Изобретение относится к машиностроению и может быть использовано в зубчатых редукторах с переменным расоложением осей колес.
Целью изобретения является расши- 25 рение кинематических возможностей редуктора путем оасширения диапазона изменения передаточного отношения и повышения нагрузочной способности.
30
На фиг. 1 показана схема зубчатого редуктора; на фиг. 2 - разрез А-А на фиг. 1 (шестерня передачи находится в промежуточном положении); на
фиг. 3 - тороидная делительная поверхность зубчатого колеса.
0
5
Зубчатый редуктор содержит корпус 1, круглые зубчатые шестерню 2 и колесо 3, делительные поверхности которых выполнены в виде торов с различными радиусами. Радиусы образующих кругов делительных торовых поверхностей шестерни 2 и колеса 3 равны соответственно т1 и г. Расстояния от центров образующих кругов торов шестерни 2 и колеса 3 до осей 010 и 020а их вращения равны соответственно R, и Кг.
Профили зубьев шестерни 2 и колеса 3 являются взаимоогибаемыми. Продольные линии зубьев выполнены с постоянным нормальным шагом по зависимости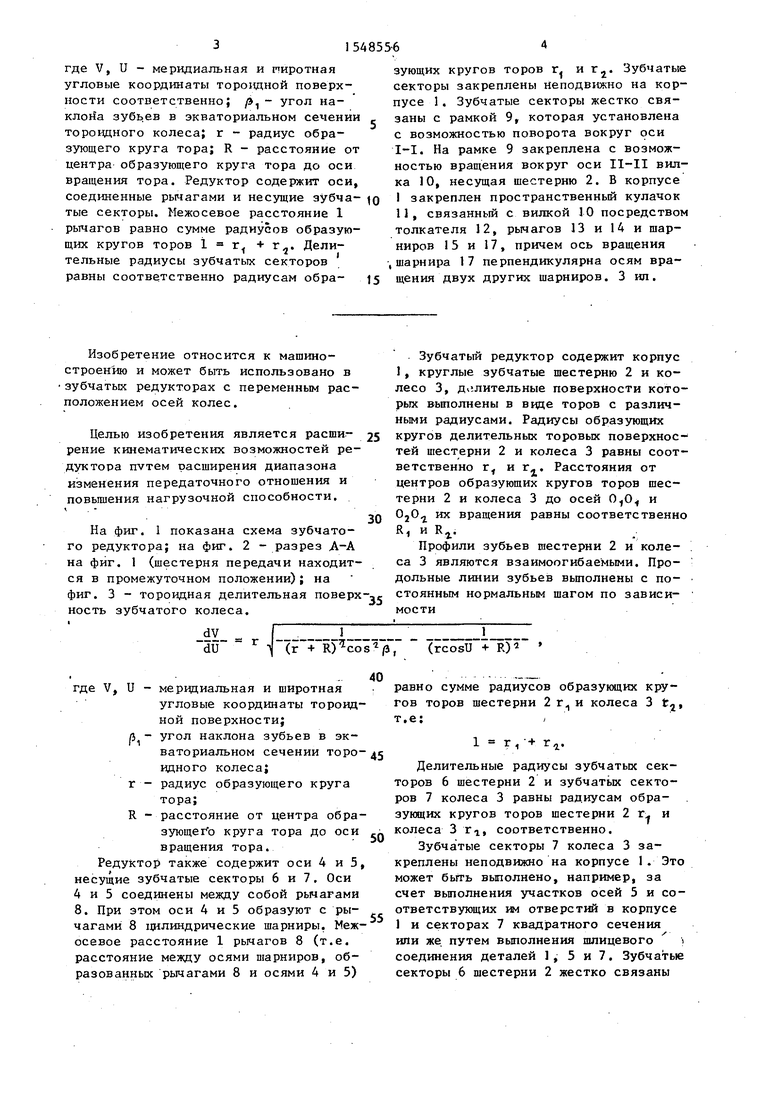
| название | год | авторы | номер документа |
|---|---|---|---|
| Зубчатая передача | 1988 |
|
SU1551890A1 |
| Зубчатая передача | 1984 |
|
SU1240977A1 |
| Способ обработки пространственных зубчатых колес | 1982 |
|
SU1168360A1 |
| Зубчатая передача | 2024 |
|
RU2831817C1 |
| Зубчатый редуктор | 1988 |
|
SU1551891A1 |
| Машина трения | 1989 |
|
SU1714456A1 |
| Способ нарезания сферических зубчатых колес | 1989 |
|
SU1636144A1 |
| Способ отделочной обработки зубчатых элементов муфты с пространственно модифицированными зубьями | 1987 |
|
SU1511025A1 |
