Фие.1
Изобретение относится к технике магнитной записи, а именно к устройствам подачи магнитных головок
по заданным адресам в накопителях на магнитных дисках.
Целью изобретения является повышение точности формирования сигнала коррекции скорости перемещения.
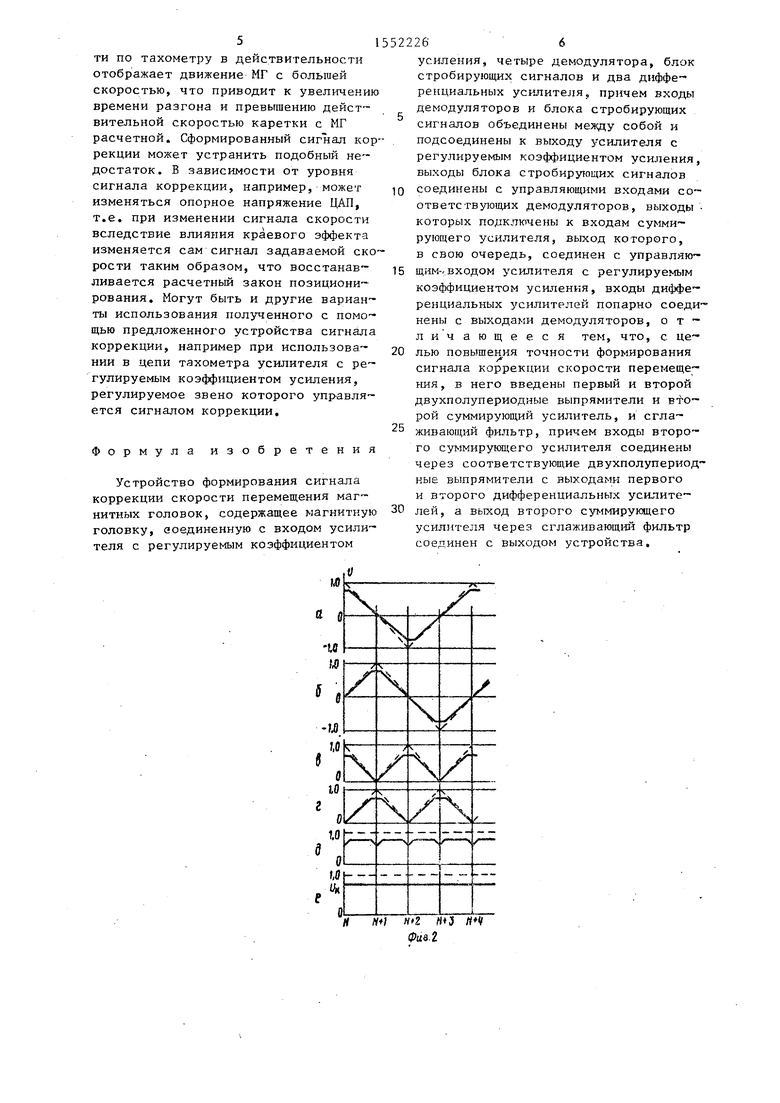
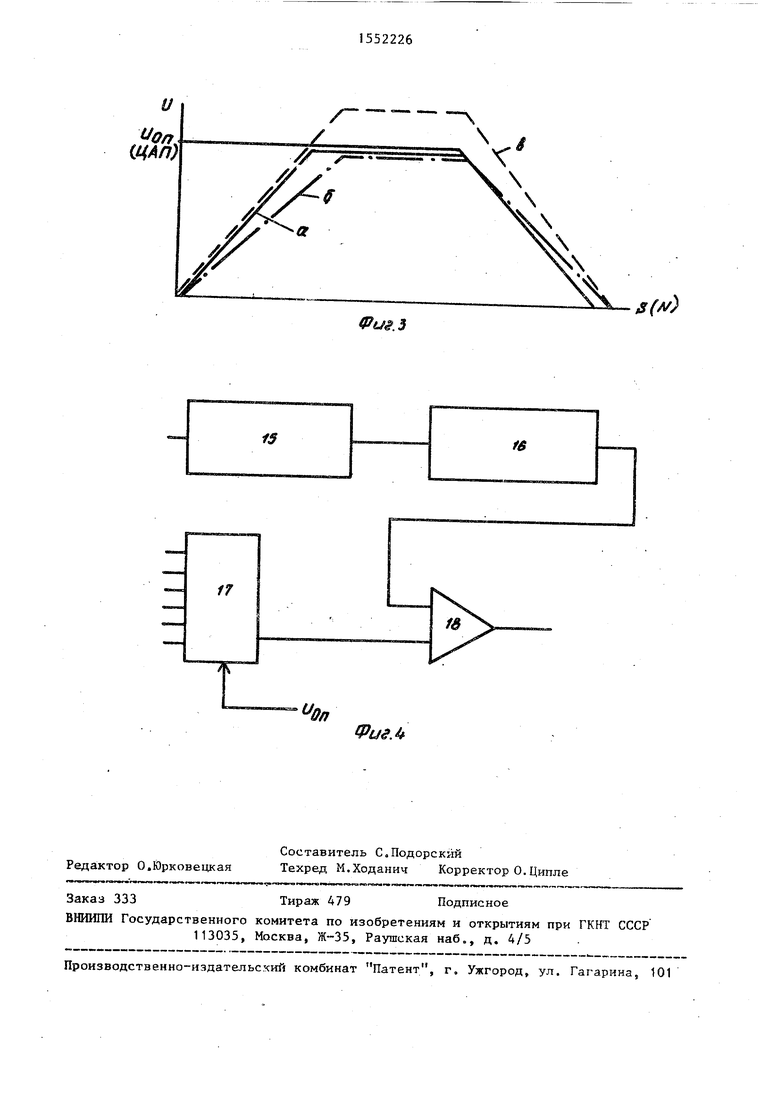
На фиг.1 приведена функциональная схема устройства формирования сигнала коррекции скорости перемещения магнитных головок; на фиг.2 - временные диаграммы, поясняющие его работу; на фиг.З ™ графики влияния краевого эффекта магнитных г ловок ча сигнал с выхода устройств;; позиционирования магнитных головок (а - ; асчетпая скорость; б - скорое 1 h по тахометру; и - действительная скорость); на фиг.4 - функциональная схема устройства позиционирования магнитных головок.
Устройство содержит магнитную головку 1 (МГ), соединенную с входом усилителя 2 с регулируемым коэффи- ЦИРНТОМ усиления, выходом соединенного с блоком 3 стробируклцих сигна- лов и демодуляторами 4-7 каждый выход блока 3 стробирующих сигналов соединен с соответствующим управляющим входом демодуляторов 4-7, выходы которых соединены с входами суммирующего усилителя 8, выходом соединенного с управляющим в-одом усилителя 2 с регулируемым ко ффициен™ том усиления, выходы демодуляторов 4, 5 и 6, 7 попарно соединены с входами дифференциальных усилителей 9 и 10, выходы которых через двухполу- периодные выпрямители 11 и I2 соединены с входами суммирующего усилителя 13, выход которого подключен к сглаживающему фильтру 14. Устройство позиционирования (фиг.4) содержит формирователь 13 сигнала позиции, тахометр 16, цифроаналоговый преобразователь (ЦАП) 17 и дифференциальный усилитель 18.
