Изобретение относится к горному делу, в частности -забойным пневмо- баллонным крепям, примэняемым при безлюдной выемке весьма тонких крутых пластов.
Цель изобретения - повышение надежности передвижки секций крепи при изменяющихся горно-геологических условиях.
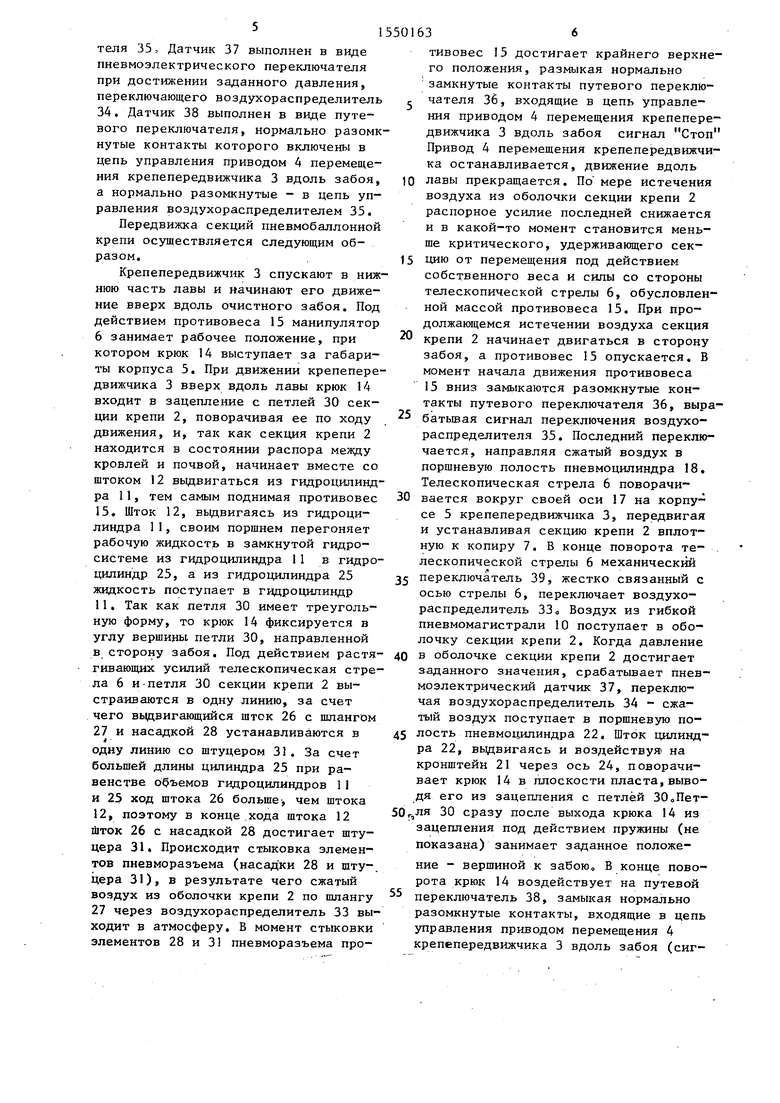
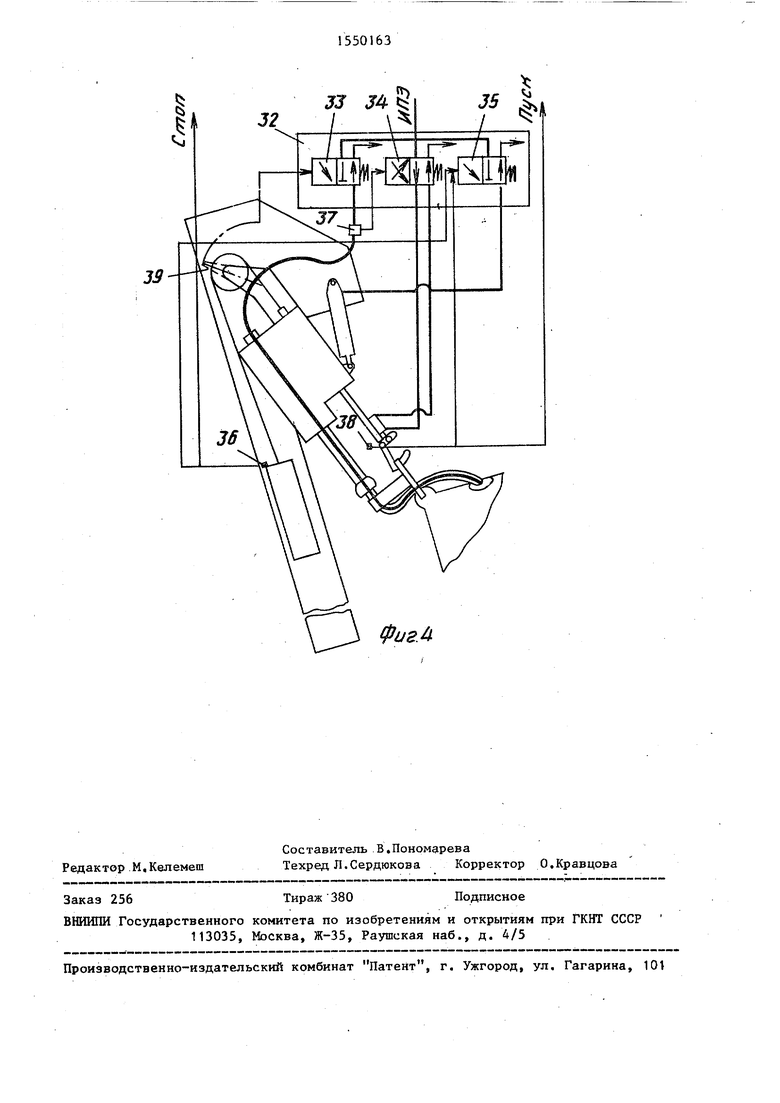
На фиг.1 показана пневмобаллонная крепь, вид в плане; на - пере- движчик крепи; на фиг.З - вид А на фиг.2 (зацепление крюка в петле, мо- мент стыковки); на фиго4 - схема системы управления о
Очистной забой оборудуется выемочной машиной 1, пневмобаллонными секциями крепи 2 и крепепередвижчиком 3 с приводом 4 перемещения вдоль забоя. Крепепередвижчик 3 состоит из корпуса 5, к которому шарнирно крепится телескопическая стрела 6, копира 7, являющегося продолжением корпуса 5, системы 8 управления, размещенной в корпусе 5, гибкого тягового органа 9 и гибкой напорной магистрали 10. Телескопический манипулятор (телескопическая стрела) 6 содержит гидроцилинд 11 с полым штоком 12, в котором пропущен трос 13 закрепленный одним концом к основанию крюка 14, а другим - к противовесу 15 компенсатора высоты, расположенному в корпусе 5. Трос 13 огибает обводной ролик 16, ось которого жестко связана с гидро- цилиндром .11. Телескопическая стрела 6 по оси 17 шарнирно крепится к корпусу 5 крепепередвижчика 3. Поворот стрелы 6 в плоскости пласта осуществляется пневмоцилиндром 18, крепящимся к корпусу 5 на оси 19, а к гидроцилиндру 11 - на оси 20. Крюк 14 крепится шарнирно к штоку 12 и выполнен с кронштейном 2I. На конце штока 12 жестко закреплен пневмоцилиндр 22 управления крюком 14 в плоскости пласта, шток 23 которого через ось 24 свя
Q Q е .
