3 qnp Oifiv n
tlUb-S 1 4 ..„jftt:
Li sJfj
/ 4 ..№
f.
1 4 ..„jftt:
fj
/ 4 ..№
f.
Ю
-t
i
Изобретение относится к грузоподъем- ным машинам, предназначенным для подъема груза, имеющего одну степень свободы перемещения, и может найти применение, например, в механизмах для подъема чер- паковых рам драг глубокого черпания, где подъем и опускание черпаковой рамы производится несколькими автономно действующими лебедками.
Цель изобретения - упрощение конструкции устройства, улучшение условий его эксплуатации и снижение трудоемкости изготовления.
На чертеже представлена принципиаль- ня схема устройства для перемещения общего груза.
Устройство содержит электродвигатели 1 лебедок, кинематически соединенные с редукторами 2, барабанами 3 и тормозами 4, станцию 5 управления, электрически соединенную с электродвигателями 1, командным аппаратом 6 и электрическим блоком 7 предварительного автоматического торможения. Электрический блок 7 предварительного автоматического торможения электрически соединен с механизмом 8 контроля скорости.
Груз 9, например черпаковая рама драги, повешен на тяговых канатах 10.
Механизм 8 контроля скорости кинематически соединен с одним из приводов и связан со станцией 5 управления через блок 7 предварительного автоматического торможения. Таким образом, механизм 8 контроля скорости, электрически соединенный блоком 7 предварительного автоматического торможения и станцией 5 управления, представляет собой узел выравнивания натяжения канатов 10.
Устройство работает следующим образом.
Подъем и опускание груза осществляет- ся включением электродвигателей 1 посредством станции 5 управления по сигналу, подаваемому оператором с помощью командного аппарата 6 управления. При необходимости удержания груза в подвешенном состоянии оператор командным аппаратом 6 управления подает сигнал на станцию 5
двигатели 1 переходят в режим электрического торможения. Механическими характеристиками электродвигателей 1 обеспечивается равномерное распределение на них
,- нагрузок при торможении.
В процессе торможения скорость барабанов 3 лебедок контролируется механизмом 8 контроля скорости, который при снижении скорости до заранее заданного минимального значения срабатывает и подает сигнал
10 на электрический блок 7 предварительного автоматического торможения, а через блок 7 и на станцию 5 управления на отключение электродвигателей 1 и наложение тормо,- зов 4.
15 Величина минимальной скорости, на которую настраивается механизм 8 контроля скорости, определяется исходя из времени последовательного срабатывания аппаратуры управления торможения, станции 5 управления и тормозов 4, а также момента
7П- , инерции движущихся частей лебедок и груза 9.
В результате- наложения тормозов 4, при малой или нулевой скорости барабанов 3, разность их выбега, а следовательно, и вы25 бега канатов получается минимальной либо отсутствует, что обеспечивает минимальную разницу в натяжении канатов, либо ее отсутствие.
Использование изобретения позволяет упростить конструкцию устройства и улуч30 шить условия его эксплуатации.
Формула изобретения
Устройство для выравнивания натяжения канатов лебедок для подъема общего
35 груза, содержащее группу электромеханических приводов для тяговых канатов с индивидуальными электродвигателями, электрически соединенными с общими станцией управления и командным аппаратом, и узел
40 выравнивания натяжения канатов, отличающееся тем, что, с целью упрощения конструкции и улучшения условий эксплуатации, узел выравнивания натяжения канатов представляет собой электрический блок
предварительного автоматического торможе- управления на отключение и предваритель- 45 ния и кинематически связанный с одним из ное торможение электродвигателей 1. Со приводов механизм контроля скорости, кото- станции 5 управления сигнал поступает на рый связан со станцией управления через электрический блок 7 предварительного ав- блок предварительного автоматического тор- томатического торможения. Электрические можения.
двигатели 1 переходят в режим электрического торможения. Механическими характеристиками электродвигателей 1 обеспечивается равномерное распределение на них
нагрузок при торможении.
В процессе торможения скорость барабанов 3 лебедок контролируется механизмом 8 контроля скорости, который при снижении скорости до заранее заданного минимального значения срабатывает и подает сигнал
на электрический блок 7 предварительного автоматического торможения, а через блок 7 и на станцию 5 управления на отключение электродвигателей 1 и наложение тормо,- зов 4.
Величина минимальной скорости, на которую настраивается механизм 8 контроля скорости, определяется исходя из времени последовательного срабатывания аппаратуры управления торможения, станции 5 управления и тормозов 4, а также момента
П- ,и инерции движущихся частей лебедок и груза 9.
В результате- наложения тормозов 4, при малой или нулевой скорости барабанов 3, разность их выбега, а следовательно, и вы5 бега канатов получается минимальной либо отсутствует, что обеспечивает минимальную разницу в натяжении канатов, либо ее отсутствие.
Использование изобретения позволяет упростить конструкцию устройства и улуч0 шить условия его эксплуатации.
