Фиг.1
имеющий ограничитель 5 углового поворота. На кронштейне 3 расположена вставка 7, несущая магнит 13. взаимодействующий с магнитоуправляемым контактом 12, установленным на корпусе 1, когда контролируемая деталь расположена правильно. Когда деталь отсутствует или она установлена неправильно, магнит 13 кронштейна 3 отходит от магнитоуправляемого контакта 12 и размыкает его. 3 ил.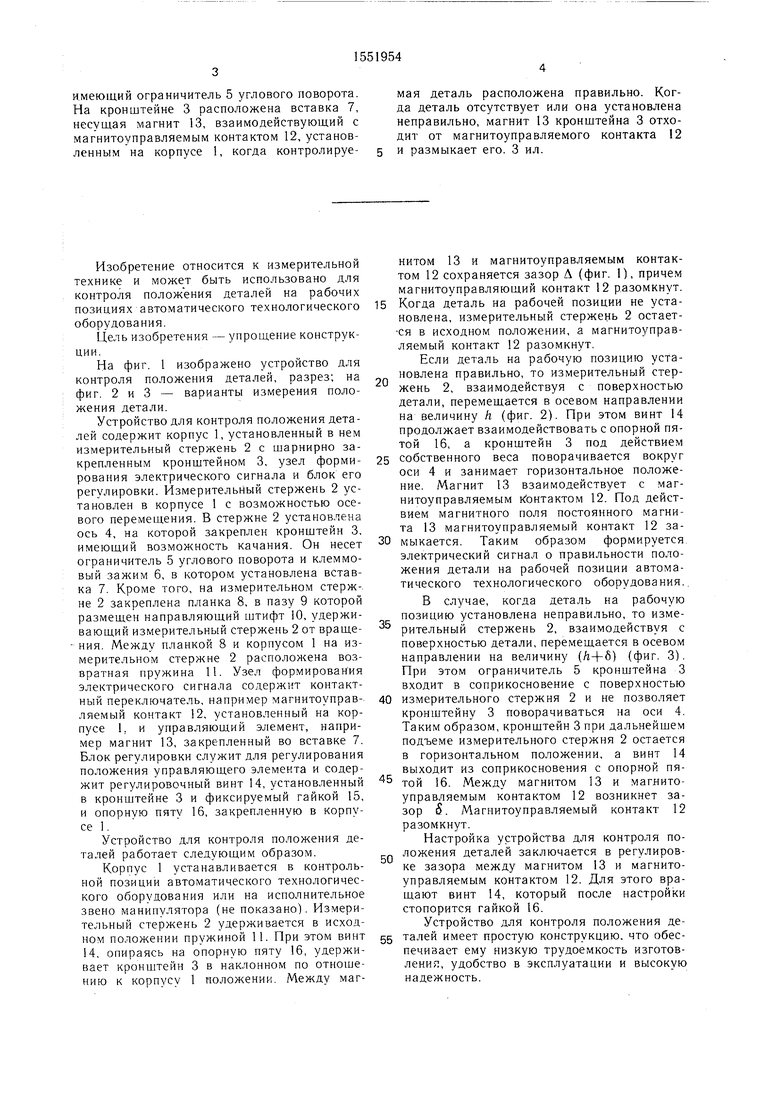
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ И СОВЕРШЕНСТВОВАНИЯ ТЕХНИКИ УДАРА В ТЕННИСЕ | 2007 |
|
RU2347599C1 |
| Устройство для сборки охватываемой и охватывающей деталей типа вал-втулка | 1982 |
|
SU1215255A1 |
| УНИВЕРСАЛЬНЫЙ СЪЕМНЫЙ ПОДЛОКОТНИК | 2010 |
|
RU2434565C1 |
| Гидроцилиндр | 1981 |
|
SU1470993A1 |
| Переключатель на магнитоуправляемых контактах | 1984 |
|
SU1205199A1 |
| Реле контроля скорости | 1987 |
|
SU1408466A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИАМЕТРОВ | 1998 |
|
RU2164003C2 |
| ФОТОЭЛЕКТРИЧЕСКИЙ ИНКРЕМЕНТНЫЙ РАСТРОВЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2003 |
|
RU2231024C1 |
| Система управления автоматической роторной машиной | 1975 |
|
SU763854A1 |
| Сигнализатор уровня | 1982 |
|
SU1147929A1 |
Изобретение относится к измерительной технике и может быть использовано для контроля положения деталей на рабочих позициях автоматического технологического оборудования. Цель изобретения - упрощение конструкции. В корпусе 1 размещен с возможностью осевого перемещения измерительный стержень 2. На нем установлен с возможностью качания кронштейн 3, имеющий ограничитель 5 углового поворота. На кронштейне 3 расположена вставка 7, несущая магнит 13, взаимодействующий с магнитоуправляемым контактом 12, установленным на корпусе 1, когда контролируемая деталь расположена правильно. Когда деталь отсутствует или она установлена неправильно, магнит В кронштейна 3 отходит от магнитоуправляемого контакта 12 и размыкает его. 3 ил.