| Червячная передача | 1988 |
|
SU1627777A1 |
| МЕХАНИЗМ ДЕЛЕНИЯ | 1971 |
|
SU319421A1 |
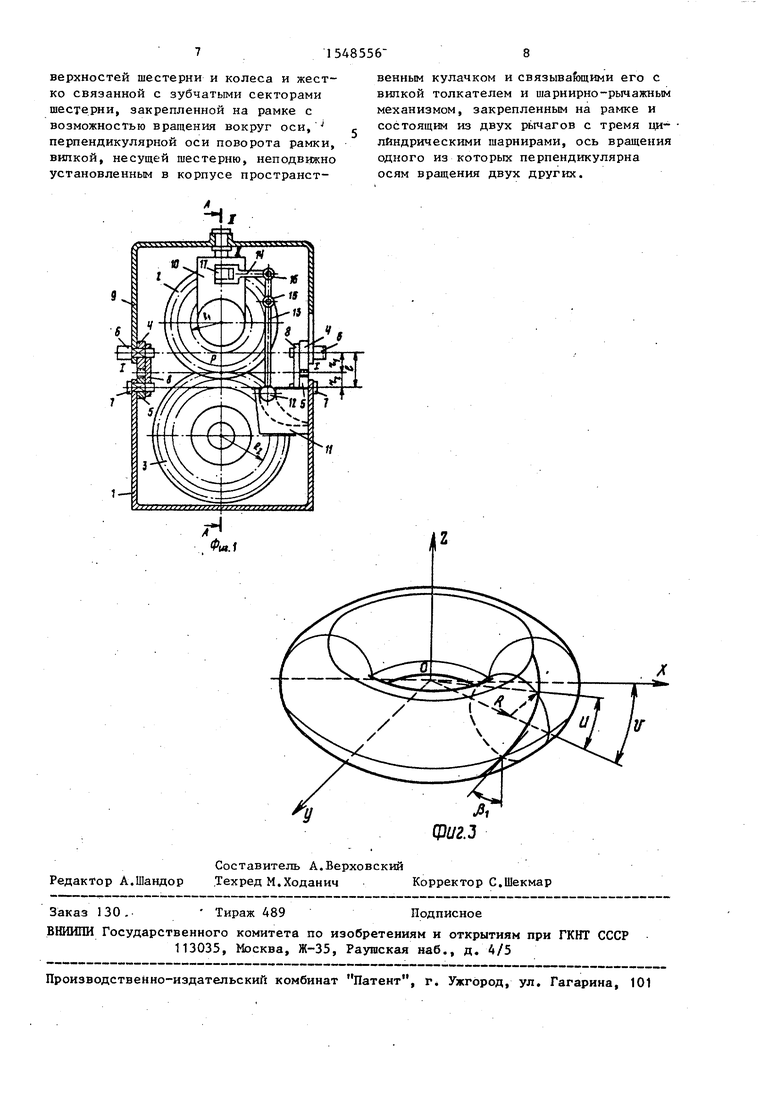
Изобретение относится к машиностроению и может быть использовано в зубчатых редукторах с переменным расположением осей колес. Целью изобретения является расширение кинематических возможностей редуктора путем расширения диапазона изменения передаточного отношения и повышения нагрузочной способности. В редукторе имеется корпус 1, круглые зубчатые шестерня 2 и колесо 3, делительные поверхности которых выполнены в виде торов. Продольные линии зубьев выполнены с постоянным нормальным шагом по зависимости DV/DU=R√1/(R+R)2.COS2β1-1/(RCOSU+R)2, где V,U - меридиальная и широтная угловые координаты тороидной поверхности соответственно
β1 - угол наклона зубьев в экваториальном сечении тороидного колеса
R - радиус образующего круга тора
R - расстояние от центра образующего круга тора до оси вращения тора. Редуктор содержит оси, соединенные рычагами и несущие зубчатые секторы. Межосевое расстояние L рычагов равно сумме радиусов образующих кругов торов L=R1+R2. Делительные радиусы зубчатых секторов равны соответственно радиусам образующих кругов торов R1 и R2. Зубчатые секторы закреплены неподвижно на корпусе 1. Зубчатые секторы жестко связаны с рамкой 9, которая установлена с возможностью поворота вокруг оси I-I. На рамке 9 закреплена с возможностью вращения вокруг оси II-II вилка 10, несущая шестерню 2. В корпусе 1 закреплен пространственный кулачок 11, связанный с вилкой 10 посредством толкателя 12, рычагов 13 и 14 и шарниров 15 и 17, причем ось вращения шарнира 17 перпендикулярна осям вращения двух других шарниров. 3 ил.
