фие.1
пические регуляторы угла наклона, соединяющие ступени направляющих, тележку 3, связанную канатом , проходящим через обводные ролики ступеней и блок 5, с лебедкой 6, колеса и выдвижные опоры мачты. Обводные ролики выполнены подпружиненными в радиальном направлении с возможностью взаимодействия с траверсами, установленными под каждой ступенью. Подъемник устанавливается на крышу 2 здания за счет изменения угла наклона шарнирных направляющих телескопическими регуляторами. При подъеме груза на тележке 3 канат А обкатывается по обводным роликам ступеней, не изнашиваясь. При подъеме человека на крышу по ступеням последние, прогибаясь под нагрузкой, опираются на траверсы, что не позволяет им вращаться. 11 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подъема строительных грузов при малоэтажном строительстве | 2021 |
|
RU2781171C1 |
| ПОДЪЕМНИК | 2004 |
|
RU2305061C2 |
| АТТРАКЦИОН | 2010 |
|
RU2414277C1 |
| ПОДЪЕМНИК ТЕЛЕСКОПИЧЕСКИЙ | 2022 |
|
RU2785824C1 |
| Телескопический гидравлический подъемник | 1976 |
|
SU594039A1 |
| МАЧТОВЫЙ ПОДЪ?МйИКKi:5/;! JC | 1971 |
|
SU302305A1 |
| Мобильный буксировочный бугельный подъемник | 2016 |
|
RU2619352C1 |
| МАЧТОВОЕ УСТРОЙСТВО | 2012 |
|
RU2496193C1 |
| ТЕЛЕСКОПИЧЕСКАЯ МАЧТА ДЛЯ ПОДЪЕМНИКОВ | 1969 |
|
SU239517A1 |
| Подъемник | 1989 |
|
SU1744061A1 |
Изобретение относится к подъемно-транспортным механизмам, в частности к строительным подъемникам. Цель изобретения - повышение надежности. Подъемник содержит мачту из секционных направляющих 1 с горизонтальными ступенями, часть которых шарнирно соединена с другими и содержит телескопические регуляторы угла наклона, соединяющие ступени направляющих, тележку 3, связанную канатом 4, проходящим через обводные ролики ступеней и блок 5, с лебедкой 6, колеса и выдвижные опоры мачты. Обводные ролики выполнены подпружиненными в