5
зан с кронштейном 21„ К гидроцилиндру 11 жестко крепится равный ему по объему, но более длинный гидроцилиндр 25 с полым штоком 26, в котором пропущен гибкий шланг 27 с насадкой 28 на одном конце, а другим концом прикрепленным к системе 8 управления. Гидро- цилиндры 11 и 25 имеют равный рабочий объем, установлены параллельно один другому и встречно соединены между собой, образуя замкнутую гидросистему, заполненную жидкостью. Гидроцилиндры 11 и 25 опираются о почву при- забойного пространства через лыжу 29. Секция крепи 2 снабжена подпружиненной петлей 30, шарнирно закрепленной на верхнем углу секции крепи 2 со стороны забоя перпендикулярно плоскости пласта. Одна из вершин петли 30 направлена в сторону забоя, а на прилегающей к ней стороне жестко закреплен Штуцер 31 пневморазъема, также направленный в сторону забоя. Система 8 управления содержит блок 32 распределителей, включающий воздухораспределитель 33 управления режимами найол- нения и разгрузки оболочки крепи, воздухораспределитель 34 управления поворотом крюка 14 в плоскости пласта и воздухораспределитель 35 управления поворотом телескопической стрелы 6 в плоскости пласта; датчик 36 стыковки пневмосистемы, установленный в корпусе 5 крепепередвижчика 3; датчик 37 давления, установленный в шланге 27, датчик 38 нерабочего положения крюка, установленный на штоке 12, и механический переключатель 39, жестко связанный с осью, поворота телескопической стрелы 6 в плоскости пласта. Датчик 36 выполнен в виде путевого переключателя, нормально замкнутые контакты которого входят в цепь управления привода 4 перемещения крепепередвижчика 3 вдоль забоя, а нормально разомкнутые - в цепь управления воздухораспределителя 35, Датчик 37 выполнен в виде пневмоэлектрического переключателя при достижении заданного давления, переключающего воздухораспределитель 34. Датчик 38 выполнен в виде путевого переключателя, нормально разомкнутые контакты которого включены в цепь управления приводом 4 перемещения крепепередвижчика 3 вдоль забоя, а нормально разомкнутые - в цель управления воздухораспределителем 35.
Передвижка секций пневмобаллонной крепи осуществляется следующим образом.
Крепепередвижчик 3 спускают в нижнюю часть лавы и начинают его движение вверх вдоль очистного забоя. Под действием противовеса 15 манипулятор 6 занимает рабочее положение, при котором крюк 14 выступает за габариты корпуса 5. При движении крепепередвижчика 3 вверх вдоль лавы крюк 14 входит в зацепление с петлей 30 секции крепи 2, поворачивая ее по ходу движения, и, так как секция крепи 2 находится в состоянии распора между кровлей и почвой, начинает вместе со штоком 12 выдвигаться из гидроцилиндра 11, тем самым поднимая противовес 15. Шток 12, выдвигаясь из гидроцилиндра 11, своим поршнем перегоняет рабочую жидкость в замкнутой гидросистеме из гидроцилиндра 11 в гидроцилиндр 25, а из гидроцилиндра 25 жидкость поступает в гидроцилиндр
