(21)4383515/24-07
(22).25.02.88
(46). 23.03. 90. Бкш. № 11
(71)Ульяновский завод низковольтной аппаратуры Контактор
(72)П.В.Катасонов и С.С.Обухов (53) 621.316.54(088.8)
(56) Авторское свидетельство СССР 1259348, кл. Н 01 Н 3/28, Н 01 Н 3/42, 1985.
Авторское свидетельство СССР 180229, кл. G 05 G 7/02, 1964.
(54) ЭЛЕКТРОМЕХАНИЧЕСКИЙ УДАРОВИБРО- СТОЙКИЙ ПРИВОД
(57) Изобретение относится к электротехнике. Целью изобретения является уменьшение габаритов- и материалоем-. кости. Привод содержит электромагниты (ЭМ) 1,2, соединенные с целью питания через полупроводниковые диоды, ведущее кольцо 6 фрикционно-клинового механизма, пружину (П) 7, вал 8. Питание на ЭМ подается в разные полупериоды переменного тока. ЭМ 1 накапливает энергию в П 7, ЭМ 2 поворачивает вал 8 суммарным с П 7 усилием. 3 ил.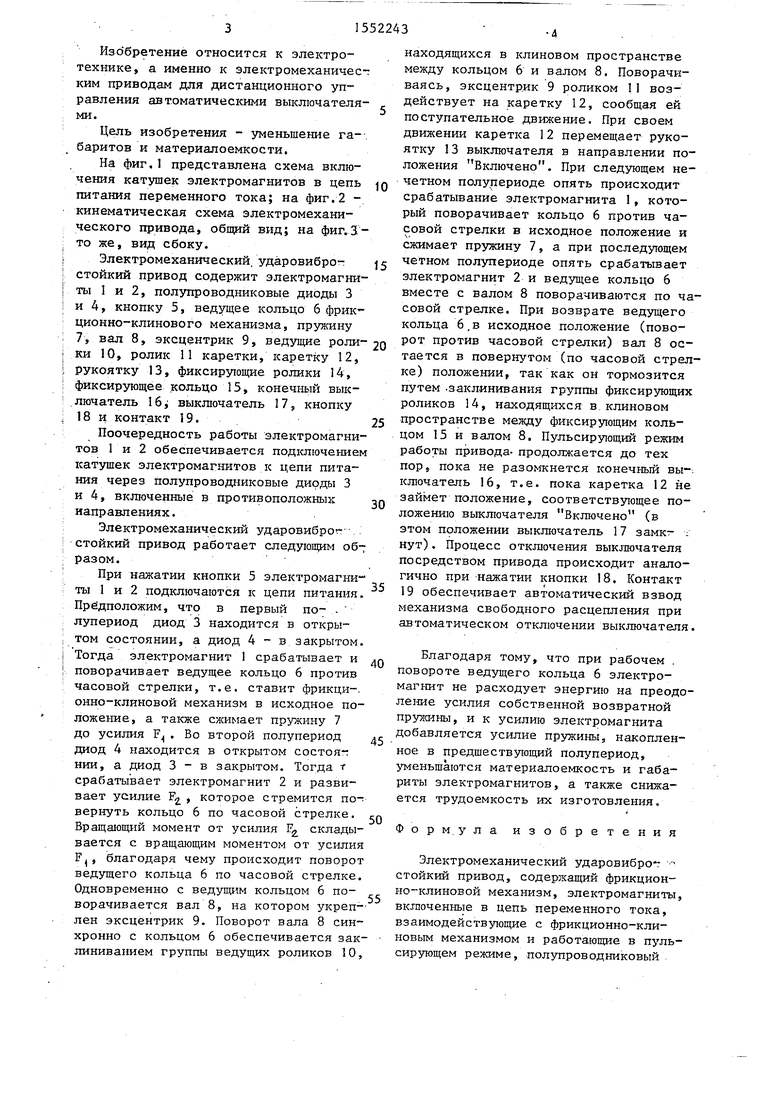
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПУЛЬСИРУЮЩИЙ УДАРОВИБРОСТОЙКИЙ ПРИВОД | 1966 |
|
SU180229A1 |
| Малогабаритный электромеханический пульсирующий привод | 1985 |
