i 1 зооре тенне относится к меди ни некой технике, конкретно к yei ройс гвам для извлечения инородных тел из мягких тканей, например тканей головного мозга
lie,чью изобретения является обеспечение а травматичного захвата и извлечения инородного тела из мягких тканей, например iканей ГО.НЖНО1о мозга.
На фиг. 1 приведен вариант предлагаемого устройства с четырьмя губками, разрез, на фиг 2 - сечение А -А на фиг. 1; на фиг 3 - опроцесс захватывания
инородного тела; на фш. fi и 7две
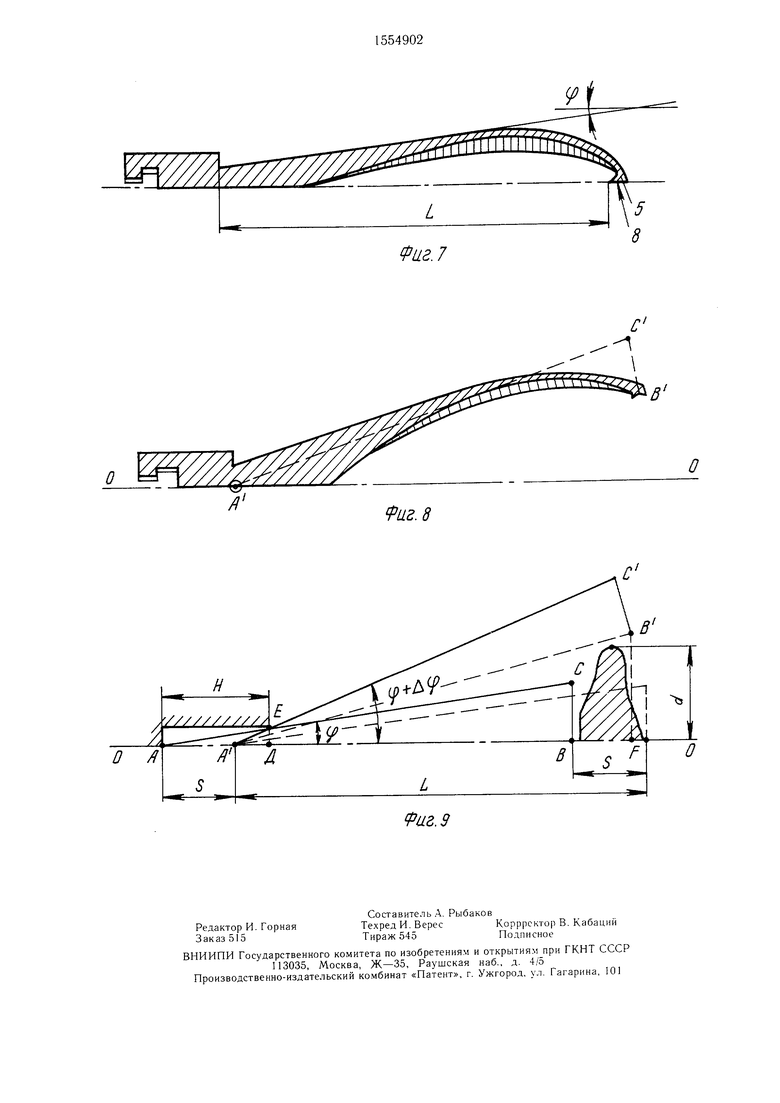
проекции отдельно губки в исходном состоянии, на фиг. Кгубка в раскрытом положении; на фиг. 9 соотношение геометрических размеров губки.
