Изобретение предназначено для ис-, пользования в электротехнической аппаратуре различного назначения и, в частности, может быть использовано в системах автоматического управления для вычисления результирующего вектора по информации о его орготональных проекциях, получаемой с датчиков первичной информации.
Целью изобретения является повышение точности работы устройства.
На чертеже представлена блок-схема устройства .
Устройство содержит первый 1 и второй 2 блоки выделения модуля, первый 3 и второй 4 сумматоры с дифференциальными входами, третий блок 5 выделения модуля, инвертор 6, блоки 7 коррекции, каждый из которых состоит из последовательно соединенных трехвходового сумматора 8 и элемента 9 с односторонней проводимостью.
Устройство работает следующим образом.
На входы первого 1 и второго 2 бло-. ков выделения модуля поступают соответственно входные сигналы X и Y,
модули которых затем поступают на первый и второй входы первого сумматора 3 и складываются с коэффициентами усиления К,. Разность модулей (|х| -lYl) входных сигналов с выхода второго сумматора 4 с дифференциальными входами поступает на вход третьего блока 5 выделения модуля и преобразуется на его выходе в модуль разности модулей Xi - lYl | электрических сигналов, который поступает на третий вход первого сумматора 3 и складывается с коэффициентом усиления К. Кроме того, модули |х| и |Y| входных сигналов поступают на первый и второй входы сумматора 8 блока 7 коррекции и складываются с коэффициентом усиления, равным 1, а модуль разности модулей || XI - |YI | с выхода третьего блока 5 выделения модуля через инвертор 6 поступает на третий вход сумматора 8 блока 7 коррекции и складывается с коэффициентом усиления К. Таким образом, на выходе сумматора 8 блока 7 коррекции формируется сигнал, пропорциональный выражению
J|XI+|Y| - K4 ||x|-|Yl|. (1)
Элемент 9 с односторонней проводимостью блока 7 коррекции пропуска
5 0
5
5 0 5 0
5
ет только сигнал положительной полярности, следовательно, на выходе блока коррекции сигнал появляется при условии
||X|+|Y||i K ||X|-|Y||.
В этом случае сигнал с выхода блока 7 коррекции поступает на четвертый вход первого сумматора 3 и суммируется с коэффициентом, равным Kj. Таким образом, при наличии одного блока коррекции на выходе первого сумматора 3 реализуется вычисление функции в соответствии с выражениями
Z К,(|х| + )+Кг | X|-|Y||
при (|х| + IY) K4||xl-|Y|1;
Z (K1+KJ)(|X| + |Y|)+(K1-K,-K4) ||X|-|Y||;(2)
при (|X| + |Y|)-K4|1X|-|Y||.
Как видно из выражения (2), оба эти уравнения представляют уравнения прямой линии, но с разными коэффициентами. Таким образом, обеспечивается кусочно-линейная аппроксимация нелинейной функции двумя прямыми, т.е. подключение блока коррекции позволяет при коэффициентах К 0,5903, Kt 0,3997, К, 0,10962 и К4 2,333 уменьшить методическую погрешность вычисления функции до ±1%.
При подключении второго блока коррекции аппроксимация осуществляется тремя прямыми и методическая погрешность вычисления функции Z -Jx7+Y2 . уменьшается до +0,5% и т.д.
Методическая погрешность вычисления функции Z устройством зависит от соотношения величин X и Y и не превышает 1%.