|
SU1259348A1 |
| Электромеханический привод | 1989 |
|
SU1707644A1 |
| Запирающее устройство для пружинного привода | 1986 |
|
SU1401522A1 |
| Электромеханический привод | 1987 |
|
SU1644254A1 |
| ЛЕНТОПРОТЯЖНЫЙ МЕХАНИЗМ КАССЕТНОГО МАГНИТОФОНА | 1992 |
|
RU2054202C1 |
| Рудничный кабельный электровоз | 1937 |
|
SU57625A1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ ЗАДВИЖЕК ВЫПУСКНЫХ ОТВЕРСТИЙ СКРЕБКОВОГО КОНВЕЙЕРА | 1967 |
|
SU198213A1 |
| Станок для резки | 1988 |
|
SU1680518A1 |
| Швейный полуавтомат | 1986 |
|
SU1339175A1 |
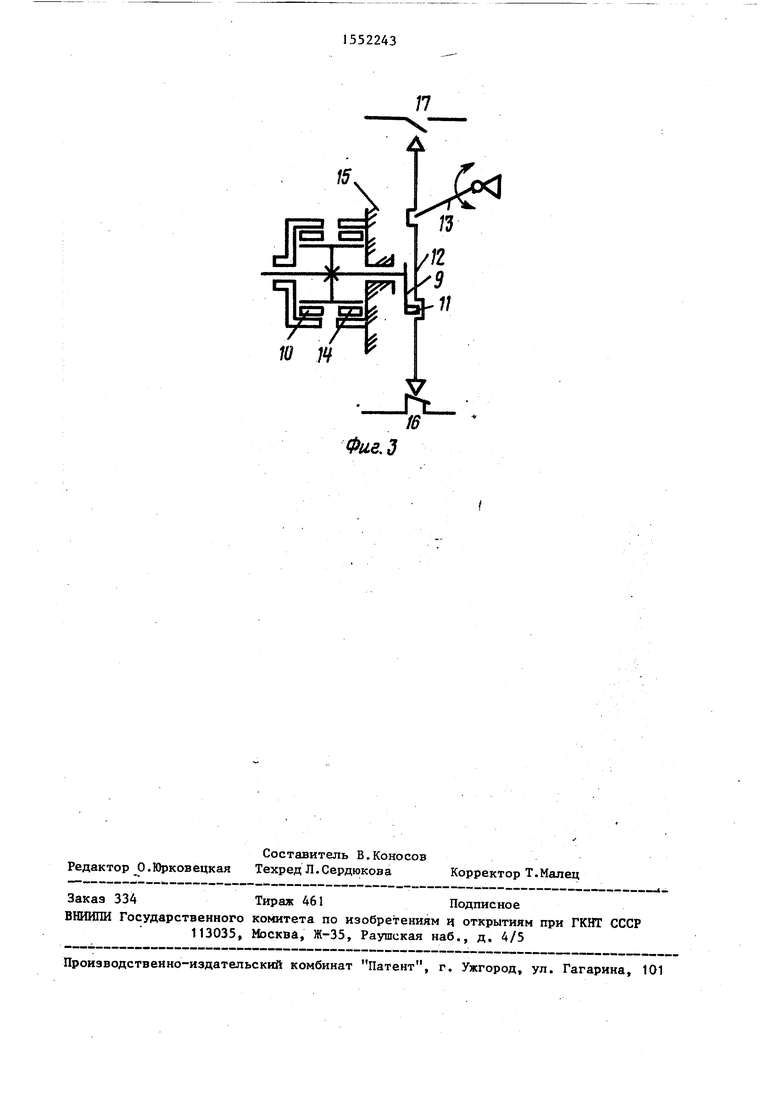
Изобретение относится к электротехнике. Целью изобретения является уменьшение габаритов и материалоемкости. Привод содержит электромагниты (ЭМ) 1, 2, соединенные с цепью питания через полупроводниковые диоды, ведущее кольцо 6 фрикционно-клинового механизма, пружину (П) 7, вал 8. Питание на ЭМ подается в разные полупериоды переменного тока. ЭМ накапливает энергию в П 7, ЭМ 2 поворачивает вал 8 суммарным с П 7 усилием. 3 ил.
