Изобретение относится к кинотехнике, а в частности к тренажерам для обучения кинооператора.
Известно устройство по патенту США N 3798795, опубл. 1974 г., кл. F 41 G 3/26, которое содержит блок, ориентируемый оператором, снабженный визиром и датчиками ориентации, блок определения угловых координат объекта, установленный в кардановом подвесе, снабженном двумя датчиками угла на осях внутренней и внешней рам, вычислительный блок, определяющий соответствие ориентации блока, ориентируемого по углу оператором, угловым координатам объекта, причем датчики ориентации и датчики угла связаны с вычислительным блоком. Это устройство выбрано в качестве прототипа.
Недостатками прототипа являются: невозможность имитации движения тест-объекта; неавтономность использования.
Целями предлагаемого изобретения являются: расширение функциональных возможностей устройства путем использования его для обучения кинооператора; повышение точности устройства путем введения количественной оценки его работы; повышение экономической эффективности эксплуатации устройства путем исключения использования кинопленки в процессе обучения кинооператора.
Указанные цели достигаются тем, что источник светового потока с оптической системой укреплен на внутренней рамке карданова подвеса, в блок имитации движения введен второй датчик угла, первые и вторые аналого-цифровые и цифро-аналоговые преобразователи, в узел измерительных датчиков введен второй датчик угловой скорости, а сам узел укреплен на кинокамере, усилительно-преобразующий блок выполнен в виде электронной вычислительной машины и кроме того в состав устройства введен экран; узел измерительных датчиков содержит датчик угловой скорости и акселерометр; узел измерительных датчиков выполнен в виде карданова подвеса, третьего и четвертого датчиков угла и штатива; в узел измерительных датчиков введены первый и второй акселерометры; в узел измерительных датчиков введен фотоприемный элемент; в узел измерительных датчиков введена фотоприемная матрица.
Заявителю не известны технические решения, позволяющие повысить точность работы устройства и расширить его функциональные возможности, эквивалентные отмеченным. Таким образом, указанные отличительные признаки придают, по мнению заявителя, заявленному устройству существенные отличия.
В качестве известного технического решения, в котором решается задача, сходная с одной из задач предлагаемого изобретения, укажем на [2].
В этом авторском свидетельстве описано устройство, позволяющее повысить экономичность проверки киноаппаратуры путем изготовления специальной тест-пленки. Это позволяет исключить из процесса проверки киносъемочной аппаратуры такие трудоемкие операции, как съемка тест-объекта и обработка экспонированной пленки.
На фиг. 1 представлена общая схема тренажера, вид спереди; на фиг.2 - общая схема тренажера, вид сверху; на фиг.3 - схема блока имитации движения тест-объекта и цепей формирования сигналов; на фиг.4 - первый вариант реализации тренажера, в котором узел измерительных датчиков выполнен на двух датчиках угловой скорости; на фиг.5 - второй вариант реализации тренажера, в котором узел измерительных датчиков выполнен на одном датчике угловой скорости и одном акселерометре; на фиг.6 - третий вариант реализации тренажера, в котором узел измерительных датчиков выполнен в виде карданова подвеса, двух датчиков угла и штатива; на фиг.7 - четвертый вариант реализации тренажера, в котором в узел измерительных датчиков введены два акселерометра; на фиг. 8 - пятый вариант реализации тренажера, в котором в узел измерительных датчиков введен фотоприемный элемент; на фиг.9 - шестой вариант реализации тренажера, в котором в узел измерительных датчиков введена фотоприемная матрица.
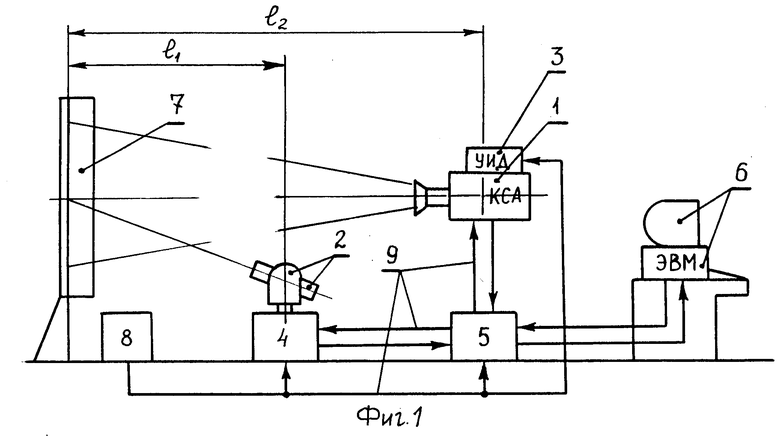
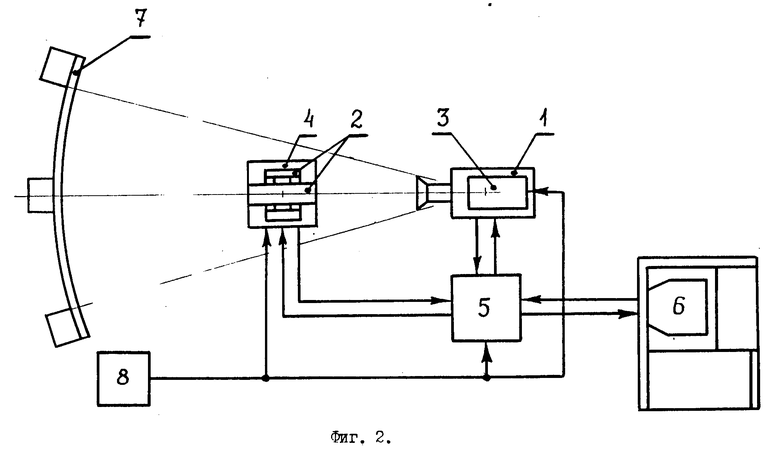
Устройство состоит (см. фиг.1 и 2) из модели 1 киносъемочного аппарата (далее называемой камерой), блока 2 имитации движения тест-объекта, укрепленного на кинокамере 1 узла измерительных датчиков 3, блоков электроники 4 и 5, электронной вычислительной машины 6, экрана 7, блока питания 8 и линий связи 9.
