Кроме того, схват содержит два датчика 6 наличия детали, каждый из которых выполнен в виде высокочастотного генератора с обмоткой 7 колебательного контура, расположенной на магнитопроводе 1 над эластичными баллонами 5, два формирователя 8 сигнала, подключенных к выходам датчиков 6, и логический элемент ИЛИ-НЕ 9, к входам которого подключены формирователи 8 сигнала, а выход соединен с коммутатором 3. Захватываемая деталь обозначена позицией 10. Электромагнитный схват работает следующим образом. В исходном состоянии источник 4 постоянного тока отключен. При отсутствии детали в зоне схвата, т.е. вблизи баллонов 5, оба генератора датчиков 6 работают в режиме автоколебаний и обмотки 7 питаются слабым высокочастотным током. Синусоидальные сигналы с генераторов подаются на формирователи 8, где они детектируются и на выходе формирователей имеется единичный сигнал. Поэтому на выходе логического элемента ИЛИ-НЕ 9 имеется сигнал нулевого уровня, который блокирует работу коммутатора 3 и выход источника 4 постоянного тока отключен от обмотки 2 постоянного тока. При нахождении какой-либо ферромагнитной детали 10 под баллонами 5 происходит срыв колебаний одного из генераторов или обоих вместе. Когда деталь 10 находится под одним баллоном 5, происходит срыв колебаний генератора, обмотка 7 которого расположена под этим баллоном и на выходе одного из формирователей 8 имеется нулевой сигнал, который поступает на устройство сигнализации или вход системы управления манипулятора (не показаны). Так как схват ориентирован относительно детали 10 неточно, то система управления выдает исполнительным приводам манипулятора команду на коррекцию положения схвата до тех пор, пока одновременно не сорвутся колебания генераторов обоих датчиков 6, т.е. деталь 10 будет находиться под баллонами 5, при этом на выходе формирователей 8 будут присутствовать нулевые сигналы, а на выходе элемента ИЛИНЕ 9 будет единичный сигнал, по которому выход источника 4 постоянного тока ком.мутатором 3 подключается к обмотке 2. При это.