Известны электрические шаговые двигатели с ротороам и статором зубчатой конструкции и магнитопроводом, выполненным по тину магнитопровода разноименно-полюсной двухфазной индукторной машины с обмоткой двойного шага.
Особенность предлагаемого двигателя заключается в том, что обмотка возбуждения ротора расположена на статоре и величина ее полюсного деления больше величины полюсного деления обмотки возбуждения.
Такая конструкция двигателя позволяет уменьшить величину шага и снизить мощность управления.
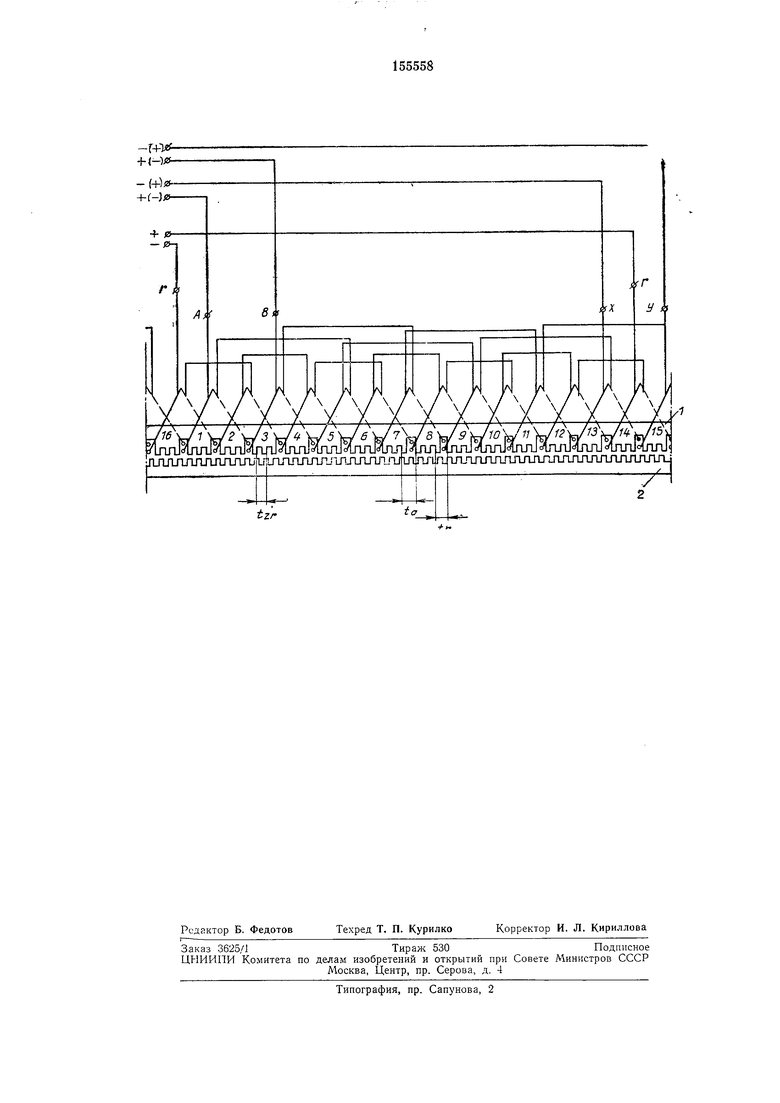
На чертеже представлена развертка конструктивной схемы предлагаемого шагового двигателя.
Двигатель состоит из зубчатых статора 1 и ротора 2, набраииых из листов электротехнической стали. Зубцы ротора расположены по окружности равномерно с шагом г Обмотки управления Л-X, В-У и возбуждения г-г (активизирующая ротор), размещенные в больших пазах статора, представляют собой катушки, охватывающие по два полуполюса. Общее число полуполюсов статора ровно шестнадцати (1 -16), причем на каждом из них расположено несколько зубцов (а 2, 3, 4...) с шагом в пределах полуполюса, равным шагу по зубцам ротора. Шаг по зубцам статора смежных полуиолюсов, охватываемых катуиукамп обмоток управления, равен
)
/
а по зубцам, статора смежных полуполюсов, охватываемых катушками обмотки возбуждения,
tr -- Л Г
Здесь Кц и К-2 - целые числа, которые выбирают так, чтобы сечения пазов статора соответствовали размерам обмоток.