Блок 2 имитации движения тест-объекта располагается на расстоянии l1 от экрана, а киноаппарат 1 на расстоянии l2 от экрана.
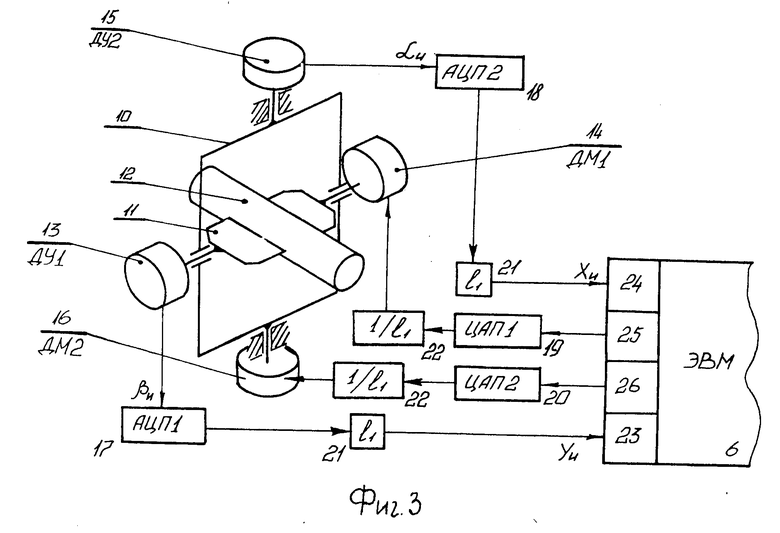
Блок имитации движения тест-объекта состоит (см. фиг.3) из внешней 10 и внутренней 11 рам карданова подвеса и источника светового потока 12 с оптической системой, укрепленного на внутренней раме карданова подвеса. В качестве источника светового потока с оптической системой возможно использовать как лазер, так и технический источник сфокусированного светового потока.
По оси внутренней рамы 11 карданова подвеса расположены первый датчик угла 13 и первый датчик момента 14. По оси внешней рамы 10 карданова подвеса расположены второй датчик угла 15 и второй датчик момента 16.
Блок 2 имитации движения тест-объекта соединен с ЭВМ 6 через блок электроники 4, в состав которого входят первый 17 и второй 18 аналого-цифровые преобразователи (АЦП), первый 19 и второй 20 цифро-аналоговые преобразователи (ЦАП), масштабные звенья 21 с коэффициентом передачи l1 и масштабные звенья 22 с коэффициентом передачи 1/l1.
При этом первый датчик угла 13 соединен с первым портом ввода 23 ЭВМ через первый 17 АЦП, второй датчик угла 15 соединен со вторым портом ввода 24 ЭВМ через второй 18 АЦП, первый порт вывода 25 ЭВМ соединен с первым датчиком момента 14 через первый 19 ЦАП, а второй порт вывода 26 ЭВМ соединен со вторым датчиком момента 16 через второй 20 ЦАП.