Изобретение относится к измерительной технике и может быть использовано для контроля положения деталей на рабочих позициях автоматического технологического оборудования.
Цель и шбрегения - упрощение конструкции.
На фиг. 1 изображено устройство для контроля положения деталей, разрез; на фиг. 2 и 3 - варианты измерения положения детали.
Устройство для контроля положения деталей содержит корпус 1, установленный в нем измерительный стержень 2 с шарнирно закрепленным кронштейном 3. узел формирования электрического сигнала и блок его регулировки. Измерительный стержень 2 установлен в корпусе 1 с возможностью осевого перемещения В стержне 2 установим.1, ось 4, на которой закреплен кронштейн 3. имеющий возможность качания. Он несет ограничитель 5 УГЛОВОГО поворота и клеммо- вый зажим 6, в котором установлена вставка 7 Кроме :ого, на измерительном стержне 2 закреплена планка 8. в пазу 9 которой размещен направляющий штифт 10, удерживающий измерительный стержень 2 от вращения. Между планкой 8 и корпусом 1 на измерительном стержне 2 расположена возвратная пружина 11. Узел формирования электрического сигнала содержит контактный переключа (ель, например магнитоуправ- ляемый контакт 12, егановленный на корпусе 1. и управляющий элемент, например магнит 13. закрепленный во вставке 7. Блок регулировки сл житдля регулирования положения управляющего элемента и содержит регулировочный винт 14, установленный в кронштейне 3 и фиксируемый гайкой 15, и опорн ю пяту 16, закрепленную в корпусе 1.
Устройство для контроля положения деталей работает следующим образом.
Корпус 1 устанавливается в контрольной позиции автоматического технологического оборудования ити на исполнительное звено манипулятора (не показано). Измерительный стержень 2 удерживается в исходном положении пружиной 11 При этом винт 14. опираясь на опорную пяту 16, удерживает кронштейн 3 в наклонном по отношению к коппусч 1 положении Между маг0
нитом 13 и магнитоуправляемым контактом 12 сохраняется зазор А (фиг. 1), причем магнитоуправляюший контакт 12 разомкнут.
5 Когда деталь на рабочей позиции не установлена, измерительный стержень 2 остается в исходном положении, а магнитоуправ- ляемый контакт 12 разомкнут.
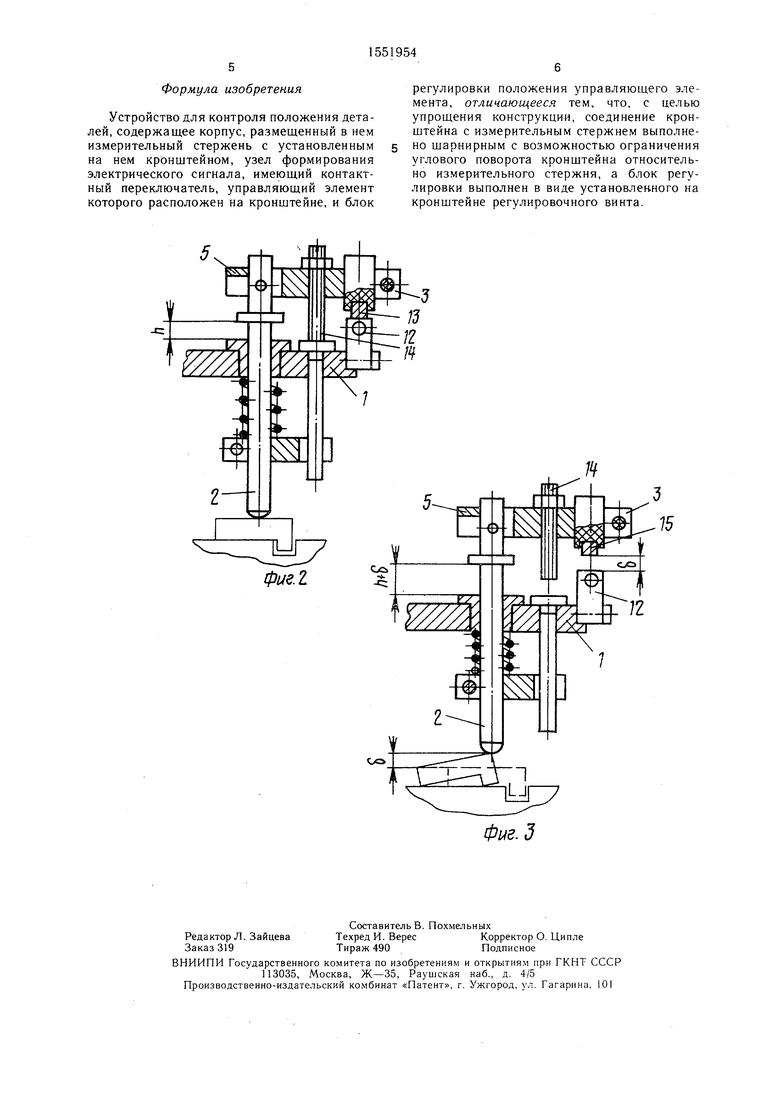
Ксли деталь на рабочую позицию установлена правильно, то измерительный стержень 2, взаимодействуя с поверхностью детали, перемещается в осевом направлении на величину h (фиг 2). При этом винт 14 продолжает взаимодействовать с опорной пятой 16, а кронштейн 3 под действием
