1
Изобретение относится к силоизмерительной технике и может быть использовано для измерения механических сил и давлений в широком диапазоне.
Известные устройства для измерения сил, содержащие опорную плиту с призмами, на которых установлен динамометр, выполненный в виде разрезной скобы с грузоприемным и опорным плечами, во внутренней полости которой расположен магнитоупругий преобразователь, а на грузоприемном плече-силопередающий механизм, имеют нелинейность и временную нестабильность характеристики.
Предлагаемое устройство повышает точность в силу того, что оно снабжено приспособлением для изменения коэффициента передачи нагрузки на динамометр при постоянном значении измеряемой силы, включающим две различные по высоте опорные призмы, установленные на продольной оси динамометра и взаимодействующие поочередно с силопередающим механизмом, выполненным в виде двуплечего рычага, короткое плечо которого связано € динамометром, а длинное - содержит пяту и толкатель с приводом для поочередного взаимодействия толкателя и пяты с соответствующей из вышеуказанных опорных призм.
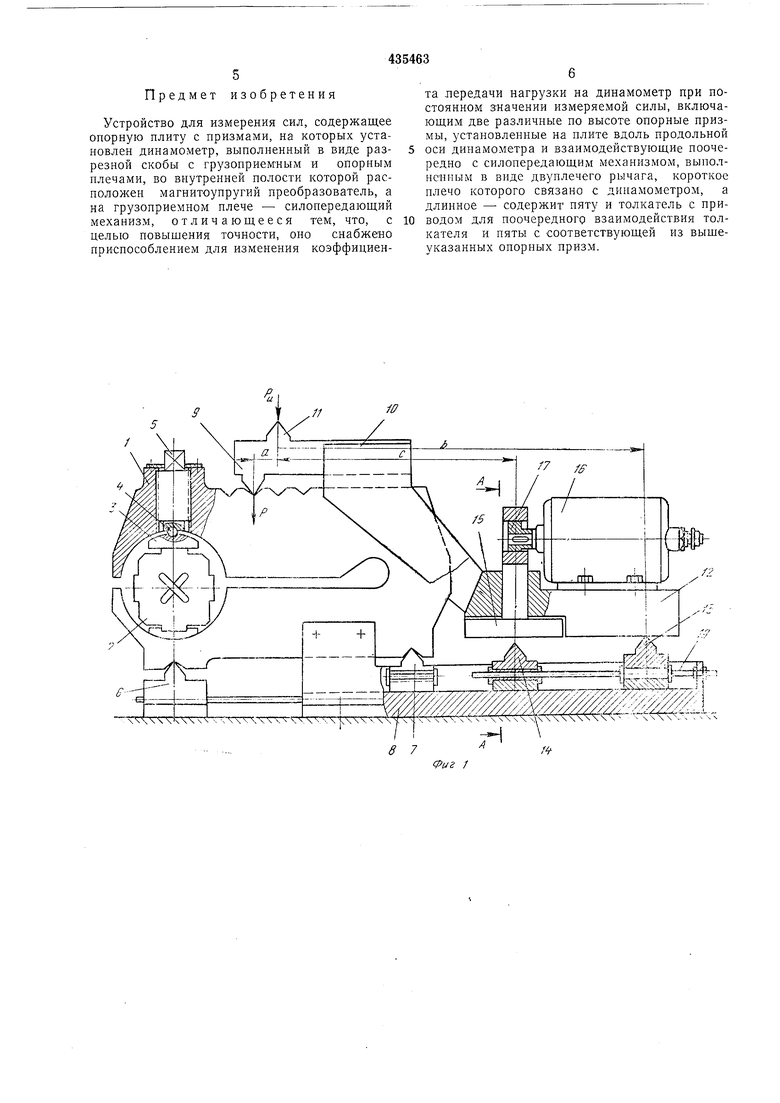
На фиг. 1 показано устройство, общий вид; на фиг. 2 - разрез по А-А на фиг. 1; на
фиг. 3 - выходная характеристика динамометра.