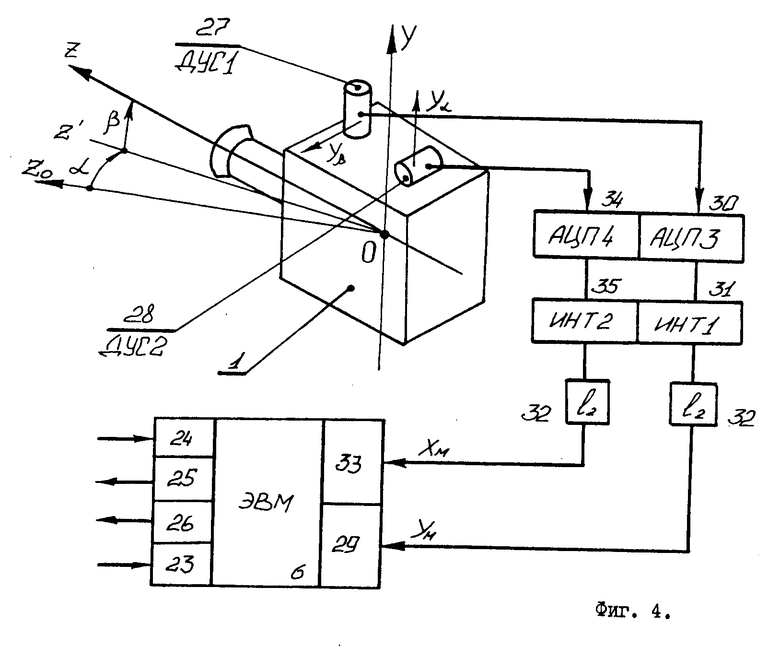
В первом варианте реализации тренажера (см. фиг.4) узел 3 измерительных датчиков состоит из первого 27 и второго 28 датчиков угловой скорости (ДУС). Измерительная ось Y  первого ДУС 27 и измерительная ось Y
первого ДУС 27 и измерительная ось Y  второго ДУС 28 расположены в плоскости, перпендикулярной оптической оси Z кинокамеры 1, соответственно по ее поперечной Х и нормальной Y осям.
второго ДУС 28 расположены в плоскости, перпендикулярной оптической оси Z кинокамеры 1, соответственно по ее поперечной Х и нормальной Y осям.
Первый ДУС 27 соединен с третьим портом ввода 29 ЭВМ через третий 30 АЦП, первый 31 интегратор и масштабное звено 32 с коэффициентом передачи l2. Второй ДУС 28 соединен с четвертым портом ввода 33 ЭВМ через четвертый 34 АЦП, второй 35 интегратор и масштабное звено 32.
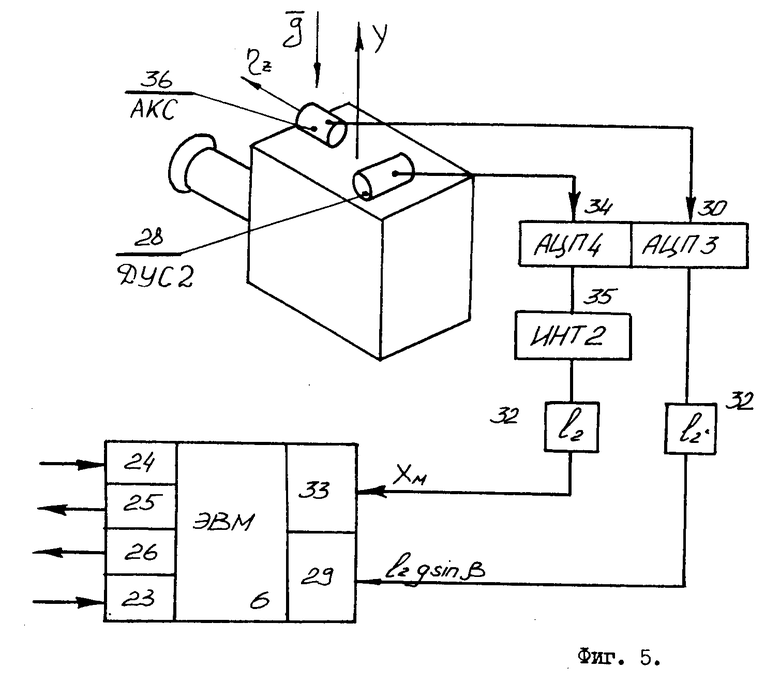
Во втором варианте реализации устройства (см. фиг.5) узел 3 измерительных датчиков состоит из датчика угловой скорости 28 и акселерометра 36. Измерительная ось Y  ДУС 28 расположена по нормальной оси камеры, а измерительная ось ηZ акселерометра 36 - параллельно оптической оси Z кинокамеры.
ДУС 28 расположена по нормальной оси камеры, а измерительная ось ηZ акселерометра 36 - параллельно оптической оси Z кинокамеры.
Выход ДУС 28 соединен с портом ввода 33 через последовательно соединенные звенья 34, 35, 32, а выход акселерометра 36 с портом ввода 29 - через последовательно соединенные звенья 30 и 32.