О
(Л
8
ел ел
ГчЭ
4
СО
Изобретение относится к электротехнике, а именно к электромеханическим приводам для дистанционного управления автоматическими выключателя- ми.
Цель изобретения - уменьшение габаритов и материалоемкости.
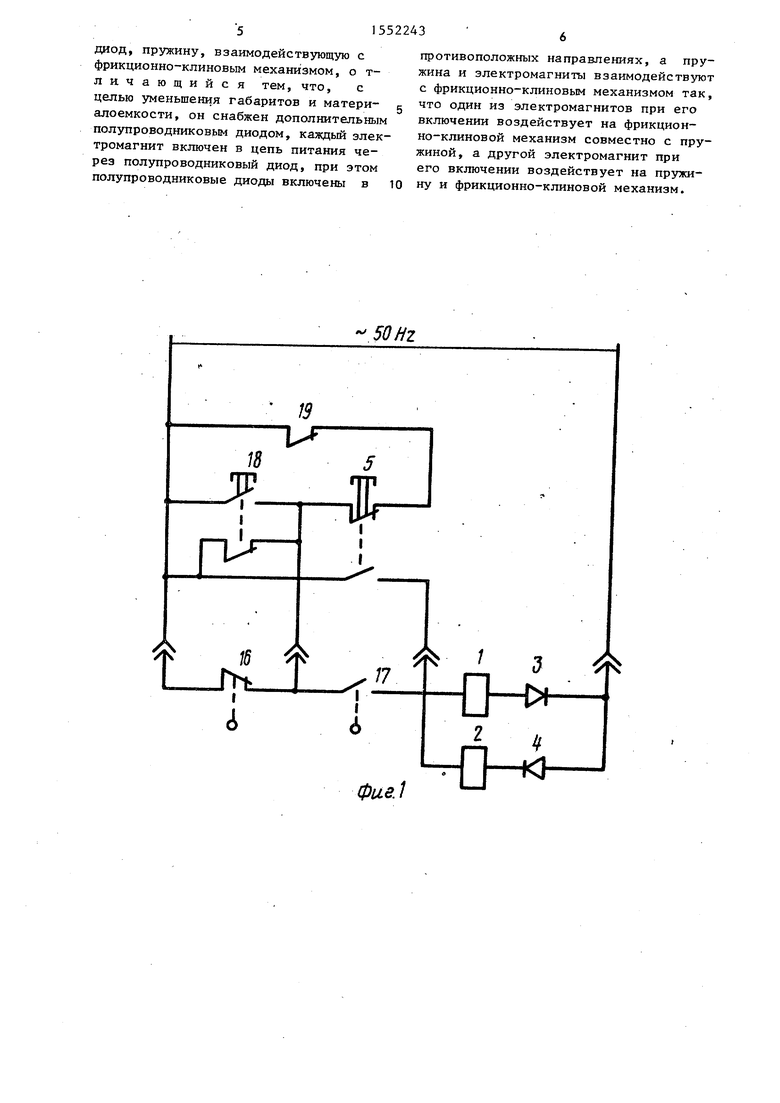
На фиг.1 представлена схема включения катушек электромагнитов в цепь питания переменного тока; на фиг.2 - кинематическая схема электромеханического привода, общий вид; на фиг. 3- то же, вид сбоку.
Электромеханический, ударовибро- стойкий привод содержит электромагниты 1 и 2, полупроводниковые диоды 3 и 4, кнопку 5, ведущее кольцо 6 фрик- ционно-клинового механизма, пружину 7, вал 8, эксцентрик 9, ведущие ролики 10, ролик 11 каретки, каретку 12, рукоятку 13, фиксирующие ролики 14, фиксирующее кольцо 15, конечный выключатель 16, выключатель 17, кнопку 18 и контакт 19.