Устройство работает следующим образом.
При пересечении дорожек с серво- сигналами магнитная головка 1 последовательно считывает сигналы, которые поступают на усилитель 2 с регулируемым коэффициентом усиления, где усиливаются до уровня, достаточного для работы блока 3 стробирующих сигналов, который выделяет из воспроиз522264
водимого сигнала синхроимпульсы и формирует последовательности импульсов для селективного анализа амплитуды позиционных импульсов демодуляторами 4-7. Сигналы, пропорциональные амплитуде позиционных импульсов, с выходов демодуляторов 4-7 поступают на входы суммирующего усилите- ля 8, в зависимости от результата суммирования изменяется коэффициент усиления усилителя 2 с регулируемым коэффициентом усиления. С демодуляторов 4 и 5 сигналы поступаю на
,г входы дифференциального усилителя 9, а с демодуляторов 6 и 7 - на входы дифференциального усилителя 10. На выходах дифференциальных усилителей 9 и 10 формируются сигналы положе, ния магнитной головки на дорожке
(фиг.2а, б), соответствующие разности амплитуд на выходах демодуляторов, причем сигналы на выходах усилителей 9 и 10 сдвинуты на 90 отно25 сительно друг друга. Сигналы положения выпрямляются двухполупефиодными выпрямителями 11 и 12 (фиг.2в, г) и поступают на входы суммирующего усилителя 13, сигнал (фиг.2д) с выхода которого сглаживается фильтром 14, на выходе которого формируется сигнал (фиг.2е), пропорциональный абсолютному значению сигналов положения. Прерывистой линией на фиг.2 показан сигнал при условии равенства ширины
35 зазора МГ шагу дорожек. Сплошной линией показан сигнал при условии, что эффективная ширина зазора МГ больше шага дорожек.