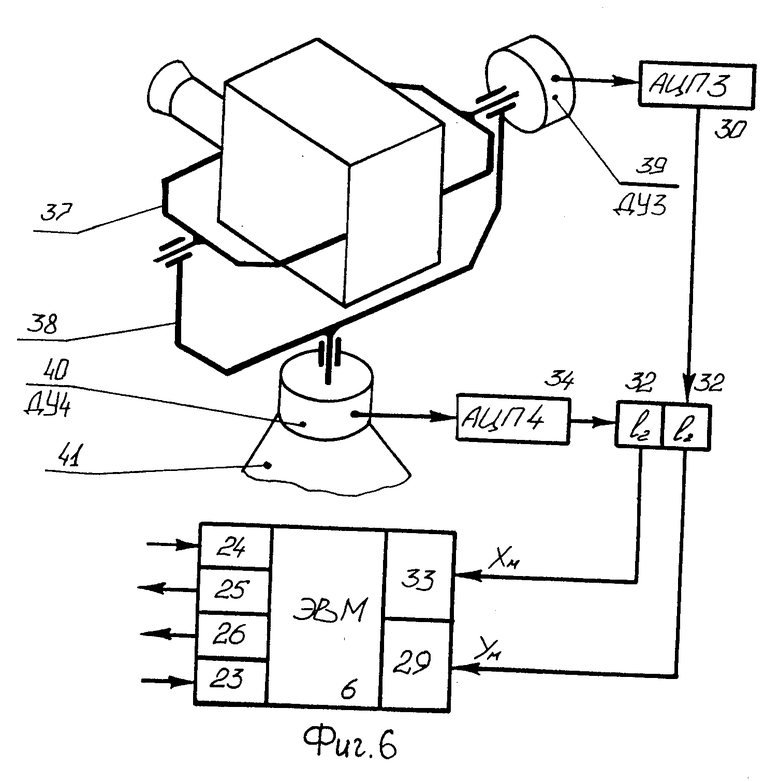
В третьем варианте реализации тренажера (см. фиг.6) узел измерительных датчиков выполнен в виде карданова подвеса, содержащего внутреннюю 37 и наружную 38 рамы, третьего и четвертого 39 и 40 датчиков угла и штатива 41. При этом выход третьего датчика угла 39 соединен с третьим портом ввода 29 через последовательно соединенные звенья 30 и 32, а выход четвертого датчика угла 40 - с четвертым портом ввода 33 через звенья 34 и 32.
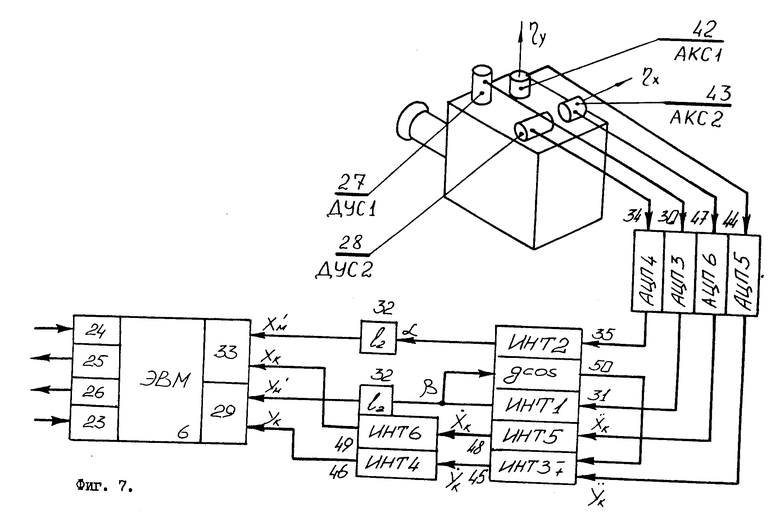
В четвертом варианте исполнения предлагаемого устройства (см. фиг.7) в узел измерительных датчиков, содержащий первый 27 и второй 28 ДУСы, введены первый 42 и второй 43 акселерометры. Измерительные оси ηY первого и ηX второго акселерометров расположены в плоскости, перпендикулярной оптической оси Z кинокамеры соответственно по нормальной оси Y и поперечной оси Х камеры.
В этом варианте построения тренажера цепи обработки сигналов первого ДУСа 27 и второго ДУСа 28 аналогичны соответствующим цепям первого варианта тренажера.
Выход первого акселерометра 42 соединен с суммирующим входом третьего порта вывода 29 ЭВМ через последовательно соединенные пятый 44 АЦП и третий 45 и четвертый 46 интеграторы. Выход второго акселерометра 43 соединен с суммирующим входом четвертого порта ввода 33 ЭВМ через последовательно соединенные шестой 47 АЦП и пятый 48 и шестой 49 интеграторы.
Кроме того, выход первого 31 интегратора соединен с инверсным входом третьего 45 интегратора через масштабный преобразователь 50 с коэффициентом передачи gcos.