1 (
1
1
R) со s, (rcosU R)
40
r R где V, U - мервдиальная и широтная
угловые координаты тороидной поверхности; А - угол наклона зубьев в экваториальном сечении торо- 45 идного колеса; радиус образующего круга тора;
расстояние от центра обра- зующегЪ круга тора до оси вращения тора.
Редуктор также содержит оси 4 и 5, несущие зубчатые секторы 6 и 7. Оси 4 и 5 соединены между собой рычагами 8. При этом оси 4 и 5 образуют с рычагами 8 цилиндрические шарниры. Межосевое расстояние 1 рычагов 8 (т.е. расстояние между осями шарниров, образованных рычагами 8 и осями 4 и 5)
50
55
1
равно сумме радиусов образующих кругов торов шестерни 2 г1 и колеса 3 t, т.е:/
1 - г, + г4.
Делительные радиусы зубчатых секторов 6 шестерни 2 и зубчатых секторов 7 колеса 3 равны радиусам образующих кругов торов шестерни 2 г- и колеса 3 rlt соответственно.
Зубчатые секторы 7 колеса 3 закреплены неподвижно на корпусе 1 . Это может быть выполнено, например, за счет выполнения участков осей 5 и соответствующих им отверстий в корпусе 1 и секторах 7 квадратного сечения или же путем выполнения шлицевого i соединения деталей 1, 5 и 7. Зубчатые секторы 6 шестерни 2 жестко связаны
рамкой 9. Это может быть выполнено, например, за счет выполнения участков осей и соответствующих им отверстий в рамке 9 и секторах 6 квадратного сечения или же путем выполнения шлицевого соединения деталей 6, 4 и 9. Рамка 9 установлена с возможностью поворота вокруг оси I-I, проходящей через точку Р контакта делительных поверхностей шестерни 2 и колеса 3. На рамке 9 закреплена с возможностью вращения вокруг оси II-II, перпендикулярной оси I-I поворота рамки
9, вилка 10, несущая шестерню 2. Шее-15 ниры 15 - 17. Благодаря этому, а тактерня 2 в вилке 10 может вращаться вокруг оси вращения шестерни 2.
В корпусе 1 закреплен пространственный кулачок 11, который связан с вилкой 10 посредством толкателя 12 и шарнирно-рычажного механизма, закрепленного на рамке 9. Шарнирно-рычажный механизм состоит из двух рычагов 13 и 14 и трех цилиндрических шарниров 15 - 17, причем ось вращения шарнира 17 перпендикулярна осям вращения шарниров 15 и 16, X, У, Z - оси координат.
Зубчатый редуктор работает следующим образом.