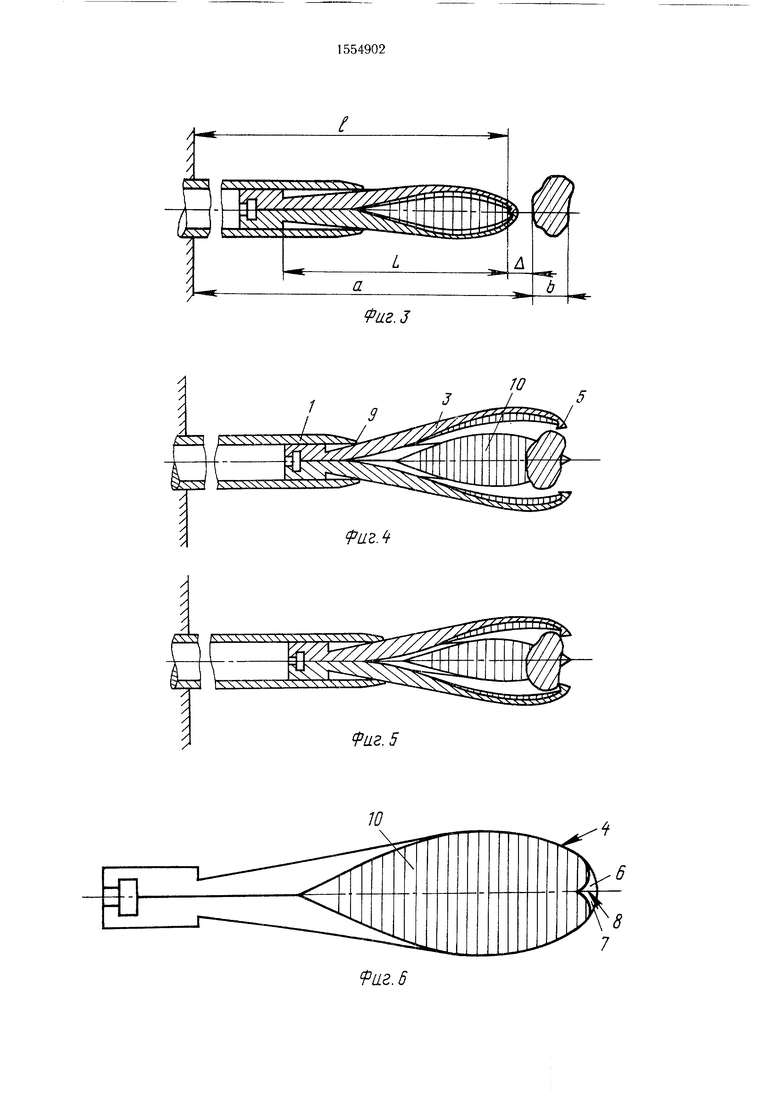
Вариант устройства для извлечения инородных тел и( мягких тканей, например i каней i пленного мозга содержит полый цилиндрический корпус 1, держатель 2 с симметричными губками 3. Внешние по верх- пост и сомкну i ых гу бок 3. обращенных к стру к турам мозга, образуют эллипсоид вращения, большая ось которою лежит на оси корпуса 1 (фиг. 1). Поперечное сечение (фиг. 2) внутренней поверхности эллипсоидной части губок вып клый четырехугольник, вершины углов которого лежат на внешней поверхности губок 3 и образуют их режу- кромку 4 Конец каждой губки 3 выполнен в виде тетраэдра 5, две плоские боковые поверхности 6 и 7 которого кон- такттипюг с одноименными поверхностями соседних i 6otN, а ребро 8, образованное этими поверхностями, лежит на оси корпуса Внешние поверхности губок 3, обращенных к ноюсти корпчса 1, контактирую с ею кромкой 9 (фиг 4) и выполнены коническими На вн греннеи поверхности 3 нанесены насечки 10 (фиг 4) Корпус 1 установлен в направляющей втулке 11, ра шегценной с возможностью вращения в стереота ксическом аппарате 12 (фиг. 1) Перемещение держателя 2 относительно корпуса 1 и корпуса 1 относительно направляющей втулки 11. а еле юватедыго. и сте- реогаксичеекого аппарата 12 обеспечивается микрометрическими винтами 13 и 14 соответственно. Винт 15 фиксирует направляющую втулку 11 и корпус 1 от возможного его проворor а от носи т ельпо с к рео т аксическом аппарата 12. Упор 1 В. закрепленный на втулке И посредством винта 17, обеспечивает рассчитанную величину ввода устройства / (фиг 3) в ткани мозга, которая визуально контролируется при помощи шкалы 18, нанесенной на корпусе 1.