5 собственного веса поворачивается вокруг оси 4 и занимает горизонтальное положение. Магнит 13 взаимодействует с маг- ннтоуправляемым Контактом 12. Под действием магнитного поля постоянного магнита 13 магнитоуправляемый контакт 12 за0 мыкается. Таким образом формируется электрический сигнал о правильности положения детали на рабочей позиции автоматического технологического оборудования.
В случае, когда деталь на рабочую позицию установлена неправильно, то измерительный стержень 2, взаимодействуя с поверхностью детали, перемещается в осевом направлении на величину (Л + ft) (фиг. 3). При этом ограничитель 5 кронштейна 3 н.хотит в соприкосновение с поверхностью
0 измерительного стержня 2 и не позволяет кронштейну 3 поворачиваться на оси 4 Таким образом, кронштейн 3 при дальнейшем подъеме измерительного стержня 2 остается в горизонтальном положении, а винт 14 выходит из соприкосновения с опорной пя5 той 16. Между магнитом 13 и магнитоуправляемым контактом 12 возникнет зазор В. Магнитоуправляемый контакт 12 разомкнут
Настройка устройства для контроля поQ ложения деталей заключается в регулировке зазора между магнитом 13 и магнитоуправляемым контактом 12. Для этого вращают винт 14, который после настройки стопорится гайкой 16
Устройство для контроля положения де5 талей имеет простую конструкцию, что обеспечивает ему низкую трудоемкость изготовления, удобство в эксплуатации и высокую надежность.
5
Формула изобретения
Устройство для контроля положения деталей, содержащее корпус, размещенный в нем измерительный стержень с установленным на нем кронштейном, узел формирования электрического сигнала, имеющий контактный переключатель, управляющий элемент которого расположен на кронштейне, и блок
регулировки положения управляющею элемента, отличающееся тем, что, с целью упрощения конструкции, соединение кронштейна с измерительным стержнем выполнено шарнирным с возможностью ограничения углового поворота кронштейна относительно измерительного стержня, а блок регулировки выполнен в виде установленного на кронштейне регулировочного винта.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Н | |||
| Бегляков 4361572/25-28 11.01.88 23.03.90 | |||
| Бюл | |||
| № Д | |||
| А | |||
| Устройство для извлечения срубленного леса с лесосеки | 1921 |
|
SU531A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Марков П | |||
| Н., Машинистов В | |||
| М | |||
| и Этин- гоф М | |||
| И | |||
| Приспособление к индикатору для определения момента вспышки в двигателях | 1925 |
|
SU1969A1 |
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
