ел ел to
о ьо
со
Изобретение относится к балансиовочной технике и мояет быть использовано при балансировке роторов разичных машин, а также прецизионных « с станков.
Цель изобретения - расширение частотного диапазона и повышение безаварийности за счет постепенного наращивания скорости вращения при ю постоянном контроле параметров дисбаланса.
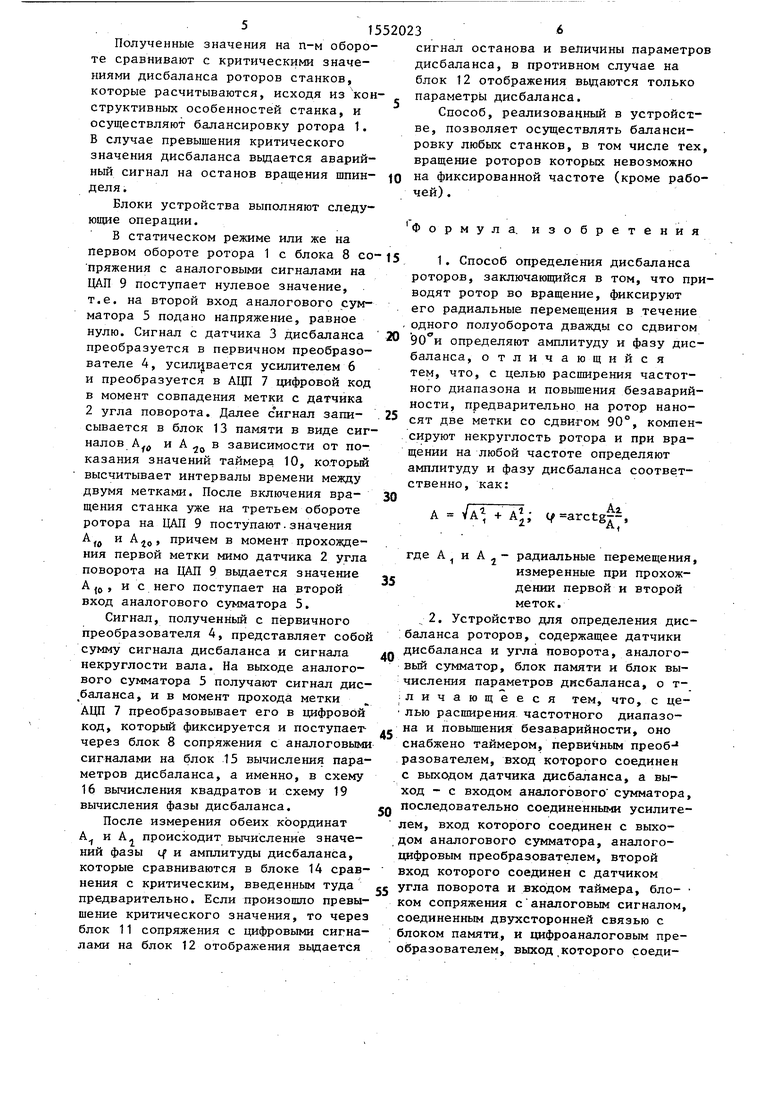
На фиг.1 изображена схема реализации способа, на фиг.2 - блок-схема устройства, реализующего способ; |5 на фиг.З и 4 - алгоритмы работы устройства.
Способ определения дисбаланса роторов заключается в том, что на поверхность ротора наносят две метки 20 со сдвигом 90°, в статике определяют и компенсируют некруглость ротора, приводят последний во вращение, фиксируют радиальные перемещения ротора при прохождении меток и на любой 25 частоте вращения определяют амплитуду и фазу дисбаланса, соответственно, как
А
А , if arctgr-,
где А,, и А г - радиальные перемещения
ротора при прохождении
первой и второй меток.