11.Так как петля 30 имеет треугольную форму, то крюк 14 фиксируется в углу вершины петли 30, направленной
в сторону забоя. Под действием растягивающих усилий телескопическая стрела 6 и петля 30 секции крепи 2 выстраиваются в одну линию, за счет чего выдвигающийся шток 26 с шлангом 27 и насадкой 28 устанавливаются в
4
одну линию со штуцером 31. За счет большей длины цилиндра 25 при равенстве объемов гидроцилиндров 11 и 25 ход штока 26 больше, чем штока
12,поэтому в конце хода штока 12 Шток 26 с насадкой 28 достигает штуцера 31. Происходит стыковка элементов пневморазъема (насадки 28 и штуцера 31), в результате чего сжатый воздух из оболочки крепи 2 по шлангу 27 через воздухораспределитель 33 выходит в атмосферу. В момент стыковки элементов 28 и 31 пневморазъема про10
5
0
5
тивовес 15 достигает крайнего верхнего положения, размыкая нормально замкнутые контакты путевого переключателя 36, входящие в цепь управления приводом 4 перемещения крепепередвижчика 3 вдоль забоя сигнал Стоп Привод 4 перемещения крепепередвижчи- ка останавливается, движение вдоль лавы прекращается. По мере истечения воздуха из оболочки секции крепи 2 распорное усилие последней снижается и в какой-то момент становится меньше критического, удерживающего секцию от перемещения под действием собственного веса и силы со стороны телескопической стрелы 6, обусловленной массой противовеса 15. При продолжающемся истечении воздуха секция крепи 2 начинает двигаться в сторону забоя, а противовес 15 опускается. В момент начала движения противовеса 15 вниз замыкаются разомкнутые контакты путевого переключателя 36, вырабатывая сигнал переключения воздухораспределителя 35. Последний переключается, направляя сжатый воздух в поршневую полость пневмоцилиндра 18. Телескопическая стрела 6 поворачивается вокруг своей оси 17 на корпусе 5 крепепередвижчгаса 3, передвигая и устанавливая секцию крепи 2 вплотную к копиру 7. В конце поворота телескопической стрелы 6 механический 5 переключатель 39, жестко связанный с осью стрелы 6, переключает воздухораспределитель 33о Воздух из гибкой пневмомагистрали 10 поступает в оболочку секции крепи 2. Когда давление в оболочке секции крепи 2 достигает заданного значения, срабатывает пнев- моэлектрический датчик 37, переключая воздухораспределитель 34 - сжатый воздух поступает