радиальном направлении с возможностью взаимодействия с траверсами, установленными под каждой ступенью. Подъемник устанавливается на крышу 2 здания за счет изменения угла наклона шарнирных направляющих телескопическими регуляторами. При подъеме груза на тележке 3 канат 4 обкатывается по обводным роликам ступеней, не изнашиваясь. При подъеме человека на крышу по ступеням последние, прогибаясь под нагрузкой, опираются на траверсы, что не позволяет им вращаться. 11 ил.
Изобретение относится к подъемно- транспортным механизмам, в частности к подъемникам для перемещения грузов по криволинейной траектории, например по поверхности крыши сооружения.
Цель изобретения - повышение надежности .
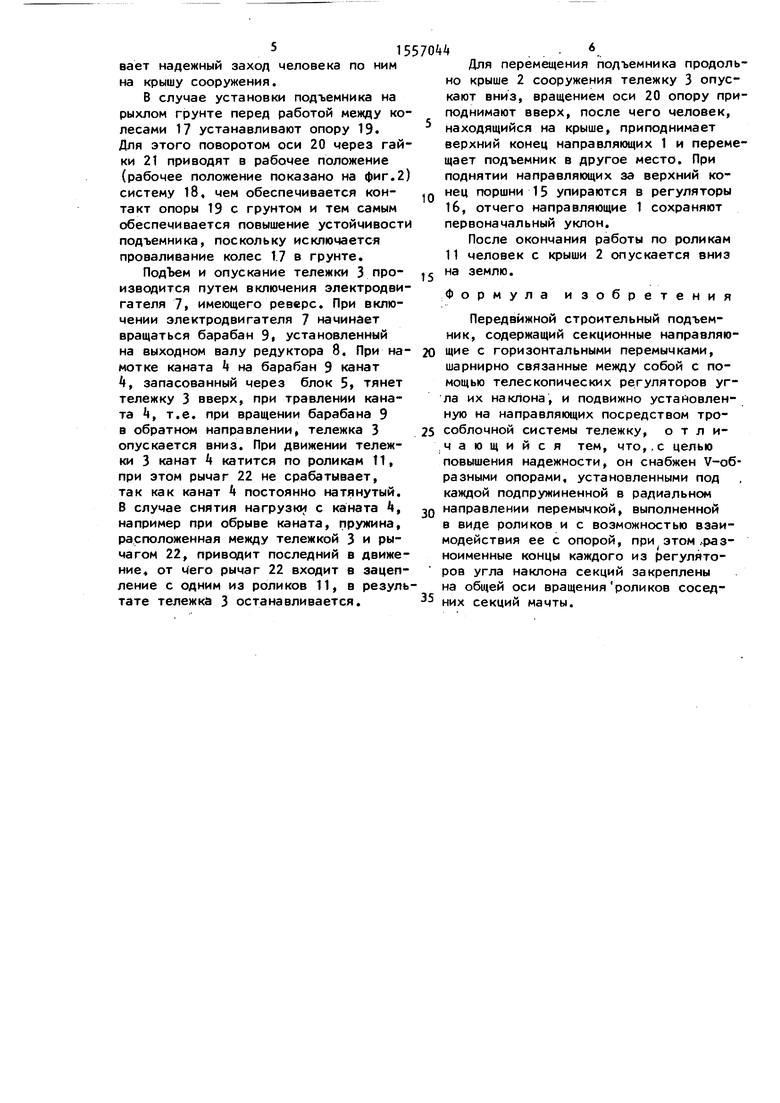
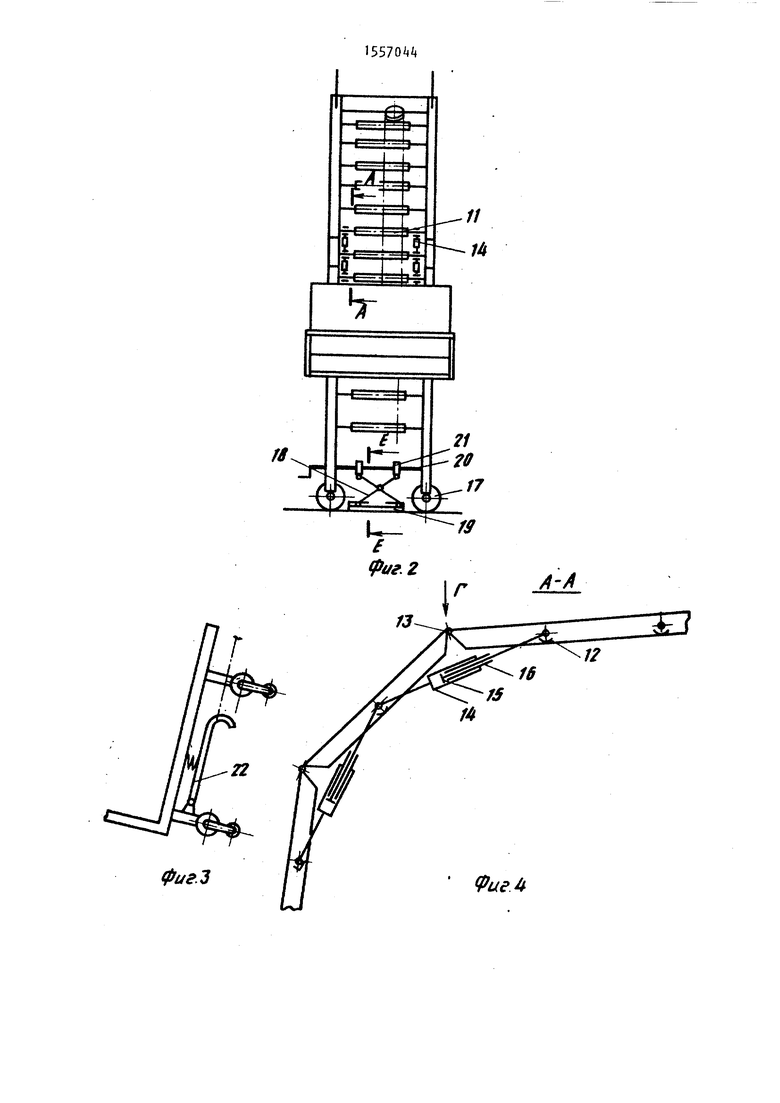
На фиг. 1 представлен общий вид строительного подъемника; на фиг. 2 - то же, вид сбоку; на фиг. 3 - общий вид тележки; на фиг. 4 - разрез А-А (увеличен) на фиг. 2; на фиг. 5 разрез Б-Б (увеличен) на фиг. 1; на фиг. 6 - продольный разрез подпружиненного ролика; на фиг. 7 разрез В-В на фиг. 6; на фиг. 8 - вид Г на фиг. 4; на фиг. 9 - разрез Д-Д на фиг. 8; на фиг. 10 - разрез Е-Е на фиг. 2; на фиг. 11 - вид И на фиг. 10
Подъемник содержит направляющие 1, верхняя часть которых упирается в крышу 2 сооружения, тележку 3, которая через тяговый канат , запасован- ный на блок,5, кинематически связана с лебедкой 6, состоящей из электродвигателя 7 и редуктора 8, на выходном валу которого насажен барабан 9 для намотки каната 4. Направляющие 1 соединены между собой осями 10 подпру- жиненных роликов 11 и траверсами 12, расположенными под роликами 11. Каждая из направляющих 1 на месте изгиба состоит из секций, соединенных шарнирами 13f и телескопических регуля- торов угла наклона направляющих 1. Каждый регулятор состоит из цилиндра Н, поршня 15 и регулятора 16 хода поршня.