Устройство содержит динамометр, корпус 1 которого выполнен в виде скобы с грузоприемным и опорным плечами. Во внутренней полости скобы установлен магнитоупругий преобразователь 2 трансформаторного типа, закрепленный при помощи прижимного устройства, состоящего из накладки 3, щарика 4 и винта
5. Скоба находится на двух призматических опорах 6 и 7. Одна из этих призм расположена соосно с преобразователем и жестко связана с опорной плитой 8. Другая призма выполнена самоустанавливающейся и с.монтирована в опорной плите. Грузоприемное плечо скобы имеет ряд поперечных канавок треугольного профиля, в одной из кьторых устанавливается призма 9 силонередающего элемента 10. Короткое плечо силопередающего
элемента снабжено грузоприемной призмой 11, а длинное плечо - плоской пятой 12. Последняя выполнена с приспособлением для изменения коэффициента передачи нагрузки на динамометр при постоянном значении измеряеаМОЙ силы. Это приспособление имеет две самоустанавливающиеся под нагрузкой опорные призмы 13 и 14, толкатель 15 с плоской пятой и электромеханический провод. Указанные призмы установлены в опорной плите с
некоторым постоянным шагом б-с, где е и с - расстояния от грузоприемной призмы 11 соответственно до опорной призмы 13 и призмы 14. Элемент 10 в процессе измерения опирается через пяту или на призму 13, или на призму 14. Переключение осуществляется с помощью толкателя 15, приводимого . исполнительным механизмом 16 через кулисно-эксцентриковый механизм, который содержит эксцентрик 17, заключенный в кулисной рамке 18. Эксцентрик жестко сидит на валу исполнительного механизма, а кулисная рамка выполнена на конце штока толкателя. Шток имеет возможность поступательного перемещения вдоль своей оси относительно пяты силопередающего элемента. Устройство настраивается и работает следующим образом. Измеряемое усилие Рц действует на динамометр через призму 11. Силопередающий механизм распределяет усилие таким образом, что основная часть его воспринимается скобой. а меньшая часть - призмой 13 (или 14). В зависимости от требуемого диапазона из- 25 мерения производят грубую регулировку устройства. Для этого Силопередающий элемент передвигают вдоль продольной оси динамометра и последовательно устанавливают призму 9 в одну из поперечных канавок. Затем 30 приступают к тонкой регулировке чувствительности устройства при различных коэффициентах передачи И /С, где а - длина короткого плеча силопередающего- элемента. Тонкую регулировку устройства с коэффициентом /С производят перемещением опор- 40 ной призмы 14 вдоль продольной оси динамометра с помощью резьбовой тяги 19. При этом толкатель находится в крайнем нижнем положении и взаимодействует с призмой 14, а между лезвием призмы 13 и плоскостью пяты 12 45 имеется зазор. Аналогичным образом производят регулировку и при коэффициенте передачи К2- При этом перемещают призму 13, которая уже взаимодействует с пятой 12, а толкатель пере- 50 веден в крайнее верхнее положение и не касается лезвия призмы 14. Процесс измерения состоит из трех этапов. Первое измерение осуществляют при /Сь Толкатель при этом находится в крайнем 55 нижнем положении и опирается на призму 14, а скоба динамометра воспринимает усилие Л соответствует сигналу U на выходе магнитоупругого преобразователя. Второе измерение осуществляют при KzДля этого толкатель перемещается в крайнее верхнее положение, а пята силопередаю- 65 35 щего элемента ложится на призму 13. Скоба динамометра при этом воспринимает Р,,.ЯН а на выходе преобразователя появляется сигнал И. Третье измерение отличается от второго тем, что к динамометру прикладывается еще и эталонная нагрузка К. Таким образом, во время третьего измерения скоба воспринимает усилие (), а на выходе преобразователя появляется сигнал UB. На фиг. 3 показана зависимость выходного напряжения t/рых преобразователя от силы Р, действующей на скобу. В результате выполненных трех измерений получают систему уравнений с тремя неизвестными,.«(Л)Дг-Ян+Р(Л), U, a.(P,).f,.p + (P,t), и, а. (Р, t).K,-(Р„ + Л) + Р (Р, t. В приведенной системе уравнений параметры а(Р, t) и (Р, t) принимаются, постоянными, т. е. с достаточной степенью точности можно считать, что при соответствующем выборе величин Р.,, к и /Сг чувствительность устройства в диапазоне измерений усилий, действующих на скобу от Pi KiPii до Яз Кз() будет ПОСТОЯННОЙ. На фиг. 3 показана прямая 1-3, идущая под углом ф к оси абсцисс. Тогда параметр a(P,t) соответствует tg9, а параметр р(Л/) - начальному напряжению динамометра с прямолинейной градуировочной характеристикой (прямая 1-3) в данной точке диапазона измерения. При достаточном быстродействии силоизмерительного устройства можно предположить, что параметры a.(P,i) и (P,t) не успевают околыко-либо значительно И31мениться за время, необходимое для проведения трех измерений. Тогда решение системы уравнений относительно величины измеряемого усилия РИ будет иметь вид t/2-г/, РЭ-К, и,и () Анализ этого выражения показывает, что погрешность измерения ие зависит ни от нелинейности выходной характеристики динамометра, ни от дрейфа начального напряжения, ни от временной нестабильности его чувствительности. . Поскольку значения величин Рд, Ki и Kz могут быть определены с любой степенью точности, то можно предположить, что предлагаемым устройством можно производить измерения с погрешностью менее О, % от значения измеряемой величины силы.
Предмет изобретения
Устройство для измерения сил, содержащее опорную плиту с призмами, на которых установлен динамометр, выполненный в виде разрезной скобы с грузоприемным и опорным плечами, во внутренней полости которой расположен магнитоупругий преобразователь, а на грузоприемном плече - силопередающий механизм, отличающееся тем, что, с целью повышения точности, оно снабжено приспособлением для изменения коэффициента лередачи нагрузки на динамометр при постоянном значении измеряемой силы, включающим две различные по высоте опорные призмы, установленные на плите вдоль продольной оси динамометра и взаимодействующие поочередно с силопередающим механизмом, выполненным в виде двуплечего рычага, короткое плечо которого связано с динамометром, а длинное - содержит пяту и толкатель с приводом для поочередного взаимодействия толкателя и пяты с соответствующей из вышеуказанных опорных призм.
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамометр | 1978 |
|
SU769369A1 |
| Динамометр | 1977 |
|
SU690332A1 |
| Электромеханический динамометр | 1978 |
|
SU717570A1 |
| ПТ Б | 1973 |
|
SU393962A1 |
| ОПОРА ВЕСОВОГО УСТРОЙСТВА | 1972 |
|
SU355506A1 |
| Грузоприемное устройство железнодорожных весов | 1983 |
|
SU1193466A1 |
| Электромеханические платформенные весы | 1983 |
|
SU1089426A1 |
| Устройство для взвешивания мульд | 1978 |
|
SU744238A1 |
| Кистевой динамометр | 1990 |
|
SU1723465A1 |
| Устройство для градуировки и поверки динамометров в условиях эксплуатации | 1987 |
|
SU1515084A1 |