в поршневую полость пневмоцилиндра 22. Шток цилиндра 22, выдвигаясь и воздействуя на кронштейн 21 через ось 24, поворачивает крюк 14 в плоскости пласта, выводя его из зацепления с петлей 30„Пет- 0Г,ЛЯ 30 сразу после выхода крюка 14 из зацепления под действием пружины (не показана) занимает заданное положение - вершиной к забоЮд В конце поворота крюк 14 воздействует на путевой переключатель 38, замыкая нормально разомкнутые контакты, входящие в цепь управления приводом перемещения 4 крепепередвижчика 3 вдоль забоя (сиг0
0
5
5
715
нал Пуск) и размыкая нормально замкнутые контакты, входящие в цепь управления воздухораспределителя 35, возвращая тем самым воздухораспределитель 35 в исходное состояние. Воздух из пневмоцилиндра 18 выходит в атмосферу, включается привод 4 и начинается перемещение крепепередвиж- чика 3 вдоль забоя, В момент трогани крепепередвижчика происходит разделение элементов 28 и 31 пневморазъема, в результате чего срабатывает клапан в штуцере 31, предотвращая выпуск воздуха из оболочки секции крепи 2, а пневмоэлектрический датчик 37 срабатывает в обратную сторону, возвращая воздухораспределитель ЗА в исходное положение, тем самым переводя крюк 14 в рабочее состояние. Иод действием противовеса 15 телескопическая стрела 6 отклоняется от оси движения крепепередвижчика, из-за чего механический переключатель 39 отходит от воздухораспределителя 33, который возвращается в исходное положение, тем самым прекращая подачу сжатого воздуха к насадке 28. Далее крепепередвижчик подходит к следующей секции крепи, и все операции повторяются в описанном порядке.
8
. с 0
му управления, с я тем, что,
0
5
отличающая- с целью повышения надежности передвижки секций крепи при изменяющихся горно-геологических условиях, манипулятор выполнен из лыжи, шарнирно установленных на ней параллельно один другому двух гидроцилиндров разной долины, которые имеют равные рабочие объемы и встречно соединены между собой, и компенсатора высоты с противовесом, установленного на корпусе манипулятора, а захват выполнен в виде крюка с приводом поворота, шарнирно закрепленного на штоке более короткого гидроцилиндра и связанного с противовесом посредством гибкой тяги, пропущенной через полый шток этого гидроцилиндра, при этом каждая пневмобаллонная секция крепи снабжена шарнирно закрепленной на ней в верхнем углу со стороны забоя подпружиненной треугольной петлей, на которой установлен пневмо- разъем секции крепи, а пневморазъем манипулятора установлен на штоке более длинного гидроцилиндра и связан с напорной магистралью посредством гибкого шланга, который пропущен через этот гидроцилиндр.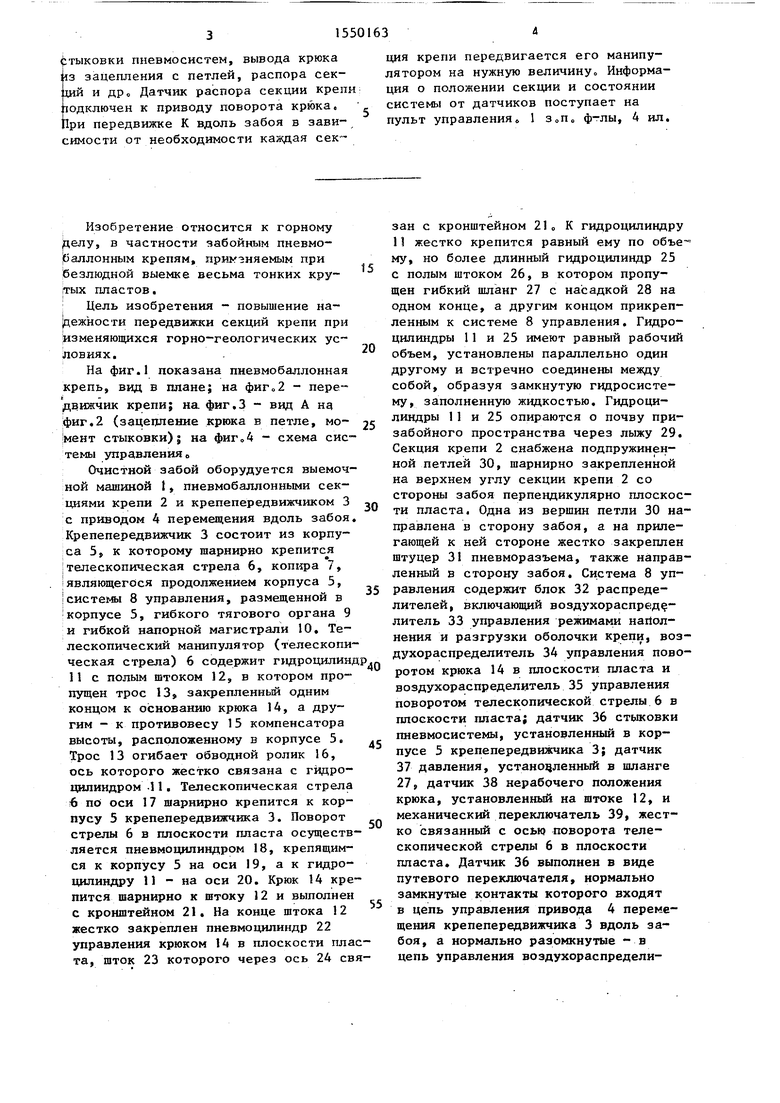