В концах направляющих 1 прикреп- лены колеса 17. между которыми расположена шарнирно-рычажная система 18, к которой прикреплена опора 19. Система 18 смонтирована на оси 20, на
которой нарезана левая и правая резьба и установлены гайки 21.
Тяговый канат k к тележке 3 закреплен посредством подпружиненного рычага 22, один конец которого установлен с возможностью взаимодействия, в случае обрыва тягового каната, с подпружиненными роликами 11. К осям колес тележки 3 прикреплены посредством держателей колеса 23 для поддержания тележки на направляющих 1.
Подъемник работает следующим образом,
В начале работы подъемник собира- ют из отдельных секций (соединения . секций не показано) и ставят к сооружению так, чтобы верхняя часть направляющих 1 упиралась в крышу 2 сооружения.
В процессе собирания подъемника в зависимости от угла наклона крыши 2 сооружения регулируют угол наклона направляющих 1. Для этого вращением каждого из регуляторов 16 (втулок с наружной резьбой) изменяют положение поршней 15 в цилиндрах 1 (фиг. k) и отдельные секции поворачивают на шарнирах 13 на месте изгиба направляющих.
После собирания подъемника на тележку, которая находится в нижнем по- вожений, погружают строительный материал, например рулоны рубероида, который требуется подать на крышу 2 сооружения. Затем один из обслуживающего персонала через ролики 11 ступеней заходит на крышу. При наступании на ролики 11 (наружная поверхность роликов обрезинена) последние нажимаются вниз относительно своей оси 10 (фиг.6 и упираются наружной поверхностью в траверсу 12, что исключает поворот роликов 11 вокруг оси 10 и обеспечивает надежный заход человека по ним на крышу сооружения.
В случае установки подъемника на рыхлом грунте перед работой между колесами 17 устанавливают опору 19. Для этого поворотом оси 20 через гайки 21 приводят в рабочее положение (рабочее положение показано на фиг.2) систему 18, чем обеспечивается контакт опоры 19 с грунтом и тем самым обеспечивается повышение устойчивости подъемника, поскольку исключается проваливание колес 17 в грунте.
ПодЪем и опускание тележки 3 производится путем включения электродвигателя 7, имеющего реверс. При включении электродвигателя 7 начинает вращаться барабан 9, установленный на выходном валу редуктора 8. При намотке каната 4 на барабан 9 канат 4, запасованный через блок 5, тянет тележку 3 вверх, при травлении каната 4, т.е. при вращении барабана 9 в обратном направлении, тележка 3 опускается вниз. При движении тележки 3 канат 4 катится по роликам 11, при этом рычаг 22 не срабатывает, так как канат 4 постоянно натянутый. В случае снятия нагрузки с каната 4, например при обрыве каната, пружина, расположенная между тележкой 3 и рычагом 22, приводит последний в движение 4 от чего рычаг 22 входит в зацепление с одним из роликов 11, в результате тележка 3 останавливается.
10
15
Для перемещения подъемника продольно крыше 2 сооружения тележку 3 опускают вниз, вращением оси 20 опору приподнимают вверх, после чего человек, находящийся на крыше, приподнимает верхний конец направляющих 1 и перемещает подъемник в другое место. При поднятии направляющих за верхний конец поршни 15 упираются в регуляторы 16, отчего направляющие 1 сохраняют первоначальный уклон.
После окончания работы по роликам 11 человек с крыши 2 опускается вниз на землю.
Формула изобретения
Передвижной строительный подъемник, содержащий секционные направляю20 щие с горизонтальными перемычками, шарнирно связанные между собой с помощью телескопических регуляторов угла их наклона, и подвижно установленную на направляющих посредством тро25 соблочной системы тележку, отличающийся тем, что,.с целью повышения надежности, он снабжен V-об- разными опорами, установленными под каждой подпружиненной в радиальном
30 направлении перемычкой, выполненной в виде роликов и с возможностью взаимодействия ее с опорой, при этом разноименные концы каждого из регуляторов угла наклона секций закреплены на общей оси вращения роликов сосед35 них секций мачты.
фигЗ
PueU
ОГгпф
8Мф
3-3
L
Г/
/
уряд 81
S гпф
&
У-У
1ЭПф
//
/ /Т
| Заявка ФРГ № 3505506, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| ( ПЕРЕДВИЖНОЙ СТРОИТЕЛЬНЫЙ ПОДЪЕМНИК | |||