Устройство для определения дисба
ланса роторов содержит предназначенные для взимодействия с ротором 1 датчик 2 угла поворота и датчик 3 дисбаланса, последовательно соединенные первичный преобразователь 4, вход которого соединен с выходом датчика 3 дисбаланса, аналоговый сумматор 5, усилитель 6, аналого-цифровой преобразователь 7 (АЦП), блок 8 сопряжения с аналоговым сигналом и цифроана- лотовый преобразователь (ЦАП) 9., выход которого соединен с вторым входом аналогового сумматора 5, последовательно соединенные таймер 10, вход которого соединен с выходом датчика 2 угла поворота и вторым входом АЦП 7, блок 11 сопряжения с цифровыми сигналами и блок 12 отображения, блок
13памяти, соединенный двухсторонними связями с блоком 8 сопряжения с аналоговым сигналом и с блоком 1 1 сопряжения
с цифровыми сигналами, соединенный двухсторонней связью с последним блок
14сравнения и блок 15 вычисления па
с
5
0 5
0
35
,Q дз п
раметров дисбаланса, выполненный в виде последовательно соединенных схемы 16 вычисления квадрата, вход которой соединен с вторым выходом блока 8 сопряжения с аналоговым сигналом, сумматора 17 и схемы 18 вычисления амплитуды дисбаланса, выход которой соединен с вторым входом блока 11 сопряжения с цифровыми сигналами, и соединенной двухсторонней связью с третьим входом последнего, схемы 19 вычисления фазы дисбаланса, вход которой соединен с третьим выходом блока 8 сопряжения с аналоговым сигналом.