Сформированный на выходе устройства сигнал возможно использовать для коррекции сигнала скорости в устройствах для позиционирования МГ. На фиг.З показано влияние краевого эффекта МГ (эффективная ширина зазора МГ больше ширины дорожки) на сигнал с выхода тахометра устройства позиционирования магнитных головок (фиг.4). Устройство позиционирования рассчитывают таким образом., что разгон под полным током карегки с МГ происходит до момента, когда сигнал с выхода тахометра сравняемся по уровню с уровнем задаваемой скорости с ЦАП. Под влиянием краевого эффекта происходит уменьшение крутизны наклона сигнала позиции и, следовательно, уменьшение сигнала скорости. Таким образом, неизменная величина скорое-
30
40
45
50
55
51
ти по тахометру в действительности отображает движение МГ с большей скоростью, что приводит к увеличению времени разгона и превышению действительной скоростью каретки с МГ расчетной. Сформированный сигнал коррекции может устранить подобный недостаток. В зависимости от уровня сигнала коррекции, например, может изменяться опорное напряжение ЦАП, т.е. при изменении сигнала скорости вследствие влияния краевого эффект изменяется сам сигнал задаваемой скорости таким образом, что восставав- ливается расчетный закон позиционирования. Могут быть и другие варианты использования полученного с помощью предложенного устройства сигнала коррекции, например при использовании в цепи тахометра усилителя с регулируемым коэффициентом усиления, регулируемое звено которого управляется сигналом коррекции.
Формула
и з о б р е
е н и я
Устройство формирования сигнала коррекции скорости перемещения магнитных головок, содержащее магнитную головку, соединенную с входом усилителя с регулируемым коэффициентом
522266
усиления, четыре демодулятора, блок стробирующих сигналов и два дифференциальных усилителя, причем входы демодуляторов и блока стробирующих
Јj
сигналов объединены между собой и подсоединены к выходу усилителя с регулируемым коэффициентом усиления, выходы блока стробирующих сигналов
Ю соединены с управляющими входами соответствующих демодуляторов, выходы которых подключены к входам суммирующего усилителя, выход которого, в свою очередь, соединен с управляю-
15 щнм-. входом усилителя с регулируемым коэффициентом усиления, входы дифференциальных усилителей попарно соеди™ йены с выходами демодуляторов, отличающееся тем, что, с це-
