Изобретение относится к измерительной технике и предназначено для измерений переменной силы и градуировки динамометров в квазистатическом режиме.
Целью изобретения является повышение точности.
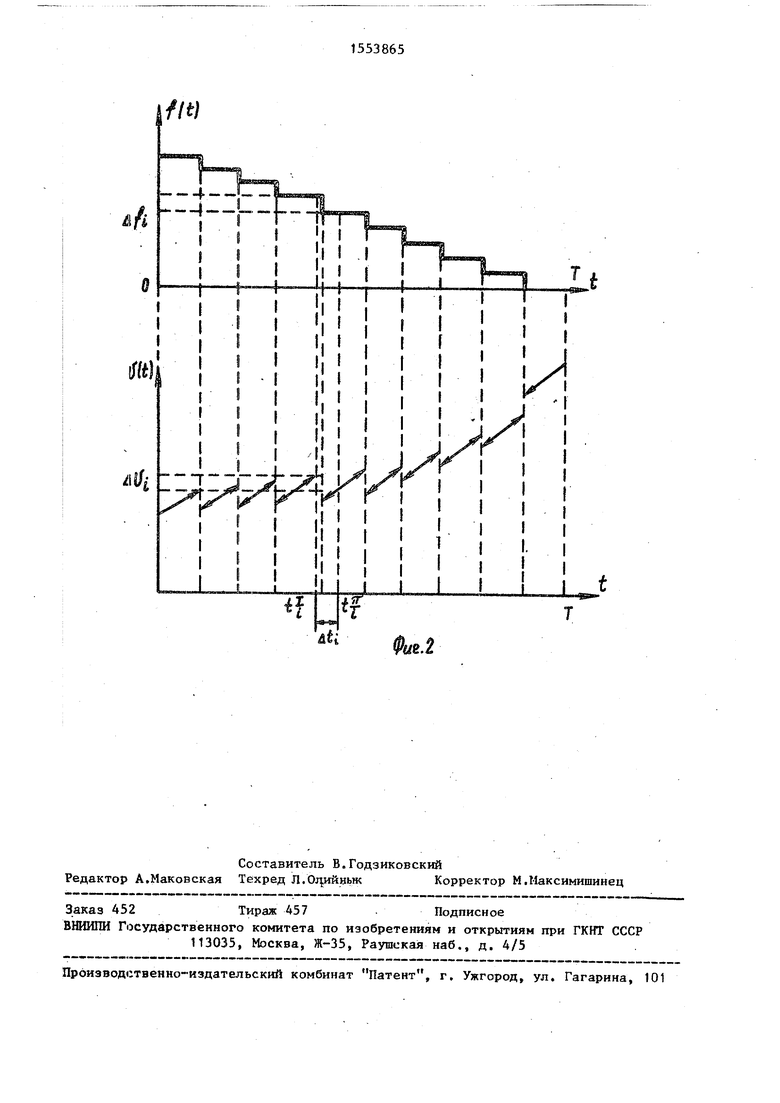
На фиг. 1 изображено устройство для осуществления способа измерений переменной силы; на фиг. 2 - вид ступенчатой функции f(t), описывающей изменение дополнительной силы по времени, и вид функции U(t), описывающей изменение выходного сигнала во время измерений.