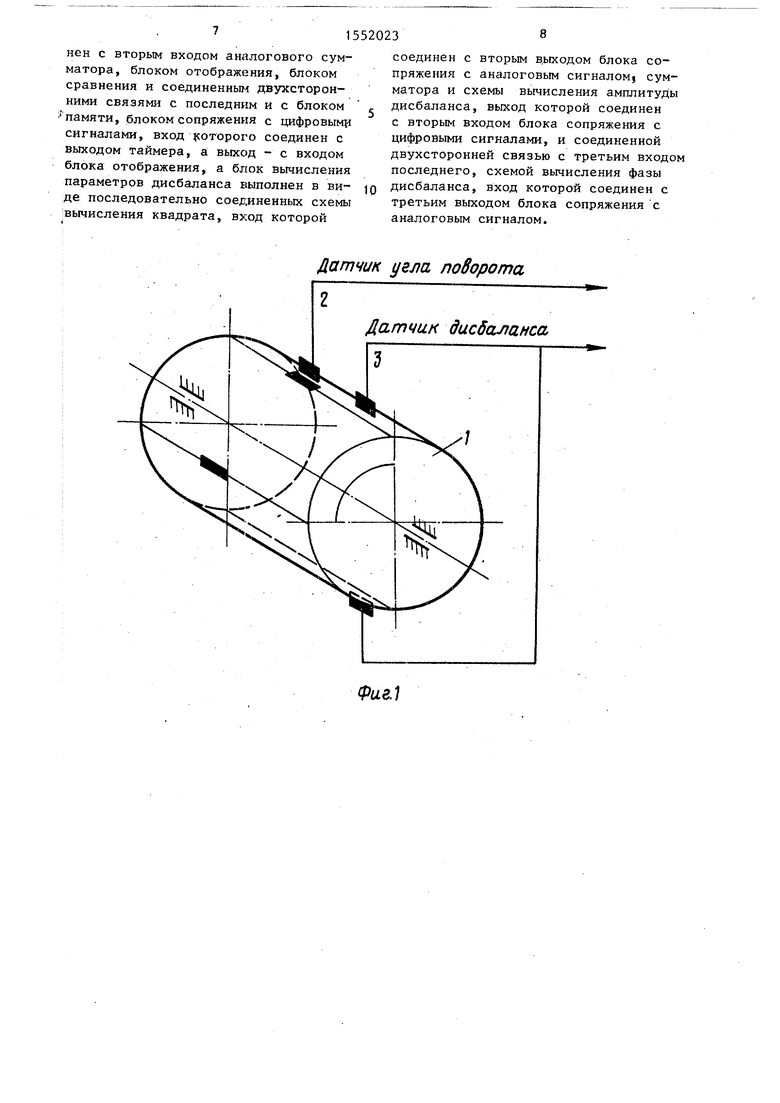
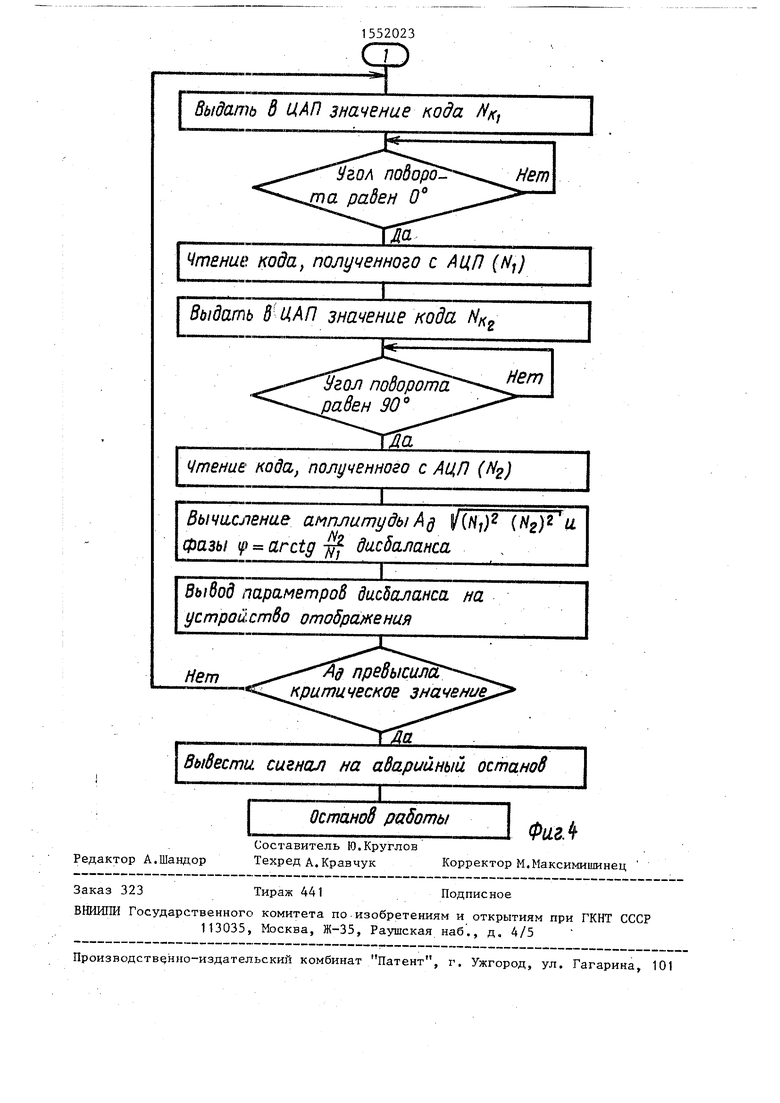
Устройство реализует способ по приведенным алгоритмам (фиг.3,4) согласно последовательности операций.
Наносят по окружности ротора 1 две метки со сдвигом 90°; датчики 2 и 3 угла поворота и дисбаланса устанавливают с возможностью считывания информации с ротора 1, а именно, на одной оси, перпендикулярно оси вращения объекта, в статическом режиме (вручную поворачивая ротор I или же на первом обороте) в моменты фиксации меток датчиком 2 угла поворота с помощью датчика 3 дисбаланса измеряют и запоминают, значения амплитуд в обоих точках А и . Чтобы определить которая из точек 1 или 2 зафиксируется первой, одновременно с определением амплитуд сигналов измеряют время от момента фиксации первой метки до момента фиксации второй метки 2,, затем от второй до первой -ег , затем определяют, если Ј,Ј,, то первая метка X, вторая Y, и, наоборот. Это необходимо для того, чтобы обусловить однозначность последующих вычислений. После измерения А10 и Аго эти значения компенсируются.