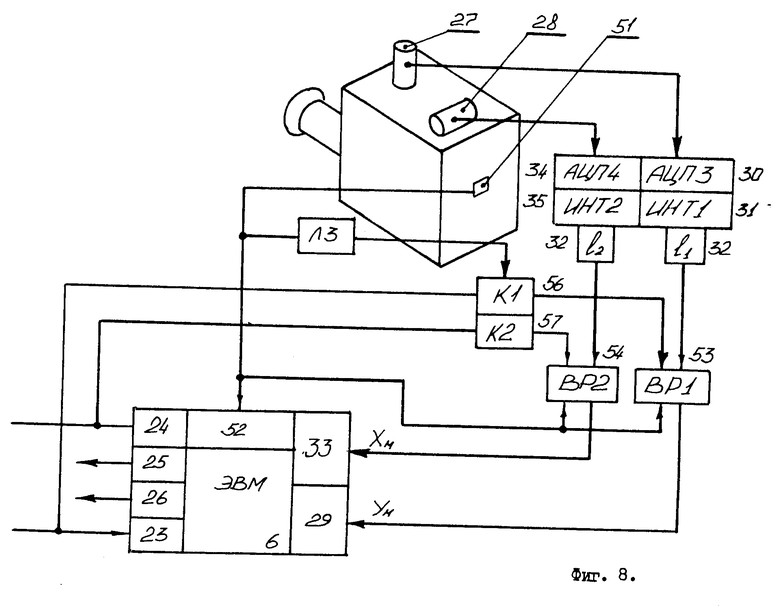
Пятый вариант реализации тренажера иллюстрируется фиг.8. В этом варианте в узел измерительных датчиков введен фотоприемный элемент 51, расположенный в плоскости экспонирования кинопленки в точке пересечения ее с оптической осью кинокамеры. Выход фотоприемного элемента соединен с пятым портом ввода 52 ЭВМ и с управляющими входами буферных регистров 53 и 54 первого 31 и второго 35 интеграторов, а через линию задержки 55 - с управляющими входами первого 56 и второго 57 ключей. При этом в рассматриваемом варианте устройства выход первого 17 АЦП через первый 56 ключ соединен с входом буферного регистра 53 первого 31 интегратора, а выход второго 18 АЦП через второй 57 ключ соединен с входом буферного регистра 54 второго 35 интегратора.
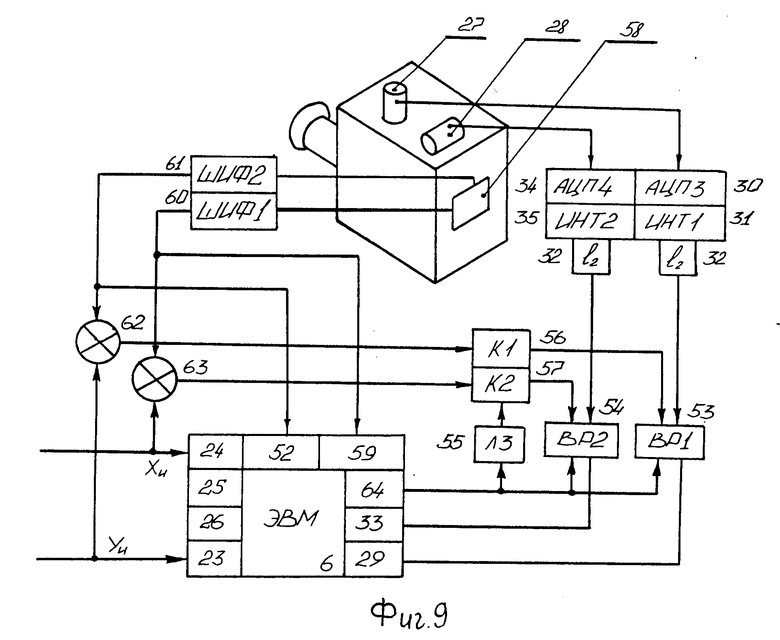
Шестой вариант исполнения предлагаемого устройства поясняется рисунком фиг.9. Здесь в узел измерительных датчиков введена фотоприемная матрица 58. Центр матрицы, расположенной в плоскости экспонирования кинопленки, совпадает с точкой пересечения этой плоскости с оптической осью кинокамеры.
Выходы фотоприемной матрицы 58 соединены с пятым 52 и шестым 59 портами ввода ЭВМ через первый 60 и второй 61 шифраторы. Кроме того, выходы первого 60 и второго 61 шифраторов соединены с первыми входами первого 62 и второго 63 сумматоров. Вторые входы сумматоров соединены с выходами первого 17 АЦП с масштабным звеном 21 и второго 18 АЦП с масштабным звеном 21. Выходы сумматоров 62, 63 соединены с выходами буферных регистров 53, 54 интеграторов 31, 34 соответственно через первый 56 и второй 57 ключи. Третий порт вывода 64 ЭВМ соединен с управляющими входами буферных регистров 53, 54 интеграторов и через линию задержки 54 - с управляющими входами ключей 56 и 57.
Предлагаемое устройство - тренажер для обучения кинооператора работает следующим образом.
При включении питания источника светового потока 12 он создает на экране 7 тренажера световое пятно, которое является тест-объектом. Закон движения тест-объекта на экране задается ЭВМ и воспроизводится блоком 2 имитации движения тест-объекта.
Электронная вычислительная машина 6 в соответствии с записанным в ее память заданным вариантом закона движения тест-объекта выдает в порты вывода 25 и 26 цифровые значения, соответствующие представленным в дискретной форме функциям координат Yп и Хп тест-объекта на экране 7 тренажера, т.е.
Yп = fy*(k τ), Xп = fx*(k τ).