Формула изобретения
Устройство для выравнивания натяжения канатов лебедок для подъема общего
5 груза, содержащее группу электромеханических приводов для тяговых канатов с индивидуальными электродвигателями, электрически соединенными с общими станцией управления и командным аппаратом, и узел
0 выравнивания натяжения канатов, отличающееся тем, что, с целью упрощения конструкции и улучшения условий эксплуатации, узел выравнивания натяжения канатов представляет собой электрический блок
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выравнивания натяженияКАНАТОВ лЕбЕдОК для пОд'ЕМА ОбщЕгОгРузА | 1979 |
|
SU821395A1 |
| НАТЯЖНОЕ УСТРОЙСТВО ЛЕНТОЧНОГО КОНВЕЙЕРА | 2002 |
|
RU2214355C1 |
| ПРИВОД МНОГОЧЕРПАКОВОЙ ДРАГИ | 1969 |
|
SU233049A1 |
| Устройство управления добычным комплексом драги | 1980 |
|
SU972005A1 |
| Устройство для автоматического регулирования нагрузки черпаковой цепи драги | 1977 |
|
SU682604A1 |
| СПОСОБ ЭЛЕКТРИЧЕСКОГО УПРАВЛЕНИЯ ПОДЪЕМНЫМ КРАНОМ С МНОЖЕСТВОМ ТОЧЕК ПОДВЕСА | 2007 |
|
RU2445250C2 |
| УСТАНОВКА ДЛЯ СТАБИЛИЗАЦИИ ВИТЫХ ИЗДЕЛИЙ | 2004 |
|
RU2293808C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2556041C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2556135C1 |
| Электропривод лебедок носовых канатов драги | 1986 |
|
SU1421827A1 |
Изобретение относится к грузоподъемным машинам и может найти применение, например, в механизмах для подъема черпаковых рам драг одновременно несколькими лебедками. Цель изобретения - упрощение конструкции устройства, улучшение условий его эксплуатации и снижение трудоемкости изготовления. Устройство содержит электродвигатели 1 лебедок, соединенные с редукторами 2, барабанами 3 и тормозами 4, станцию управления 5, электрически соединенную с электродвигателями 1, командным аппаратом 6 и электрическим блоком 7 предварительного автоматического торможения. Блок 7 электрически соединен с механизмом 8 контроля скорости, который, в свою очередь, кинематически соединен с одним из приводов, и в совокупности с блоком 7 представляет узел выравнивания натяжения канатов 10. В процессе торможения скорость барабанов 3 лебедок контролируется механизмом 8, который выдает сигнал через блок 7 и станцию управления 5 на отключение двигателей 1 и наложение тормозов. 1 ил.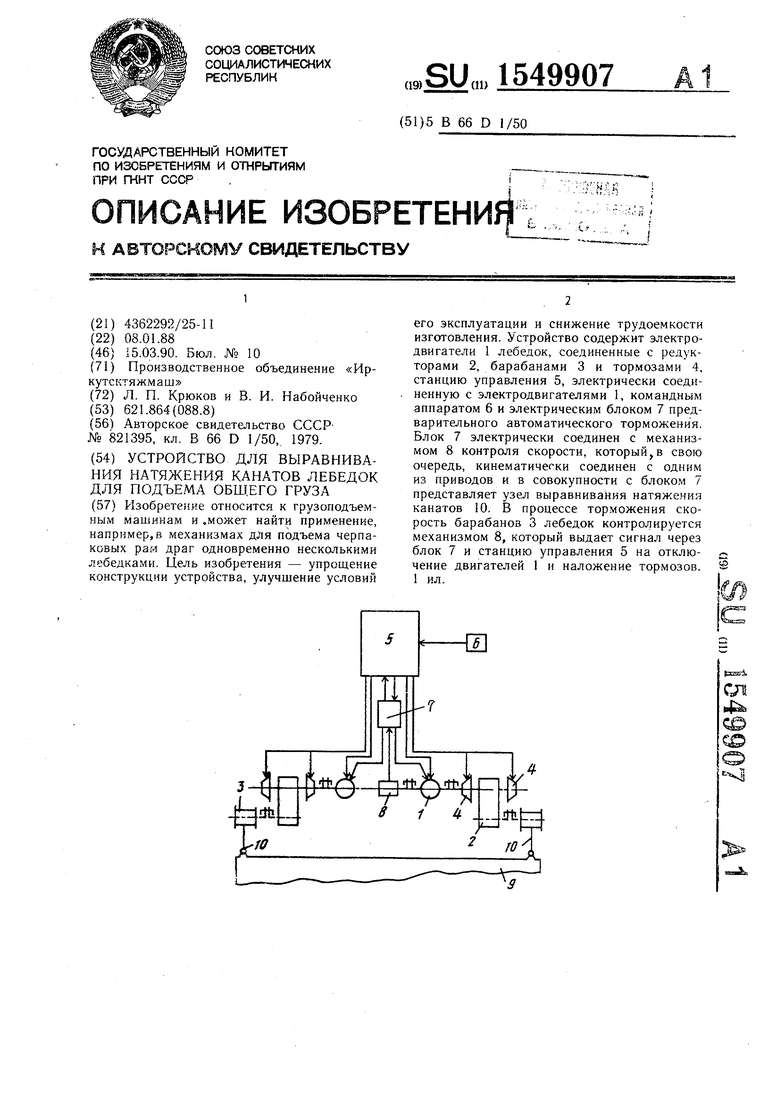
| Устройство для выравнивания натяженияКАНАТОВ лЕбЕдОК для пОд'ЕМА ОбщЕгОгРузА | 1979 |
|
SU821395A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