Устройство для осуществления способа измерений переменной силы (фиг. 1) содержит динамометр 1, установленный на основании, силопередающую плиту 2, установленную на динамометре 1, пакеты 3 мер сипы, соединенные с силопе- редающей плитой 2, ограничители 4 максимальных зазоров, расположенные между мерами силы, подъемное уст- ройство 5, расположенное под пакетами 3 мер силы, и регистрирующее устройство 6. Силопередаю- щая плита 2 выполнена в виде симметричного коромысла, а пакеты 3 мер силы выполнены одинаковыми, с тем, чтобы вес мер силы прикладывался к
динамометру по его оси, исключая воздействие моментов силы, увеличивающих погрешность измерений. При- мер выполнения ограничителей максимальных зазоров 4 показан на правой стороне фиг. t (в разрезе). При крайнем нижнем положении подъемного устройства 5 меры силы в пакете 3 висят свободно, зацепившись одна за другую . посредством ограничителей 4 максимальных зазоров, свободно размещенных в полостях, выполненных в мерах силы. Между мерами силы установлен необхо- димый зазор. При движении вверх подъемное устройство 5 одновременно поднимает меры силы во всех пакетах. При этом меры силы, начиная с нижней, последовательно ложатся на подъемное устройство, теряя связь с верхней частью пакета 3. При крайнем верхнем положении подъемного устройства 5 все меры силы лежат на подъемном устройстве, не имея связи с силопередающей плитой 2.
Подъемное устройство 5 может быть .выполнено в виде гидравлического или винтового домкрата, при этом скорость
его перемещения можно регулировать, изменяя расход насоса или число оборотов приводного двигателя.
Регистрирующее устройство 6 может быть выполнено в виде быстродействующих датчиков наличия контактов между мерами силы, генератора меток времени и запоминающего устройства. На вход запоминающего устройства подаются метки времени, сигналы с датчиков наличия контактов между мерами силы и выходной сигнал динамометра. Сигнал с датчиков наличия контактов между мерами силы служит для определения момента начала и конца скачка силы, действующей на динамометр. Такое регистрирующее устройство позволяет фиксировать в запоминающем устройстве изменение выходного сигнала во время измерений и моменты времени, в которые происходили скачки силы, амплитуды которых известны заранее (поскольку они равны весу соответствующих мер силы). В качестве генератора меток времени можно использовать генератор ГЗ-49, в качестве запоминающего устройства - ЭВМ Электроника-60, на которой удобно производить последующие расчеты.
Устройство (фиг. 1) реализует предлагаемый способ измерений переменной силы следующим образом.
Перед началом измерений фиксируют значение выходного сигнала динамометра в отсутствие воздействия силы Uo. Затем подъемное устройство 5 переводят в крайнее нижнее положение. При этом меры силы свободно висят, зацепившись одна за другую посредством ограничителей 4 максимального зазора. После этого к силопередающей плите 2 прикладывают измеряемую силу F(t) и одновременно включают подъемное устройство 5, скорость перемещения которого устанавливают такой, чтобы за заданное время измерений Т оно подняло все меры силы. При этом регистрирующее устройство 6 фиксирует в запоминающем устройстве моменты снятия
очередных мер силы и выходной сигнал
i
динамометра как функцию времени U(t). После окончания измерений в регистрирующем блоке окажется информация о выходном сигнале U(t) в моментах появления скачков силы f(t), амплитуда которых равна весу соответствующих мер силы. При этом скачкообраз(1)
ные изменения дополнительной силы будут происходить практически мгновенно
Полученной измерительной информации достаточно для определения измеряемой силы на отрезке времени от О До Т.
Во время скачка ступенчатой функции f(t) на известное значение
(t|)-f(t|),
т if
где t- и tT выбирают соответственно
до начала и после конца зафиксированного момента скачка, произойдет скач- кообразное изменение выходного сигнала динамометра на
(t|)-U(t|).
При этом за время tut измеряемая сила изменится на значение&Fj Ј Vut;, где V - верхний предел диапазона скоростей измеряемых сил.
Для точного измерения реакции динамометра на скачок силы необходимо выполнение неравенства йГ;«дЈ;, т.е.
ut;« . Кроме того, время fttj должно быть больше времени распространения упругой деформации в теле динамометра. В этом случае динамическими эффектами можно пренебречь. При скорости распространения упругой деформации м/с и длине динамометра ,5 м это время составит 0,5:500 (с). Таким образом, &ti удовлетворяет неравенству
р «Atj«
После того как с учетом требуемой точности измерения силы выбраны промежутки времени Atj, вычисляют следующие соотношения:
+2(u(t)-U,)l ,(2)
,2,...N
где N - количество скачков ступенчатой функции;
а и b - неизвестные коэффициенты
градуировочной характеристи- ки динамометра вида
(U-U0)+b(U-U0)2 . (3)
Коэффициенты a, b находят извест- ными методами конфлюэнтного анализа из соотношения (2).