Устройство используют следующим образом
Перед извлечением инородного тела с помощью рентгенографии выявляют его местоположение и размеры, а также определяют оптимальное направление введения предлагаемого устройства, которое обеспечивается
стереотаксическим аппаратом и методом. Затем, зная геометрические параметры губок Н и /, (фиг. 3), размеры извлекаемого и но родного тела d, задавшись перемещением держателя S, по формуле
(tbStgd),
10
где S - перемещение держателя относительно корпуса, мм; Н - расстояние, измеряемое вдоль оси
корпуса, мм (фиг. 9); /, - подлинная длина губок в сомкнутом состоянии вдоль оси корпуса, мм; 15d - максимальный размер инородного
тела в сечении по плоскости симметрии гл бки. измеряемый от оси корпуса, определяют угол наклона образующей конуса каждой губки в 20сомкнутом состоянии.
Выбирают необходимый набор губок 3, которые вставляются в корпус 1, предварительно деформированные так, чтобы они в свободном состоянии были разомкнуты. 5 Корпус 1 стереотаксически вводят в мозг гак, чтобы сомкнутые губки 3 не доходили до инородного тела на строго определенное расстояние (фиг. 3), которое задается при помощи регулируемого упора 16 Последний обеспечивает заданную вели- 0 чину ввода устройства /, отсчитываемую по шкале 18 от верхней грани направляющей втулки 11 Глубина ввода устройства / фиг. 3) выбирается так, чтобы выполнялось условие
I r b,
где а иb соответственно расстояние от внутренней поверхности черепа до инородного тела и габаритный размер -лого тела вдоль оси ввода устройства, которое определяют по рентгено- граммам.