Эти цифровые значения преобразуются цифроаналоговыми преобразователями 19 и 20 в аналоговые величины
Yп = fy(t), Xп = fx(t), которые, пройдя через масштабные звенья 22 с коэффициентом передачи 1/l1, соответствуют углам поворота источника светового потока 12 вокруг оси внутренней рамы карданова подвеса βп= fy'(t) и оси наружной рамы карданова подвеса αп= fx'(t).
Сигналы βп= fy'(t) и αп = fx'(t) отрабатываются датчиками момента 14 и 16, которые поворачивают источник светового потока на соответствующие углы βи и αи. Эти углы преобразуются датчиками угла 13 и 15 в аналоговые сигналы βи= fy''(t) и αи= fx''(t), которые подаются на входы аналого-цифровых преобразователей 17 и 18.
Выходные дискретные сигналы АЦП 17 и 18 равны
βи = fy''*(k τ) и αи = fx''*(k τ), а на выходах масштабных звеньев 21 с коэффициентом передачи l1 будем иметь дискретные величины Yи = fy'''*(k τ) и Xи = =fx'''*(k τ), которые поступают в порты ввода 23 и 24 ЭВМ.
ЭВМ сравнивает заданные цифровые значения Yи и Xи с полученными (измеренными) координатами источника светового потока, соответствующими координатам тест-объекта Yп и Хп. Если измеренные координаты имеют несоответствие с заданными, то ЭВМ командами в датчики момента 14 и 16 устраняет это несоответствие.
Для обучения кинооператора на представляемом тренажере используется модель кинокамеры, в которой не включена протяжка кинопленки и не осуществляется ее экспонирование с последующей обработкой.
Обучаемый кинооператор через оптическую систему модели кинокамеры следит за положением светового пятна (за положением тест-объекта) на экране 7, воздаваемым источником светового потока 12 и блоком 2.
Узел измерительных датчиков выдает сигналы Хм и Yм, пропорциональные пространственному положению оптической оси модели, которые, после преобразования и обработки в блоке электроники 5, поступают в ЭВМ и сравниваются ею с координатами Хи и Yи тест-объекта.
ЭВМ рассчитывает несоответствие координат тест-объекта и оптической оси модели кинокамеры, оценивая тем самым качество работы кинооператора.
ЭВМ формирует также тактовые периоды τ работы АЦП, ЦАП и интеграторов, входящих в блоки электроники тренажера, и синхронизирует работу этих схем.
Рассмотрев общие вопросы работы предлагаемого тренажера, перейдем к описанию функционирования шести основных возможных вариантов его реализации.
Согласно первому варианту реализации тренажера (см.фиг.4) на модели кинокамеры укрепляются два ДУСа. Измерительная ось Y  первого ДУСа 27 располагается по поперечной оси Х камеры, а измерительная ось Y
первого ДУСа 27 располагается по поперечной оси Х камеры, а измерительная ось Y  второго ДУСа 28 - по нормальной оси Y камеры.
второго ДУСа 28 - по нормальной оси Y камеры.
ДУС 27 измеряет проекцию ωx угловой скорости ω движения камеры на ось Y  , совпадающую с осью Х.
, совпадающую с осью Х.
Данная проекция является производной от угла β поворота оптической оси Z камеры от исходного положения оси Z (положение Zо) в вертикальной плоскости, т.е. ωX=  . Аналогично ДУС 28 измеряет ωY= ˙α, где α- угол поворота оси камеры от исходного положения Zо в горизонтальной плоскости. Данные утверждения правомерны при отсутствии движения камеры вокруг оси Z.
. Аналогично ДУС 28 измеряет ωY= ˙α, где α- угол поворота оси камеры от исходного положения Zо в горизонтальной плоскости. Данные утверждения правомерны при отсутствии движения камеры вокруг оси Z.
Выходные сигналы ДУСов являются аналоговыми электрическими сигналами, пропорциональными угловым скоростям ωX и ωY движения кинокамеры. Эти сигналы преобразуются АЦП 30 и 34 блока электроники 5 в цифры, которые интегрируются интеграторами 31 и 35 с получением на их выходах цифровых эквивалентов углов поворота α и β оптической оси камеры относительно исходного положения в горизонтальной и вертикальной плоскостях.
После прохождения сигналов, эквивалентных углам α и β, масштабных звеньев 32 с коэффициентом передачи l2 получаем значения координат Xм, Yм точки пересечения оптическoй оси Z камеры с экраном. Эти координаты сравниваются ЭВМ 6 с координатами Xи, Yи тест-объекта и оценивается работа оператора.
По выполнении оператором одного упражнения по съемке подвижного тест-объекта кинокамера возвращается в исходное положение, а накопившиеся погрешности на выходах интеграторов 31 и 35 обнуляются. Таким образом перед каждым новым упражнением при подготовке кинокамеры к работе осуществляется коррекция цепей обработки выходных сигналов ДУСов узла измерительных датчиков.
Аналогичные операции производятся и перед выполнением оператором первого упражнения.
Необходимо отметить, что функции интеграторов 31 и 35 и масштабных звеньев 32 можно передать ЭВМ 6, что упрощает схему блока электроники 5.