Поочередность работы электромагнитов 1 и 2 обеспечивается подключением катушек электромагнитов к цепи питания через полупроводниковые диоды 3 и 4, включенные в противоположных направлениях.
Электромеханический ударовибро - стойкий привод работает следующим образом.
При нажатии кнопки 5 электромагниты 1 и 2 подключаются к цепи питания. Предположим, что в первый по- . лупериод диод 3 находится в открытом состоянии, а диод 4 - в закрытом. Тогда электромагнит 1 срабатывает и поворачивает ведущее кольцо 6 против часовой стрелки, т.е. ставит фрикци- онно-клиновой механизм в исходное положение, а также сжимает пружину 7 до усилия F . Во второй полупериод диод 4 находится в открытом состоят нии, а диод 3 - в закрытом. Тогда г срабатывает электромагнит 2 и развивает усилие F2 , которое стремится повернуть кольцо 6 по часовой стрелке. Вращающий момент от усилия F2 складывается с вращающим моментом от усилия F., благодаря чему происходит поворот ведущего кольца 6 по часовой стрелке. Одновременно с ведущим кольцом 6 по- ворачивается вал 8, на котором укреплен эксцентрик 9. Поворот вала 8 синхронно с кольцом 6 обеспечивается заклиниванием группы ведущих роликов 10,
.
Q
5 0 5
о
о Q
5
находящихся в клиновом пространстве между кольцом 6 и валом 8. Поворачиваясь, эксцентрик 9 роликом 11 воздействует на каретку 12, сообщая ей поступательное движение. При своем движении каретка 12 перемещает рукоятку 13 выключателя в направлении положения Включено. При следующем нечетном полупериоде опять происходит срабатывание электромагнита 1, который поворачивает кольцо 6 против часовой стрелки в исходное положение и сжимает пружину 7, а при последующем четном полупериоде опять срабатывает электромагнит 2 и ведущее кольцо 6 вместе с валом 8 поворачиваются по часовой стрелке. При возврате ведущего кольца 6 в исходное положение (поворот против часовой стрелки) вал 8 остается в повернутом (по часовой стрелке) положении, так как он тормозится путем -заклинивания группы фиксирующих роликов 14, находящихся в клиновом пространстве между фиксирующим кольцом 15 и валом 8. Пульсирующий режим работы привода- продолжается до тех пор, пока не разомкнется конечный выключатель 16, т.е. пока каретка 12 не займет положение, соответствующее положению выключателя Включено (в этом положении выключатель 17 замк- - нут). Процесс отключения выключателя посредством привода происходит аналогично при нажатии кнопки 18. Контакт 19 обеспечивает автоматический взвод механизма свободного расцепления при автоматическом отключении выключателя.
Благодаря тому, что при рабочем . повороте ведущего кольца 6 электромагнит не расходует энергию на преодоление усилия собственной возвратной пружины, и к усилию электромагнита добавляется усилие пружины, накопленное в предшествующий полупериод, уменьшаются материалоемкость и габариты электромагнитов, а также снижается трудоемкость их изготовления.
Формула изобретения
Электромеханический ударовибро- - стойкий привод, содержащий фрикцион- но-клиновой механизм, электромагниты, включенные в цепь переменного тока, взаимодействующие с фрикционно-кли- новым механизмом и работающие в пульсирующем режиме, полупроводниковый
диод, пружину, взаимодействующую с фрикционно-клиновым механизмом, о т- личающийся тем, что, с целью уменьшения габаритов и материалоемкости, он снабжен дополнительным полупроводниковым диодом, каждый электромагнит включен в цепь питания через полупроводниковый диод, при этом
полупроводниковые диоды включены в ю ну и фрикционно-клиновой механизм.
противоположных направлениях, а пружина и электромагниты взаимодействуют с фрикционно-клиновым механизмом так, что один из электромагнитов при его включении воздействует на фрикцион- но-клиновой механизм совместно с пружиной, а другой электромагнит при его включении воздействует на пружию щ
Фие.д