Как правило, вторым членом в выражении (3) можно пренебречь, так как
для измерений переменной силы обычно выбирают динамометры с линейной зависимостью выходного сигнала от приложенной силы.
Тогда измеряемая сила, может быть определена из соотношения
FCtMj-J otuCtbUel-fCt),
Из полученного соотношения видно, что измеряемая сила F(t) определяется без проведения предваритедьной градуировки динамометра, что упрощает процесс измерения и повышает точность.
Кроме того, в процессе измерений одновременно получают градуировочную характеристику динамометра.
20 Формула изобретения
5
0
5
0
Способ измерений переменной силы, заключающийся в измерении выходного сигнала динамометра при отсутствии нагрузки, нагружении динамометра и измерении его выходного сигнала, о т- ли чающийся тем, что, с целью повышения точности процесса нагру- жения в заданные фиксированные моменты времени, отсчитываемые с начала нагружения, на динамометр воздействуют дополнительными силами с заданными амплитудами, определяют вызванные этими воздействиями изменения выходного сигнала динамометра, определяют отношения амплитуд дополнительной силы к полученным изменениям выходного сигнала в каждый фиксированный момент времени, находят среднее арифметическое полученных отношений и определяют измеряемую силу из соотношения
F(t)(t)(t),
где а - среднее арифметическое отношений амплитуд дополнительной силы к соответствующим изменениям выходного сигнала; f(t) - дополнительная сила; U(t) - выходной сигнал динамометра; Uo.- выходной сигнал динамометра в
отсутствие нагрузки, при этом скорость изменения дополнительной силы выбирают больше отношения верхнего предела диапазона скоростей изменения измеряемой.силы к требуемой погрешности измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ градуировки динамометров | 1987 |
|
SU1432360A1 |
| Способ измерения силы | 1989 |
|
SU1622782A1 |
| Способ градуировки динамометров | 1988 |
|
SU1645864A1 |
| Устройство для динамической градуировки динамометров | 1982 |
|
SU1067379A1 |
| Устройство для градуировки динамометров | 1982 |
|
SU1091045A1 |
| Устройство для градуировки и поверки динамометров в условиях эксплуатации | 1987 |
|
SU1515084A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛ | 1972 |
|
SU435463A1 |
| Способ градуировки динамометров | 1987 |
|
SU1464059A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИМПУЛЬСНОЙ РЕАКТИВНОЙ СИЛЫ ТЯГИ ЖРД МТ | 2011 |
|
RU2478924C1 |
| Устройство для измерения силы | 1982 |
|
SU1024753A1 |
Изобретение относится к силоизмерительной технике и предназначено для измерения переменной силы и для градуировки динамометров в квазистатическом режиме. Цель изобретения - повышение точности, достигается тем, что при нагружении динамометра 1 к нему в заданные моменты времени прикладывают дополнительные известные силы, например, с помощью грузов 3, определяют отношения амплитуд дополнительных сил к полученным изменениям сигнала динамометра 1, усредняют полученные отношения по диапазону измерения и определяют измеряемую силу по математической формуле. 2 ил.
| Вишенков А.С | |||
| Методы и средства аттестации, поверки и испытаний сило- измерительных приборов | |||
| М.: Изд-во стандартов, 1985 | |||
| Испытательная техника | |||
| - Справочник./Под ред | |||
| В.В.Клюева | |||
| Т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| М.: Машиностроение, 1982, с | |||
| Устройство для извлечения срубленного леса с лесосеки | 1921 |
|
SU531A1 |