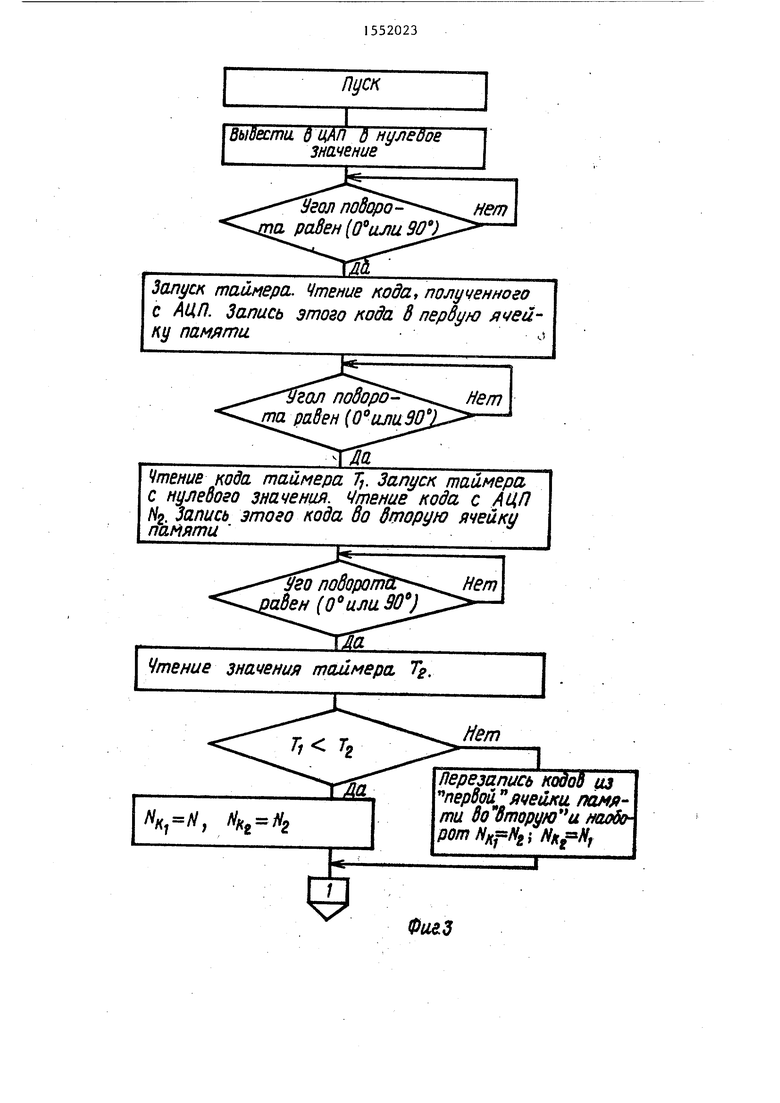
Далее вращают ротор 1 и на последующих оборотах его вращения, при разгоне или в установившемся режиме, измеряют сигналы в точках тем же методом, что и в статическом режиме,получая параметры А, и Аа. Затем определяют дисбаланс по выражениям
if- arctg| ; A
VA + A ,
где I/ - угол дисбаланса1,
А - величина дисбалансаj AI,
A.J- значения амплитуд сигналов, измеренных в динамическом режиме, соответственно, в точках 1 и 2.
Полученные значения на n-м обороте сравнивают с критическими значениями дисбаланса роторов станков, которые расчитываются, исходя из конструктивных особенностей станка, и осуществляют балансировку ротора 1. В случае превышения критического значения дисбаланса выдается аварийный сигнал на останов вращения шпинделя.
Блоки устройства выполняют следующие операции.
В статическом режиме или же на первом обороте ротора 1 с блока 8 со- пряжения с аналоговыми сигналами на ЦАП 9 поступает нулевое значение, т.е. на второй вход аналогового сумматора 5 подано напряжение, равное нулю. Сигнал с датчика 3 дисбаланса преобразуется в первичном преобразователе 4, усиливается усилителем 6 и преобразуется в АЦП 7 цифровой код в момент совпадения метки с датчика 2 угла поворота. Далее сигнал записывается в блок 13 памяти в виде сиг
налов А
ю
и
в
зависимости от по
казания значений таймера 10, который высчитывает интервалы времени между двумя метками. После включения вра- щения станка уже на третьем обороте ротора на ЦАП 9 поступают.значения Afo и , причем в момент прохождения первой метки мимо датчика 2 угла поворота на ЦАП 9 выдается значение А 0 , и с него поступает на второй вход аналогового сумматора 5.
Сигнал, полученный с первичного преобразователя 4, представляет собой сумму сигнала дисбаланса и сигнала некруглости вала. На выходе аналогового сумматора 5 получают сигнал дис- аланса, и в момент прохода метки АЦП 7 преобразовывает его в цифровой код, который фиксируется и поступает- через блок 8 сопряжения с аналоговыми сигналами на блок 15 вычисления параметров дисбаланса, а именно, в схему 16 вычисления квадратов и схему 19 вычисления фазы дисбаланса.