Вращение от шестерни 2 к колесу 3 или наоборот осуществляется в результате контактирования (зацепления) рабочих поверхностей зубьев, являющихже соответственно подобранным длинам рычагов 13 и 14 и профиля кулачка 11 происходит доворот шестерни 2 вокруг оси II-II на угол, необходимый для
20 непрерывности продольного зацепления равноудаленных линий зубьев. Величина угла доворота шестерни 2 вокруг оси II-II равна разности углов наклона линий зубьев шестерни 2 и колеса
25 3 в точке Р контакта делительных поверхностей гестерни 2 и колеса 3.
Формула изобретения
Зубчатьй редуктор, содержащий кор- 30 пус, круглые зубчатые шестерню и колесо с тороидальными делительными поверхностями, зубчатые секторы шестерни и колеса, установленные на корпусе, рычаги, делительные (.радиусы зубчатых секторов
ся сопряженными. Сопряжение обеспечи- равны соответствующим радиусам обра- вается благодаря выбору взаимоогибае- зующих кругов торов шестерни и колеса,
а межосевое расстояние рычагов равно сумме радиусов образующих кругов торов, отличающийся
тем.
мых зубьев и выполнению условий зацепления.
При необходимости изменения относительного положения осей 0,0 и Ofl 40 что, с целью расширения кинематичес- шестерни 2 и колеса 3 в пространствеких возможностей редуктора путем расповорачивают рамку 9, например, вращая оси 4. При этом сектор 6 обкатывается по неподвижному сектору 7, который неподвижен, так как закреплен 45 на корпусе 1, т.е. рамка 9 совершает
ширения диапазона изменения передаточного отношения и повышения нагрузочной способности, продольные линии зубьев шестерни и колеса выполнены с постоянным нормальным шагом по зависимости
вместе с секторами 7 вращательное
4
1
1
Tr R)cos1/, (rcosU + R)
V, U - мерадиальная и широтная
угловые координаты тороид- ной поверхности;
г - радиус образующего круга -, тора;
R - расстояние от центра образующего круга тора до оси вращения тора;
движение вокруг оси 1-1, которая перемещается вместе с точкой Р контакта по делительной поверхности колеса 3. В целом данная конструкция аналогична планетарному механизму с остановленной солнечной шестерней (сектор 7) .Сектор 6 выполняет роль сател- лита, а рычаг 8 - водила.
При этом также происходит взаимодействие вилки 10 с пространственным кулачком 11 через шарнирно-рычажный механизм, т.е. через толкатель 12, рычаги 13 и 14 и цилиндрические шарже соответственно подобранным длинам рычагов 13 и 14 и профиля кулачка 11 происходит доворот шестерни 2 вокруг оси II-II на угол, необходимый для
непрерывности продольного зацепления равноудаленных линий зубьев. Величина угла доворота шестерни 2 вокруг оси II-II равна разности углов наклона линий зубьев шестерни 2 и колеса
3 в точке Р контакта делительных поверхностей гестерни 2 и колеса 3.
Формула изобретения
Зубчатьй редуктор, содержащий кор- пус, круглые зубчатые шестерню и колесо с тороидальными делительными поверхностями, зубчатые секторы шестерни и колеса, установленные на корпусе, рычаги, делительные (.радиусы зубчатых секторов
ров, отличающийся
тем.
что, с целью расширения кинематичес ких возможностей редуктора путем ра
ширения диапазона изменения передаточного отношения и повышения нагрузочной способности, продольные линии зубьев шестерни и колеса выполнены с постоянным нормальным шагом по зависимости
1
1
/5, угол наклона зубьев в экваториальном сечении торо- идного колеса,
редуктор снабжен огибающей шестерню рамкой, установленной с возможностью поворота вокруг оси, проходящей через Точку контакта делительных поверхностей шестерни и колеса и жестко связанной с зубчатыми секторами шестерни, закрепленной на рамке с возможностью вращения вокруг оси, 4 перпендикулярной оси поворота рамки, вилкой, несущей шестерню, неподвижно установленным в корпусе пространственным кулачком и связывающими его с вилкой толкателем и шарнирно-рычажным механизмом, закрепленным на рамке и состоящим из двух рычагов с тремя цилиндрическими шарнирами, ось вращения одного из которых перпендикулярна осям вращения двух других.