После того, как при вращении микрометрического винта 13 губки 3 охватывают извлекаемое тело (фиг. 4). необходимо за- фи.кснровать его во внутренней полости гу- 5 бок. Это возможно достигнуть синхронным перемещением корпуса 1 поступательно к инородному телу, а держателя 2 от тела, чтобы взаимное расположение инородного тела и охватывающих его губок не изменилось. Например, манипуляция проводится 0 синхронно (или ступенчато) поворотом винтов 13 и 14 на один угол (при условии, что шаг резьбы микрометрических винтов 13 и 14 одинаков) соответственно по часовой и против часовой стрелок до полного фиксирования инородного тела. Конец губки 3 в виде тетраэдра и насечки 10 на внутренней поверхности губок 3 обеспечивают надежную фиксацию инородного тела до внутренней полости губок (фиг 5)
5
При необходимости например с целью вы деления инородного тела из окружающей его рубцовой капсулы, корпус 1 совместно с направляющей втулкой 1 1 проворачивают относительно аппарата 12, предварительно отстопорив винт 15, вырезая таким обра зом извлекаемое тело из капсулы ми кромками 4 губок 3 После этого VCT ройство извлекается из головного мозга При этом внешние поверхности губок пред охраняют ткани мозга от повреждения инородным телом при его извлечении
Таким образом предлагаемое устройст во позволяет с малой травматичностью удалять инородные тела произвольной формы из тканей головного мозга стереотаксическим способом через малые трепанационные от верстия в черепе, выделять и извлекать инородные тела из мозгового и оботочеч номозгового рубцов Наличие HOW виги мой микрометрической продольной поточи кор пуса и губок позволяет с наим(нынеи трав матичностью выделять и захватывать иноро j- ное тело Использование набора сменных гу бок, изготовленных для наиболее характер ных размеров и форм инородных тел (ос колки, пули и т д ), обеспечивает простую подготовк устройства к операции
