Известны телескопические мачты для подъемников, состоящие из неподвижной и подвижной секций, грузового захвата и канатоблочного механизма его перемещения.
Предложенная телескопическая мачта отличается тем, что она снабжена приспособлением для одновременного подъема подвижной секции вместе с грузовым захватом. Это приспособление выполнено в виде укрепленного на наружной стенке подвижной секции шарнирного параллелограмма, взаимодействующего нижним звеном с грузовым захватом посредством укрепленного на нем ролика и верхним звеном - с выемкой, имеющейся в стенке неподвижной секции, в ее верхней части.
Благодаря этому возможен подъем подвижной секции мачты одновременно с подъемом грузового захвата посредством канато-блочного механизма.
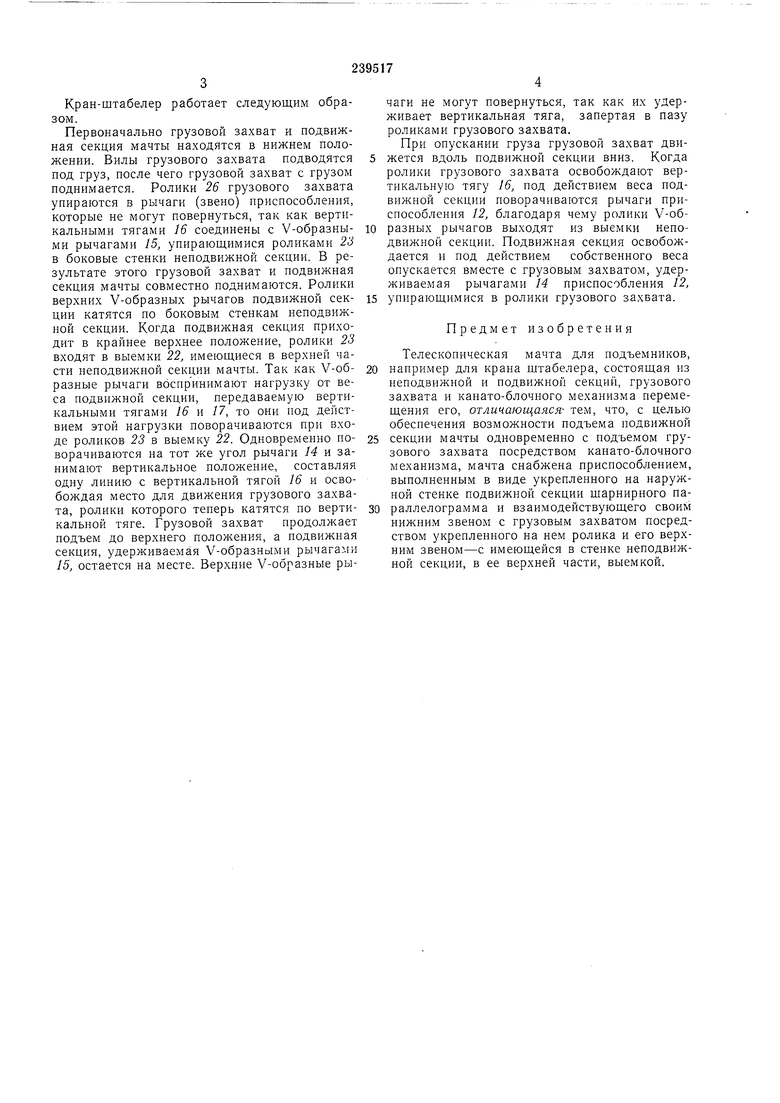
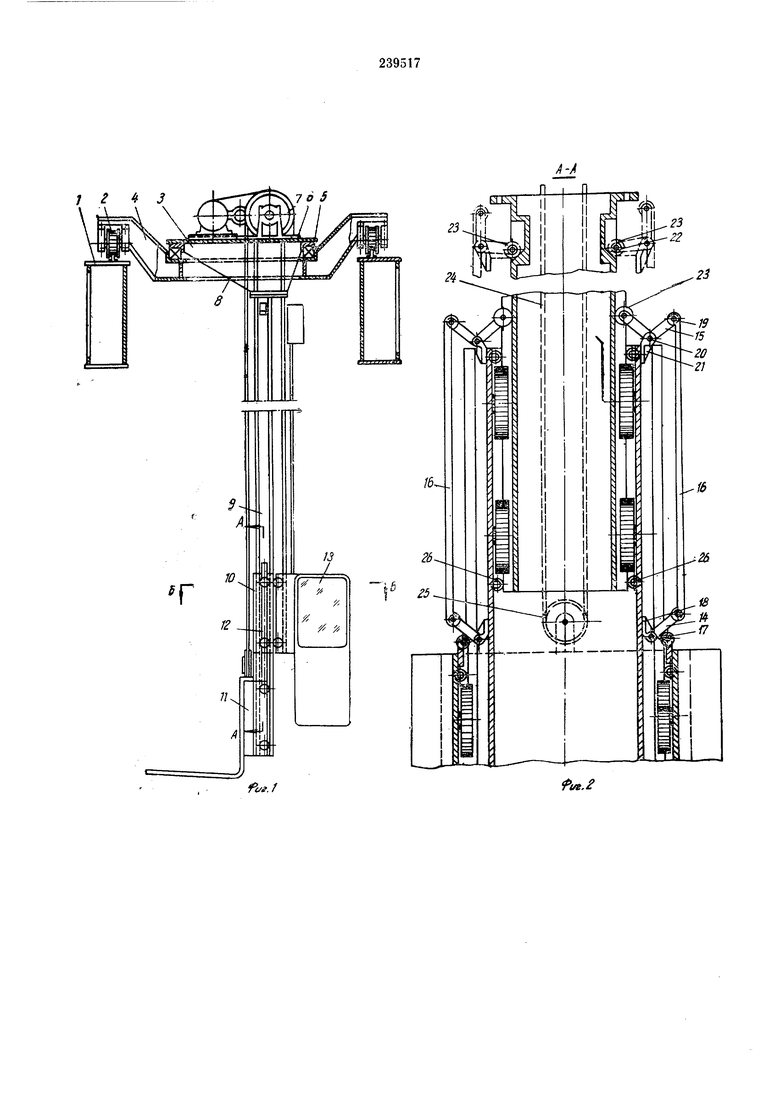
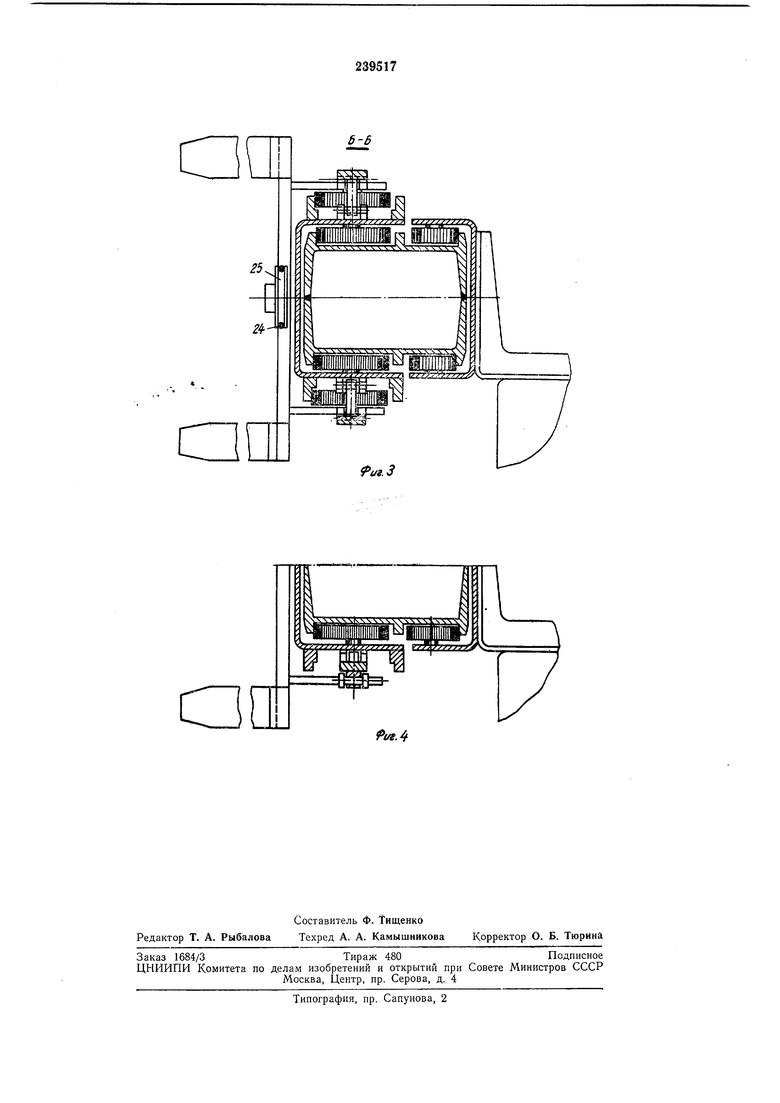
На фиг. 1 схематически изображен кранштабелер с телескопической мачтой, общий вид; на фиг. 2 - разрез по А-Л; на фиг. 3- разрез по Б-Б, при опущенной подвижной секции; на фиг. 4 - то же, при поднятой подвижной секции.
По мосту / подвесного или опорного типа крана-штабелера с помощью ходовых колес 2 передвигается тележка 3, на раме 4 которой установлено опорно-поворотное устройство 5.
На поворотной платформе 6 расположены привод 7 подъема грузового захвата и привод вращения платформы, а также жестко закреплен кронштейн 8. К кронштейну с помощью болтового соединения прикреплена телескопическая мачта крана-штабелера, состоящая из неподвижной 9, подвии ной W секций, грузового захвата // и приспособления 12 для одновременного подъема подвижной