Второй вариант реализации тренажера предусматривает наличие в узле измерительных датчиков датчика угловой скорости 28 и акселерометра 36.
Алгоритм цепи ДУС 28 - АЦП 34 - интегратор 35 - звено 32 - порт ввода 33 не отличается от рассмотренного для первого варианта.
Измерительная ось ηZ акселерометра 36 параллельна оси Z камеры. При наклонах камеры на угол β в вертикальной плоскости выходной сигнал акселерометра пропорционален проекции вектора  ускорения силы тяжести на ось ηZ, т. е. пропорционален gsin β. Этот аналоговый сигнал преобразуется АЦП 30 в цифровую форму и после прохождения звена 32 с коэффициентом передачи l2 поступает в порт ввода 29 ЭВМ 6. Вычислительная машина преобразует входной сигнал l2gsin β к виду l2 β, т.е. рассчитывает координату Yм точки пересечения оси Z камеры с экраном.
ускорения силы тяжести на ось ηZ, т. е. пропорционален gsin β. Этот аналоговый сигнал преобразуется АЦП 30 в цифровую форму и после прохождения звена 32 с коэффициентом передачи l2 поступает в порт ввода 29 ЭВМ 6. Вычислительная машина преобразует входной сигнал l2gsin β к виду l2 β, т.е. рассчитывает координату Yм точки пересечения оси Z камеры с экраном.
Применение в узле измерительных датчиков акселерометра 36 вместо ДУСа 27 упрощает конструкцию тренажера и повышает точность его работы по координате Y, так как обработка сигнала по этому каналу не содержит операции интегрирования.
Третий вариант выполнения тренажера ограничивает режим работы оператора: съемка может производиться камерой, обязательно установленной на штативе (см. фиг.6). Выходной сигнал датчика угла 40 пропорционален углу α отклонения оси Z камеры от исходного положения в горизонтальной плоскости, выходной сигнал датчика угла 39 - углу β отклонения оси Z в вертикальной плоскости.
Аналоговые выходные сигналы датчиков угла 40 и 39 преобразуются цепями АЦП 34 - звено 32 и АЦП 30 - звено 32 в цифровые величины, соответствующие координатам Хм, Yм камеры, и вводятся в порты 33 и 29 ЭВМ 6.
Конструкция тренажера по третьему варианту значительно проще, чем по первому и второму вариантам. Кроме того, она обеспечивает повышение точности работы устройства по сравнению с первым и вторым вариантами, так как в обработку информации и по координате Х и по координате Y не входит операция интегрирования.
В четвертом варианте выполнения тренажера (см. фиг.7) узел измерительных датчиков, помимо двух ДУСов 27 и 28, содержит два акселерометра 42 и 43. Дело в том, что при построении тренажера по первому варианту, его работе присущи погрешности, обусловленные невозможностью ДУСов измерять поступательные движения камеры по координатам Х и Y.
В четвертом варианте тренажера акселерометр 43 измеряет ускорение  движения камеры по оси Х, а акселерометр 42 - ускорение
движения камеры по оси Х, а акселерометр 42 - ускорение  движения камеры по оси Y и, кроме того, проекцию gcos β вектора
движения камеры по оси Y и, кроме того, проекцию gcos β вектора  ускорения силы тяжести на измерительную ось ηY этого акселерометра. При этом, как уже отмечалось выше, мы исключаем возможность движения камеры вокруг оси Z.
ускорения силы тяжести на измерительную ось ηY этого акселерометра. При этом, как уже отмечалось выше, мы исключаем возможность движения камеры вокруг оси Z.
Алгоритмы цепей обработки сигналов ДУСов 27 и 28 не отличаются от описанных для первого варианта. Аналоговые выходящие сигналы акселерометров 42 и 43 преобразуются АЦП 44 и 47 в цифровую форму. Интеграторы 45 и 46 производят двойное интегрирование ускорения  , определяя перемещения Yк камеры по оси Y. Аналогично интеграторы 48 и 49 определяют перемещение Хк камеры по оси Х. В портах ввода 33 и 29 осуществляется прием координат Хм', Хк и Yм', Yк. Далее ЭВМ рассчитывает уточненные координаты Хм = Хм' + Хк и Yм= = Yм' + Yк модели кинокамеры.
, определяя перемещения Yк камеры по оси Y. Аналогично интеграторы 48 и 49 определяют перемещение Хк камеры по оси Х. В портах ввода 33 и 29 осуществляется прием координат Хм', Хк и Yм', Yк. Далее ЭВМ рассчитывает уточненные координаты Хм = Хм' + Хк и Yм= = Yм' + Yк модели кинокамеры.
Для исключения погрешности определения перемещения Yк камеры, обусловленной наличием в выходном сигнале акселерометра 42 составляющей gcos β, цепи обработки сигналов содержaт корректирующую цепь с масштабным преобразователем 50. Выходной сигнал интегратора 31, пропорциональный углу β, преобразуется в gcosβ, который на входе интегратора 45 вычитается из сигнала  + gcosβ, повышая точность работы тренажера.