м магнитный контур, образованный магнитопроводом 1 с баллонами 5, работает как постоянный электромагнит, происходит притягивание детали 10 и она захватывается. Так как баллоны 5 выполнены из эластичного материала и заполнены сыпучим магнитным веществом, то происходит плотное прилегание баллонов 5 к поверхности детали 10. При отпускании захваченной детали 10 источник 4 постоянного тока отключается и под собственным весом деталь 10 опускается на заданную позицию.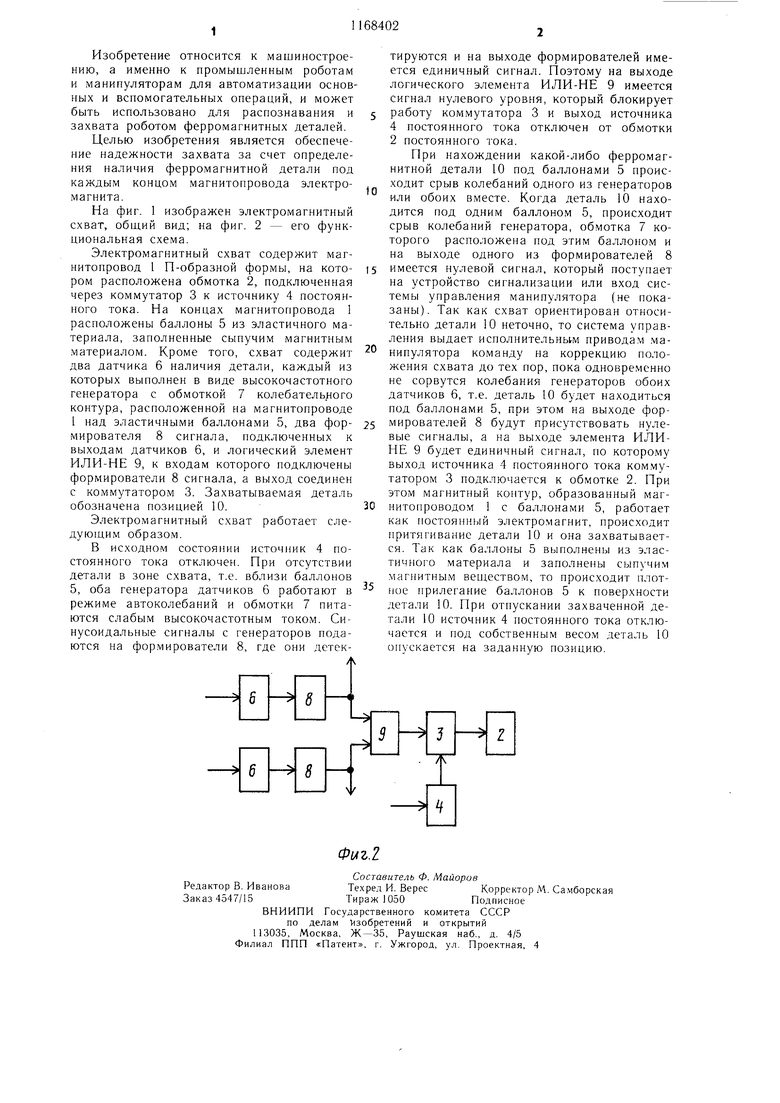
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1984 |
|
SU1271743A2 |
| Схват манипулятора | 1986 |
|
SU1364471A2 |
| Схват манипулятора | 1991 |
|
SU1811479A3 |
| Схват | 1985 |
|
SU1311928A1 |
| Электромагнитный захват | 1982 |
|
SU1074800A1 |
| Стыковочное устройство руки промышленного робота | 1990 |
|
SU1815216A1 |
| Губка схвата | 1990 |
|
SU1815212A1 |
| Манипулятор для захвата ферромагнитных деталей с ферромагнитных поверхностей | 1976 |
|
SU649566A1 |
| Схват промышленного робота В.Г.Вохмянина | 1990 |
|
SU1756144A1 |
| Электромагнитное захватное устройство | 1990 |
|
SU1745541A1 |
ЭЛЕКТРОМАГНИТНЫЙ СХВАТ, содержащий магнитопровод П-образной формы, на котором расположена обмотка, подключенная через коммутатор к источнику постоянного тока, и баллоны из эластичного материала, заполненные сыпучим магнитным материалом и расположенные на концах магнитопровода, отличающийся тем, что, с целью обеспечения надежности захвата, он снабжен двумя датчиками наличия детали, каждый из которых выполнен в виде высокочастотного генератора с об-, моткой колебательного контура, расположенной на П-образном магнитопроводе над эластичным баллоном, двумя формирователями сигнала и логическим элементом ИЛИНЕ, при этом выходы датчиков через формирователи сигналов подключены к входам логического элемента ИЛИ-НЕ, выход которого соединен с коммутатором. О5 оо 4 О IND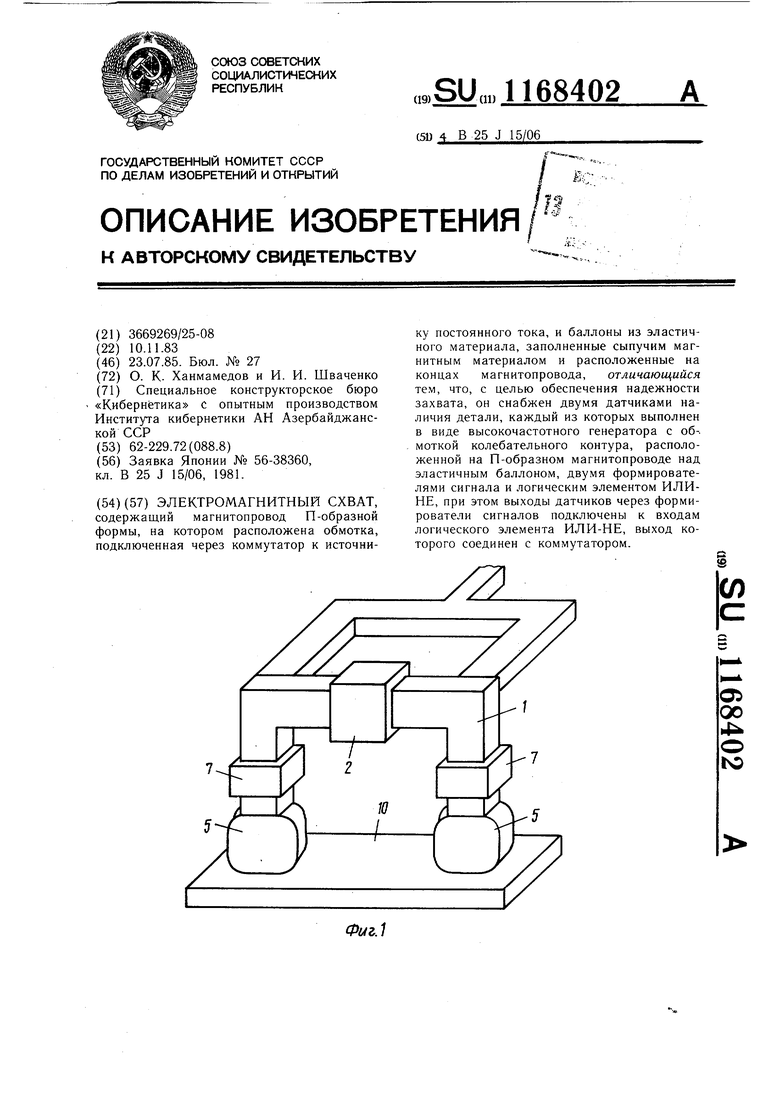
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