Общее число зубцов ротора определяется равенством
2, 8 К, - ) + 8 (К, ± -) 4- 16 (а - 1),
а число зубцов статора Z. 16o. Так, например, для конструкции, изображенной на чертеже, при Ki K-2, а 3 и знаке
t, 1,5,,; t 1,25,,; 2, 48; г, . 54.
Момент, приложенный к ротору двигателя, имеет вид: а - угол поворота ротора в электрических градусах; т - максимальное значение коэффициента индуктивности между обмотками возбуждения и управления. При 1: Ж , /, / sin (а - 45). Изменяя направления токов в обмотках управления, можно получить: при /А 1 - IT sin (а + 45); при /л - 1 и/в - 1:Л1 - Ir I sfn (я+135); при /л - If I Sin (a+ 225). „,,,20 Таким образом, коммутируя в определенной последовательности обмотки управления, можно получить прерывистое вращение рото90° -, ра с шагом . Нетрудно установить, что коммутации токов по программе Положение Обмотка а по просоответствует левое вращение, грамме
-правое вращение. Принцип действия предлагаемого шагового двигателя состоит в том, что под действием50 электромагнитных сил ротор стремится занять такое положение, которое обеспечивало бы максимальное взаимное потокосцепление обмото:К возбуждения и управления. Число таких положений равно четырем. Однако его55
можно увеличить до восьми, если в программу управления двигателем включить положения, соответствующие нулевым токам в обмотках управления. Так, например, правое 15 25 30 35 40
Предмет изобретения
расположена на статоре, причем величина полюсного деления обмотки управления больше величины полюсного деления обмотки возбуждения. вращение ротора может быть обеспечено следующей программой коммутации тока в обмотках:Единственным недостатком такой програм мы коммутации является уменьшение в / 2 раз максимального момента, развиваемого двигателем при отсутствии тока в одной из обмоток унравления. Что касается числа шагов на один оборот, то в этом случае для конструкции, представленной на чертеже, оно будет равно 432. Однако даже для рассматриваемого двигателя при диаметре Д 70 мм приведенное число зубцов на полуполюсе, а следовательно, число зубцов ротора не является предельным. Двигатель потребляет наименьшую мощность из сети в том случае, когда она поровну распределяется между цепями возбуждения и управления. Однако, ток в обмотке возбуждения можно увеличить, например, в раз, уменьшив во столько же раз токи в обмотках управления. При этом максимальный момент не изменяется, общая потребляемая мощность при уменьшении мощности управления в 2 раза увеличивается всего на 25%. Если сечение пазов для обмоток возбуждения сделать больше, чем для обмоток управления, это позволит дополнительно уменьшить мощность управления. Такое уменьшение мощности целесообразно для силовых шаговых двигателей при использовании схем коммутации на кристаллических или полупроводниковых триодах. Электрический шаговый двигатель с ротором и статором зубчатой конструкции и магнитопроводом, выполненным по тину магнитопровода разноименно-полюсной двухфазной индукторной машины с обмоткой двойного шага, отличающийся тем, что, с целью уменьшения величины шага и снижения мощности управления, обмотка возбуждения ротора
-r+1
-ь -)
- {+)/ -bf-)
| название | год | авторы | номер документа |
|---|---|---|---|
| СИНХРОННЫЙ ДВИГАТЕЛЬ С РАЗОМКНУТЫМ МАГНИТОПРОВОДОМ | 1965 |
|
SU171905A1 |
| РЕВЕРСИВНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1966 |
|
SU184958A1 |
| Разноименнополюсный индукторный генератор | 1976 |
|
SU661689A1 |
| Реверсивный шаговый электродвигатель | 1977 |
|
SU746829A1 |
| Синхронный редукторный электродвигатель | 1990 |
|
SU1711299A1 |
| Четырехфазный шаговый микродвигатель | 1963 |
|
SU497689A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2019 |
|
RU2727956C1 |
| Многочастотный индукторный разноименно полюсный генератор | 1960 |
|
SU143904A1 |
| ВЕНТИЛЬНЫЙ ИНДУКТОРНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2352048C1 |
/
длллллJlnллJb lглJЧПJгплJlJ JlJгллJlJ ш rutn
tzr
/ / / ,
//
/s W / te/S
ггъохигтъчллгиггглллллллллгь
ta