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОХОДЧЕСКО-ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС (БЛОК) | 1998 |
|
RU2172410C2 |
| МЕХАНИЗИРОВАННАЯ ПНЕВМАТИЧЕСКАЯ КРЕПЬ | 2001 |
|
RU2205961C1 |
| Механизированная пневматическая крепь | 1988 |
|
SU1553711A1 |
| МЕХАНИЗИРОВАННАЯ ПНЕВМАТИЧЕСКАЯ КРЕПЬ | 1990 |
|
RU2030588C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |
| Пневмобаллонная крепь | 1979 |
|
SU815313A1 |
| Агрегатированная механизированная крепь | 1989 |
|
SU1739046A1 |
| МЕХАНИЗИРОВАННАЯ ПНЕВМАТИЧЕСКАЯ КРЕПЬ | 1991 |
|
RU2030589C1 |
| Агрегат для выемки угля | 1977 |
|
SU730968A1 |
| Механизированная пневматическая крепь | 1989 |
|
SU1717841A1 |
Изобретение относится к горному делу, а именно к пневмобаллонным крепям очистных забоев. Цель - повышение надежности передвижки крепи при изменяющихся горно-геологических условиях. Крепь состоит из пневмобаллонных секций 2, установленных вдоль забоя, крепепередвижчика (К). На К шарнирно установлен манипулятор 6, выполненный из двух гидроцилиндров (Г) 11, 25. Каждый из Г 11, 25 выполнен с полым штоком, установлен на лыже 29 параллельно другому Г, имеет равный рабочий объем и встречно подключен к другому. Крюк 14 захвата шарнирно закреплен на более коротком Г 11 и связан с противовесом 15 гибкой тягой, пропущенной через его шток. К более длинному Г 25 прикреплен пневморазъем манипулятора 8, связанный гибким шлангом 27, пропущенным через его шток, с напорной магистралью. Каждая секция крепи выполнена с треугольной петлей 30, шарнирно закрепленной в верхнем углу с забойной стороны. На петле 30 крепится пневморазъем секции крепи. Система управления снабжена датчиками: стыковки пневмосистем, вывода крюка из зацепления с петлей, распора секций и др. Датчик распора секции крепи подключен к приводу поворота крюка. При передвижке К вдоль забоя в зависимости от необходимости каждая секция крепи передвигается его манипулятором на нужную величину. Информация о положении секции и состоянии системы от датчиков поступает на пульт управления. 1 з.п.ф-лы, 4 ил.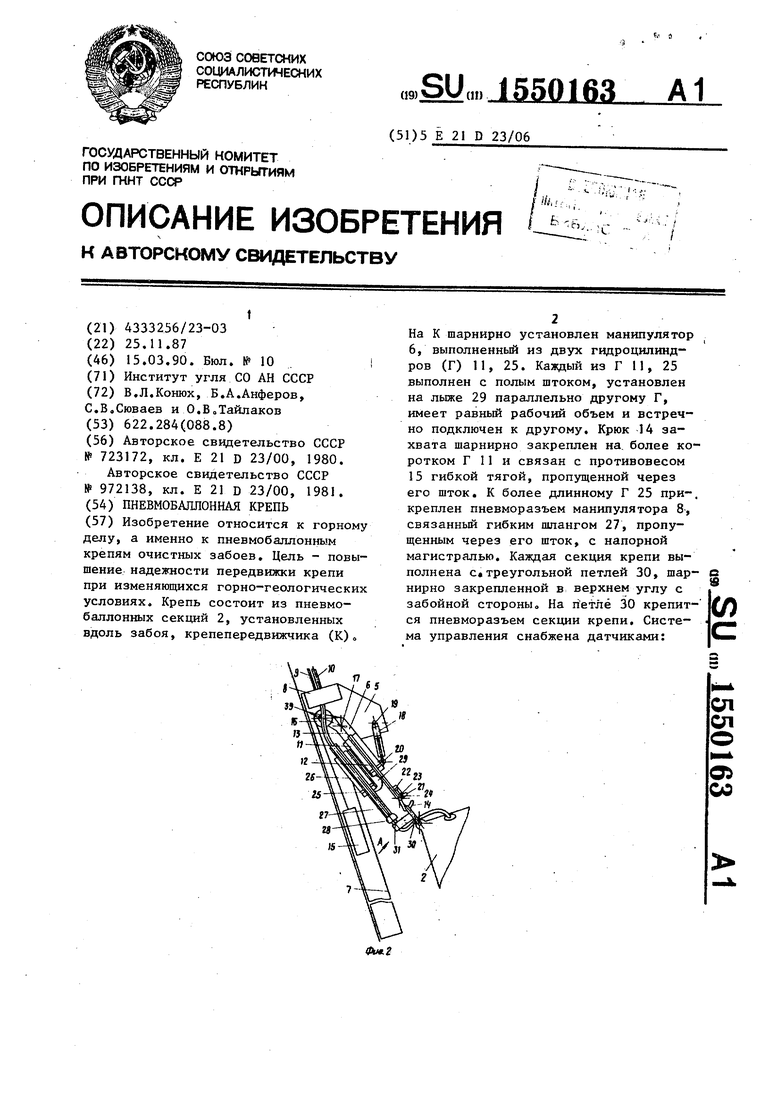
Формула изобретения
крепи, подключенным к приводу поворота крюка, при этом более короткий гидроцилиндр снабжен переключателем пневмоэнергии.
///////////У//////////////////Л
фиг.1
ВидА
4
/////////ЛУ///////Л
фиг.З
JJ J4
Фиг А
| Устройство для передвижки пневмобаллонной крепи | 1978 |
|
SU723172A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Очистной агрегат | 1981 |
|
SU972138A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