+ gcosβ, повышая точность работы тренажера.
Работа четвертого варианта тренажера описана в случае выполнения узла измерительных датчиков на двух ДУСах. Однако, четвертый вариант тренажера может быть также построен в случае, когда узел измерительных датчиков содержит ДУС и акселерометр (второй вариант тренажера).
Работу пятого варианта тренажера рассмотрим на примере выполнения узла измерительных датчиков, содержащего два ДУСа. Однако, пятый вариант тренажера может быть реализован также на базе второго и четвертого вариантов.
В пятом варианте тренажера в узел измерительных датчиков введен фотоприемный элемент 51 (см. фиг.8). В порты 23 и 24 ЭВМ от блока 2 поступают координаты Yи, Хи движения тест-объекта. В порты 29 и 33 от узла измерительных датчиков поступают координаты Yм, Хм камеры. При определении этих координат интеграторы 31 и 35 выполняют операции потактного интегрирования угловых скоростей ωX и ωY камеры, т.е.
α1 = 0 + ωX1 τ
αk = αk-1 + ωXk τ
βk = βk-1 + ωYk τ
Результаты интегрирования αk и βk записываются в выходные буферные регистры 53 и 54 интеграторов 31 и 35.
Из-за погрешностей измерения ДУСами угловых скоростей ωX, ωYкинокамеры на выходах интеграторов в буферных регистрах накапливаются ошибки определения координат камеры.
В моменты времени, когда кинооператор, следя за тест-объектом (за световым пятном на экране), совмещает оптическую ось камеры со световым пятном на экране, фотоприемный элемент 51 вырабатывает импульс.
Этот импульс поступает в пятый порт ввода 52 ЭВМ и приравнивает нулю ошибку работы оператора. Этот же импульс сбрасывает на нуль буферные регистры 53 и 54, а затем открывает ключи 56, 57, через которые в регистры 53, 54 записываются координаты Хи, Yи тест-объекта.
Таким образом, в рассмотренном варианте коррекция каналов обработки сигналов узла измерительных датчиков осуществляется не только в исходном положении кинокамеры при ее подготовке к работе, но и в процессе работы оператора в моменты времени, когда он совмещает оптическую ось кинокамеры со световым пятном на экране.
Работа шестого варианта тренажера описана на примере выполнения узла измерительных датчиков, состоящего из двух ДУСов. Однако, шестой вариант тренажера, как и пятый вариант, может быть реализован на базе второго и четвертого вариантов.
В шестом варианте тренажера (см. фиг.9) в узел измерительных датчиков введена фотоприемная матрица 58.
Если изображение светового пятна (тест-объекта) попадает на поле матрицы, то ее выходные сигналы через шифраторы 60 и 61 поступают в порты ввода 51 и 59 ЭВМ. Эти сигналы являются разностями координат Хм - Хи, Yм - Yи тест-объекта и оптической оси кинокамеры и анализируются ЭВМ, которая оценивает качество работы оператора.
Одновременно ДУСы 27, 28 и цепи обработки их сигналов накапливают в регистрах 53 и 54 координаты Хм, Yм камеры. В эти координаты входит погрешность, обусловленная неточностью работы ДУСов.
В момент времени, когда изображение светового пятна попадает на внешний ряд фотоматрицы (что фиксируется анализом сигналов матрицы в ЭВМ), третий порт вывода 62 ЭВМ выдает командный сигнал, который сбрасывает на нуль буферные регистры 53, 54. Затем этот же сигнал открывает ключи 56, 57, через которые в регистры 53, 54 записываются суммы сигналов
Хн + (Хм - Хи) = Хм,
Yн + (Yм - Yи) = Yм, т.е. координаты кинокамеры в момент времени, когда изображение светового пятна попало на внешний ряд фотоматрицы.
Качество работы оператора оценивается ЭВМ по сигналам с шифраторов.
Если изображение светового пятна выходит из "поля зрения" фотоматрицы (что опять фиксируется анализом сигналов матрицы в ЭВМ), третий порт вывода 62 ЭВМ выдает командный сигнал, который закрывает ключи 56, 57. В это время тренажер работает в режиме, который был описан выше для первого варианта. Такой режим работы прекращается, как только изображение светового пятна попадет на внешний ряд матрицы. С этого момента времени тренажер работает в уже описанном выше режиме.
Использование: изобретение относится к кинотехнике, в частности к тренажерам для обучения кинооператора. Сущность изобретения: устройство состоит из модели кинокамеры, снабженной датчиками ориентации, экрана, проектора, установленного в кардановом подвесе и снабженного приводом поворота и датчиками угла вычислительного блока, причем датчики ориентации и датчики угла связаны с вычислительным блоком. 3 з.п. ф-лы, 9 ил.
| МНОГОСТУПЕНЧАТЫЙ ДРОССЕЛЬНО-РЕГУЛИРУЮЩИИ | 0 |
|
SU379795A1 |
| Механический грохот | 1922 |
|
SU41A1 |
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