Формула изобретении
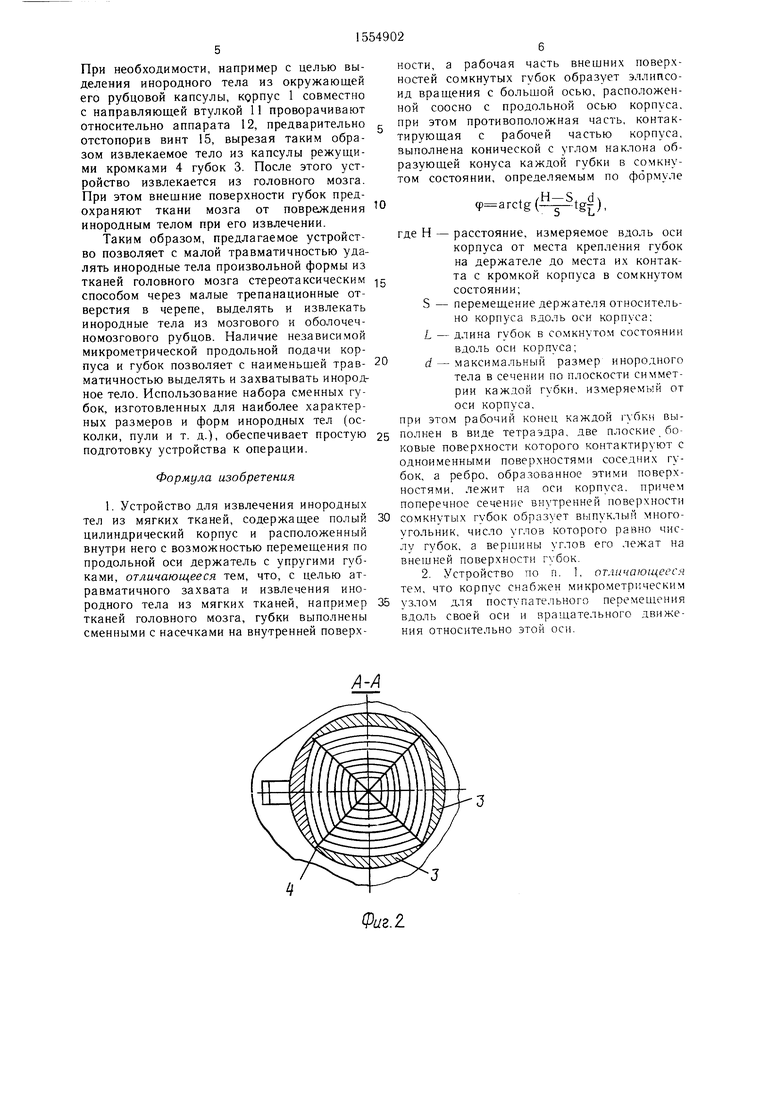
1 Устройство для извлечения инородных тел из мягких тканей содержащее полый цилиндрический корпус и расположенный внутри него с возможностью перемещения по продольной оси держате ib с упругими губ ками, отличающееся тем что с цепью ат равматичного захвата и извлечения и но родного тела из мягких тканей например тканей головного мозга, губки выпо жены сменными с насечками на внутренней поверх
нсхти, а рабочая часть внешних поверх ностей сомкнутых губок образует э миги о ид вращения с большой осью распо южен ной соосно с продольной осью корпуса при этом противоположная часть контак тирующая с рабочей частью корпуса выполнена конической с юм нак юна об разующей конуса каждой губки в СОМКНУ том состоянии, определяемым по форму те
(Н
(p arctg(Ь, сК -tgL)
5
0
5
0
5
S
/ d
где Н - расстояние, измеряемое в юль оси корпуса от места крещения убок на держателе до места их контак та с кромкой корпуса в СОМКНУТОМ состоянии,
перемещение держате 1Я опюсиге.п, но корпуса в ю 1ь о и корпи а 1 1ича г у бок BiuMKHyiiM иклоянии в до ть ос и коргн i a максима 1ьныи размер иноропкно те та в сечении по п юскос ги с и ммс т рии кажюи губки шмеряемни от оси корпуса
при этом раГюжи коней аждои 1 Лкч вы по.шеи в виде телраэфа iBe пнккис f новые поверхности когороч) контактируют с одноименными поверхностями сое ишх и бок, а ребро, обра-toBdiiiiot этими поверх ногтями лежит HI оси корпи i причем поперечное и цент внутренней нов иноетн
СОМКНУТЫХ ГУбОК Обр МУС т ВППУК1Ы МНОГО УГОЛЬНИК ЧИСТО ГЮВ КОТОРОГО plB iO I HC
jy губок ) вершин- У ппп ею и -к i г на внешней поверхности С, к
2 Vi. ГПОЙС ГВО 40 Г 1 lit ltlHiim ( с i
тем что корпус с н,«.бжен микрометр, чес ки м