После измерения обеих координат А и А, происходит вычисление значений фазы q и амплитуды дисбаланса, которые сравниваются в блоке 14 сравнения с критическим, введенным туда предварительно. Если произошло превышение критического значения, то через блок 11 сопряжения с цифровыми сигналами на блок 12 отображения выдается
0
5
0
5
0
сигнал останова и величины параметров дисбаланса, в противном случае на блок 12 отображения выдаются только параметры дисбаланса.
Способ, реализованный в устройстве, позволяет осуществлять балансировку любых станков, в том числе тех, вращение роторов которых невозможно на фиксированной частоте (кроме рабочей).
Формула изобретения
1. Способ определения дисбаланса роторов, заключающийся в том, что приводят ротор во вращение, фиксируют его радиальные перемещения в течение одного полуоборота дважды со сдвигом определяют амплитуду и фазу дисбаланса, отличающийся тем, что, с целью расширения частотного диапазона и повышения безаварийности, предварительно на ротор наносят две метки со сдвигом 90°, компенсируют некруглость ротора и при вращении на любой частоте определяют амплитуду и фазу дисбаланса соответственно, как:
А - VA + А.
c/ arctgT-, Ai
где А . и
А1радиальные перемещения, измеренные при прохождении первой и второй меток.
2. Устройство для определения дисбаланса роторов, содержащее датчики дисбаланса и угла поворота, аналоговый сумматор, блок памяти и блок вычисления параметров дисбаланса, о т- личающееся тем, что, с целью расширения частотного диапазона и повышения безаварийности, оно снабжено таймером, первичным преоб-1 разователем, вход которого соединен с выходом датчика дисбаланса, а выход - с входом аналогового сумматора, последовательно соединенными усилителем, вход которого соединен с выходом аналогового сумматора, аналого- цифровым преобразователем, второй вход которого соединен с датчиком угла поворота и входом таймера, бло- ком сопряжения с аналоговым сигналом, соединенным двухсторонней связью с блоком памяти, и цифроаналоговым преобразователем, выход которого соединен с вторым входом аналогового сумматора, блоком отображения, блоком сравнения и соединенным двухсторонними связями с последним и с блоком памяти, блоком сопряжения с цифровыми сигналами, вход которого соединен с выходом таймера, а выход - с входом блока отображения, а блок вычисления параметров дисбаланса выполнен в виде последовательно соединенных схемы вычисления квадрата, вход которой
520238
соединен с вторым выходом блока сопряжения с аналоговым сигналом сумматора и схемы вычисления амплитуды дисбаланса, выход которой соединен с вторым входом блока сопряжения с цифровыми сигналами, и соединенной двухсторонней связью с третьим входом последнего, схемой вычисления фазы дисбаланса, вход которой соединен с третьим выходом блока сопряжения с аналоговым сигналом.