20
лью повышения точности формирования
сигнала коррекции скорости перемещения , в него введены первый и второй двухполупериодные выпрямители и второй суммирующий усилитель, и сглажипающий фильтр, причем входы второго суммирующего усилителя соединены через соответствующие двухполупериод- ныс выпрямители с выходами первого и второго дифференциальных усилите-
лей, а выход второго суммирующего усилителя через сглаживающий фильтр i ор-тинен с выходом устройства.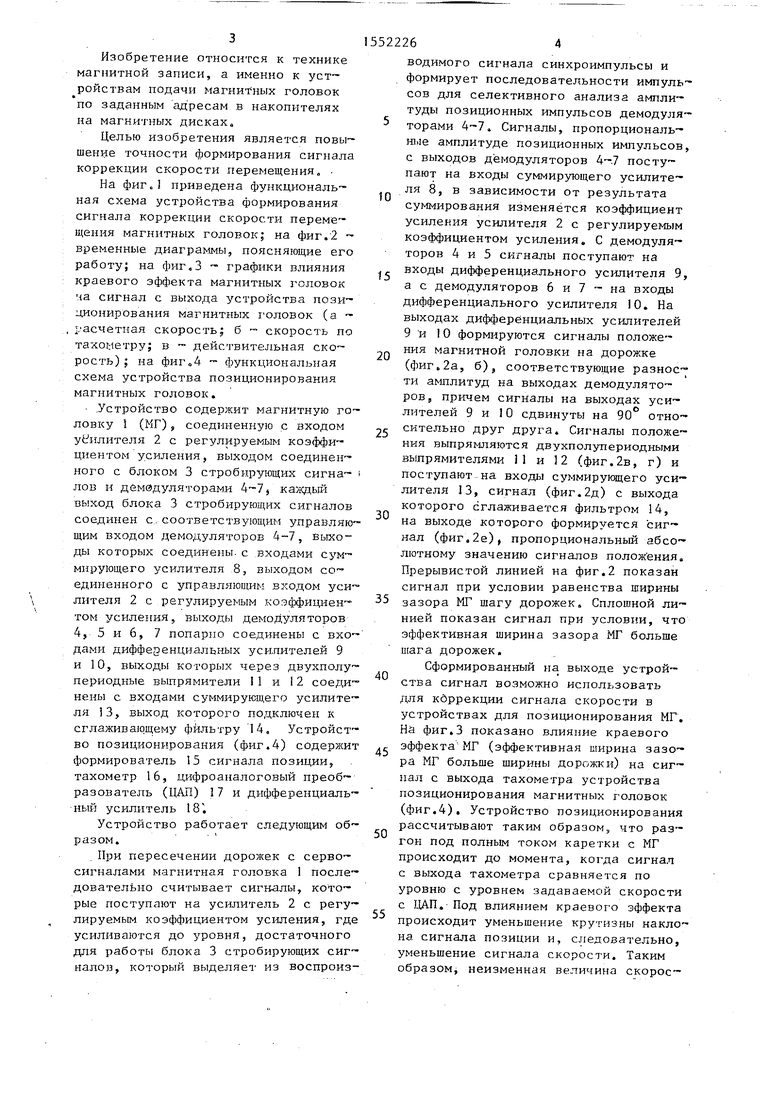
| название | год | авторы | номер документа |
|---|---|---|---|
| Цепь автоматической регулировки усиления канала воспроизведения сервоинформации устройства позиционирования магнитных головок | 1987 |
|
SU1478251A1 |
| Устройство для формирования сигнала скорости перемещения магнитных головок | 1988 |
|
SU1601638A1 |
| Устройство формирования сигнала положения системы позиционирования | 1985 |
|
SU1314382A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЭЛЕКТРОННЫХ СИГНАЛОВ ЦВЕТНОГО ИЗОБРАЖЕНИЯ ОБЪЕКТОВ (ВАРИАНТЫ) | 2003 |
|
RU2258319C2 |
| Весовой дозатор непрерывного действия | 1990 |
|
SU1742630A2 |
| Устройство для формирования сигнала скорости перемещения магнитных головок | 1986 |
|
SU1510003A1 |
| Устройство для формирования сигнала скорости перемещения магнитных головок | 1988 |
|
SU1578764A1 |
| Устройство для измерения линейной скорости перемещения блока магнитных головок накопителя на дисках | 1977 |
|
SU691759A1 |
| Электронный тахометр для накопителя на магнитных дисках | 1985 |
|
SU1269202A1 |
| Устройство для коррекции сигнала воспроизведения | 1978 |
|
SU686068A1 |
Изобретение относится к технике магнитной записи, а именно к устройствам подачи магнитных головок по заданным адресам в накопителях на магнитных дисках. Цель изобретения - повышение точности формирования сигнала коррекции скорости перемещения магнитных головок. Магнитная головка 1 соединена с входом усилителя 2 с регулируемым коэффициентом усиления, выход которого подключен к группе демодуляторов 4 - 7. Управляющие входы демодуляторов 4 - 7 соединены с выходами блока 3 стробирующих сигналов. В устройство, содержащее также суммирующий усилитель 8 и дифференциальные усилители 9, 10, введены двухполупериодные выпрямители 11, 12, суммирующий усилитель 13 и сглаживающий фильтр 14. 4 ил.
и я
а
и. w
о ю
5
в
У
/
ЧУ
mi «о Фив 2
15
UD
з(У
Фиг.з
16
Фиг.ь