У (ТОМ Д 1Я ПОСТУ Г,dIC PiHOI 1 Ц ре Mf lib HHV
вють своей оси и врпцап 1ьнои IBM/KI ния относите 1ьно этой оси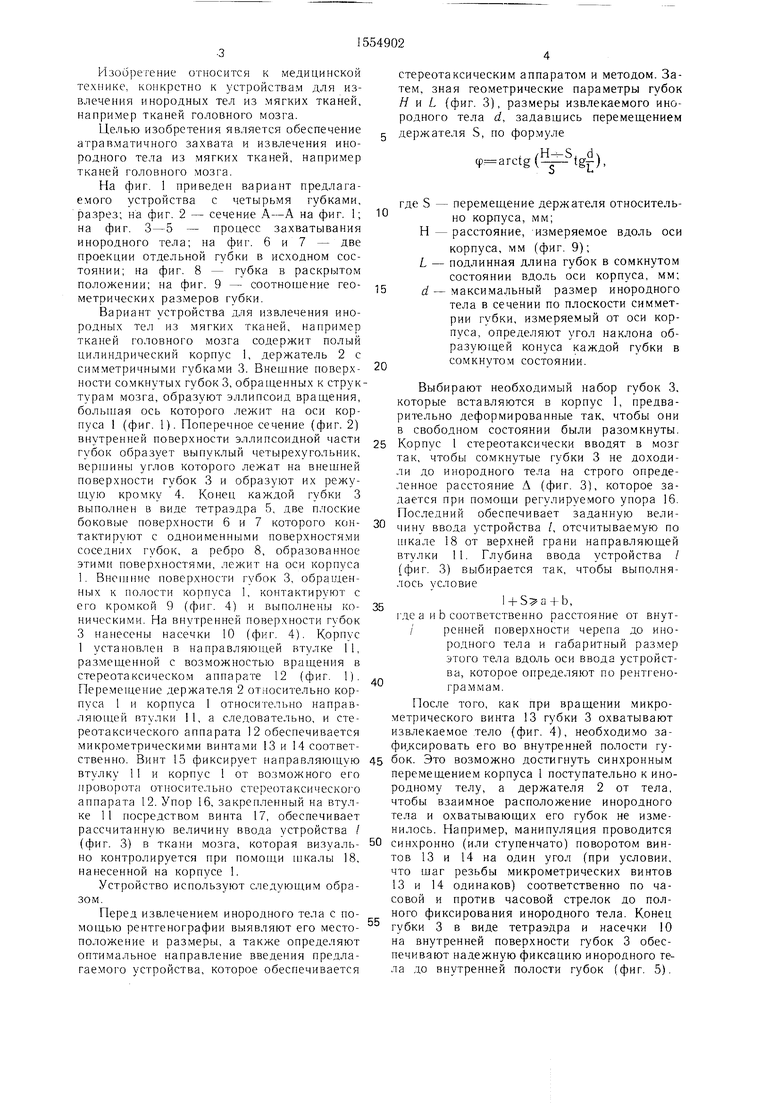
| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКИЙ ЗАЖИМ И ИНСТРУМЕНТ ДЛЯ РАБОТЫ С НИМ | 1996 |
|
RU2116761C1 |
| СШИВАЮЩЕЕ УСТРОЙСТВО ДЛЯ НАЛОЖЕНИЯ МЕХАНИЧЕСКОГО ОБВИВНОГО ШВА | 2007 |
|
RU2328228C1 |
| Устройство для фрагментации и извлечения секвестров | 2024 |
|
RU2824281C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА И УДАЛЕНИЯ МЕТАЛЛИЧЕСКОГО ИНОРОДНОГО ТЕЛА | 1991 |
|
RU2044520C1 |
| Устройство для извлечения внутрикостныхшТифТОВ | 1979 |
|
SU829106A1 |
| Устройство для извлечения внутрикостных штифтов | 1981 |
|
SU995774A1 |
| Устройство для извлечения труб из изложниц центробежного литья | 1981 |
|
SU977105A1 |
| Электродное устройство | 1988 |
|
SU1641269A1 |
| ЗАЖИМ | 2006 |
|
RU2330624C1 |
| ДЕРЖАТЕЛЬ ДЛЯ КОСТНОГО ТРАНСПЛАНТАТА | 2012 |
|
RU2487679C1 |
Изобретение относится к медицинской технике, а именно к устройствам для извлечения инородных тел из мягких тканей, например тканей головного мозга. Целью изобретения является обеспечение атравматического захвата и извлечения инородного тела из мягких тканей, например тканей головного мозга. Устройство состоит из полого цилиндрического корпуса 1, держателя 2 с упругими губками 3, внешние поверхности которых образуют эллипсоид вращения и которые выполнены с возможностью дозированного раздвижения каждой губки в зависимости от формы и размеров инородного тела, подлежащего извлечению. 1 з.п.ф-лы, 9 ил.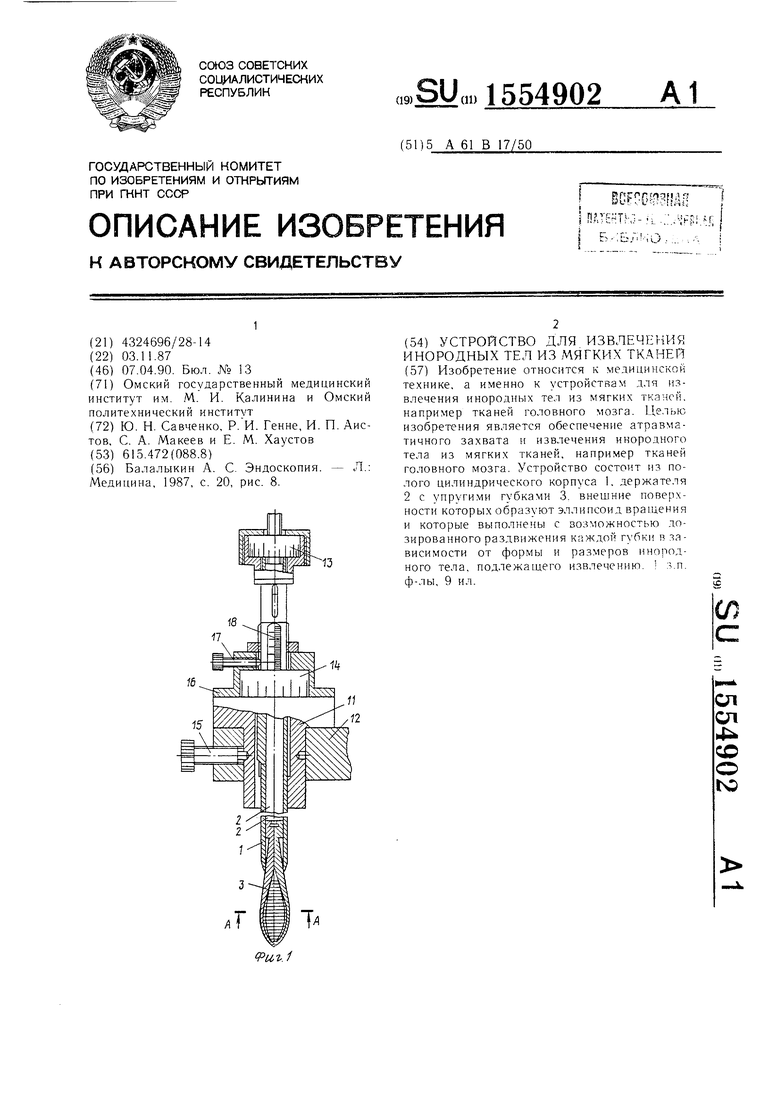
Фиг.З
10
5
фиг 4
Фаг. 5
7
Фаг. 6
О
V
Риг. 7
Фиг. 8
О
| Батгмыкин Г Энт,сккопия Me шпина 1487 с 20 рис 8 Генне И гов П Лис 13 П 16 IA |