10
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ ДИСБАЛАНСА | 1992 |
|
RU2030724C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИСБАЛАНСА | 1994 |
|
RU2078320C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН АППАРАТУРЫ ЭЛЕКТРОННОЙ | 2002 |
|
RU2225013C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИСБАЛАНСА РОТОРОВ | 2016 |
|
RU2643170C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2006886C1 |
| Устройство измерения параметров дисбаланса | 1990 |
|
SU1795318A1 |
| Преобразователь "Угол-Код" индукционного датчика угла | 2016 |
|
RU2649033C1 |
| ВОЛЬТАМПЕРОМЕТРИЧЕСКИЙ АНАЛИЗАТОР | 1999 |
|
RU2155956C1 |
| МИКРОПРОЦЕССОРНЫЙ ВОЛЬТАМПЕРОМЕТРИЧЕСКИЙ АНАЛИЗАТОР ТЯЖЕЛЫХ МЕТАЛЛОВ АВС-1 | 1995 |
|
RU2092830C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ АНТЕННОГО ПОСТА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2587715C1 |
Изобретение относится к балансировочной технике. Цель изобретения - расширение частотного диапазона и повышение безаварийности за счет постоянного наращивания скорости вращения. На ротор 1 наносят две метки со сдвигом 90°. В статике компенсируют некруглость с помощью аналогового сумматора 5, приводят ротор 1 во вращение, сигналы с датчиков 2 и 3 угла поворота и дисбаланса, преобразуют в цифровую форму и с помощью блока 15 вычисления параметров дисбаланса определяют амплитуду и фазу последнего, выводя данные на блок 12 отображения. При превышении амплитуды дисбананса критического значения, хранящегося в блоке 14 сравнения, на блоке 12 отображения выводится сигнал на остановку. 2 с.п. ф-лы, 4 ил.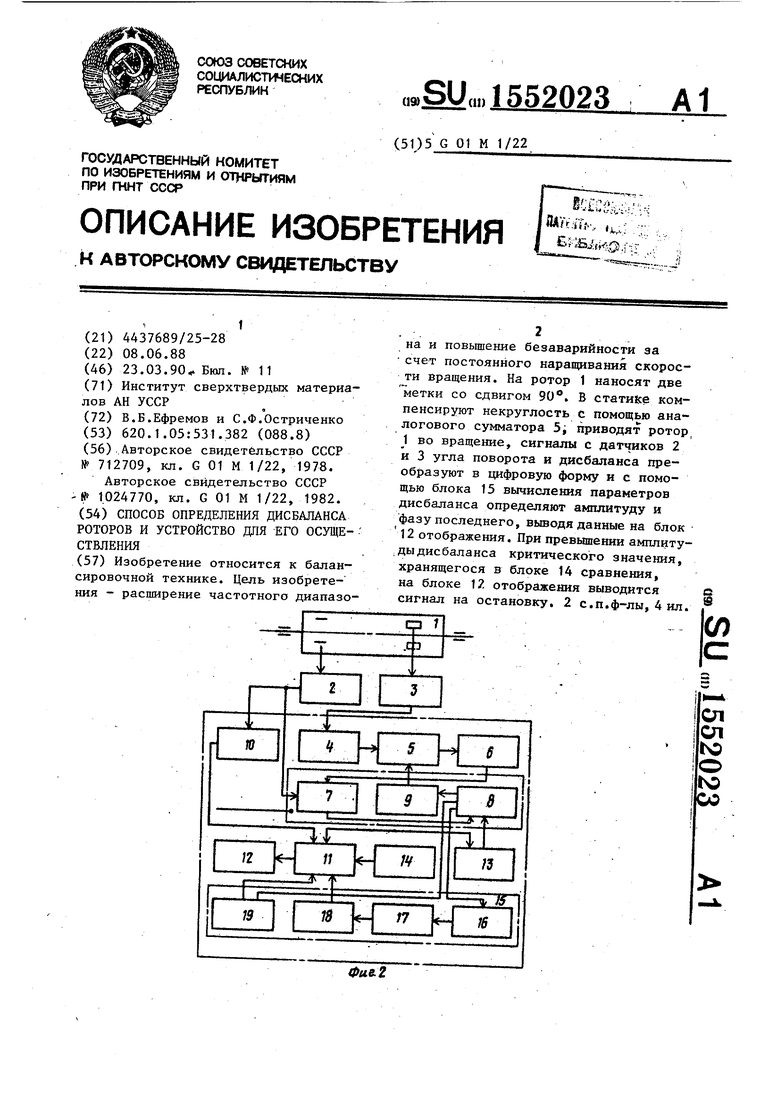
Датчик уела поворота
Датчик дисбаланса
Фиг.1
ПуСК
I ,
Вывести д ЦАП д нулевое значение
Запуск таймера. Чтение кода, полученного с Аил. Запись этого кода 8 первую ячейку памятии
Чтение кода таймера Tj. Запуск таймера с нулеВого значения. Чтение кода с АЦП /У2 запись этого кода 8о Вторую ячейку памяти
Seo лоборотЗг Нет (0°или90 )
V, г
Нет
1
Перезапись кодоВ из перВой ячейки памяти Во о тору/о и наоборот i ,
Фи&З
Выдать 8 UAH значение кода /Уд-,
Чтение, кода, полученного с АЦП (tfj)
Выдать 5 ЦАП значение кода МКг
Чтение кода, полученного с АЦП (N2)
Вычисление амплитуды Ag УКн,) (А/г)2 а фазы у arctg jfc дисбаланса
Вывод параметров дисбаланса на устройство отображения
Нет
д превысила критическое значение.
Вывести, сигнал на аварийный, останов
Останов работы
Редактор А.Шандор
Составитель Ю.Круглов
Техред А.Кравчук Корректор М.Максимишинец
Заказ 323
Тираж 441
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб ., д. 4/5
1552023
твтт
/
Ла
До.
ФагА
Подписное
| Устройство для измерения прогиба ротора | 1978 |
|
SU712709A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