Формула изобретения
Устройство для вычисления функции Z , содержащее три блока выделения модуля, причем выходы первого и второго блоков выделения модуля соединены соответственно с первым и вторым входом первого сумматора и подключены соответственно к первому и второму дифференциальным входам второго сумматора, выход которого через третий блок выделения модуля подключен к третьему входу первого сумматора, выход которого является выходом уст515522046
ройства, отличающеесярекции, а выход третьего блока выделетем, что, с целью повышения точности, ния модуля через инвертор подключен
в него введены инвертор и п (гдек третьим входам трехвходовых суммап 1,2,...) блоков коррекции, каж-торов блоков коррекции, выходы эледый из которых содержит последователь-ментов с односторонней проводимостью
но соединенные трехвходовый сумматорблоков коррекции соединены с сооти элемент с односторонней проводи-ветствующими входами первого суммамостью, выходы первого и второго бло-тора, входы первого и второго блоков
ков выделения модуля подключены соот- ювыделения модуля являются информациветственно к первым и вторым входамонными входами устройства, трехвходовых сумматоров блоков кор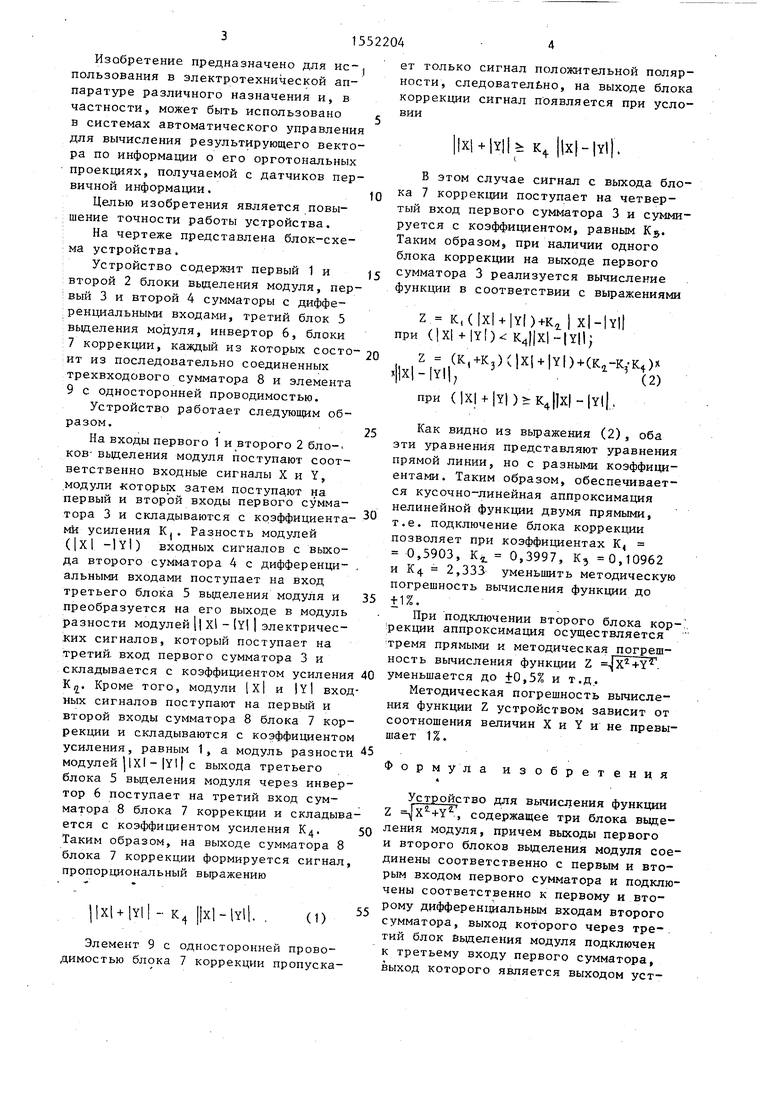
Изобретение относится к автоматике и вычислительной технике и может найти применение в электротехнической аппаратуре различного назначения, в частности в системах автоматического управления. Цель изобретения - повышение точности работы устройства. Устройство содержит первый 1 и второй 2 блоки выделения модуля, первый сумматор 3, второй сумматор 4 с дифференциальными входами, третий блок 5 выделения модуля, инвертор 6, блоки 7 коррекции, каждый из которых состоит из последовательно включенных трехвходового сумматора 8 и элемента 9 с односторонней проводимостью. Введение в устройство инвертора 6 и блоков 7 коррекции позволяет уменьшить методическую погрешность устройства. 1 ил.
| Устройство для извлечения корня заданного порядка | 1974 |
|
SU482761A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для измерения модуля вектора рассогласования двух процессов | 1981 |
|
SU993277A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