секции вместе с грузовым захватом. По мачте с помощью привода подъема движется кабина 13 управления.
Приспособление 12 состоит из двух пар параллельно расположенных рычагов 14 и 15,
соединенных мел-еду собой шарнирно вертикальными тягами 16. Нижний рычаг звена одним концом шарниром 17 i кронштейном 18 укреплен на подвижной секции, а вторым соединен шарниром 19 с вертикальной тягой. Верхний V-образный рычаг средней частью с помощью шарнира 20 и кронштейна 2 связан с подвил ной секцией. На верхней части неподвил ной секции имеется выемка 22, расположенная под острым углом к боковой плоскости мачты, в которую заходит ролик 23 при повороте V-образного рычага. Грузовой захват поднимается канатом 24 (или цепью), проходящим через блок 25, устаповленный на плите грузового
Кран-штабелер работает следующим образом.
Первоначально грузово захват и подвижная секция мачты находятся в нижнем положении. Вилы грузового захвата подводятся под груз, после чего грузовой захват с грузом поднимается. Ролики 26 грузового захвата упираются в рычаги (звено) приспособления, которые не могут повернуться, так как вертикальными тягами 16 соединены с V-образными рычагами 15, упирающимися роликами 23 в боковые стенки неподвижной секции. В результате этого грузовой захват и подвижная секция мачты совместно поднимаются. Ролики верхних V-образных рычагов подвижной секции катятся по боковым стенкам неподвижной секции. Когда подвижная секция приходит в крайнее верхнее положение, ролики 23 входят в выемки 22, имеющиеся в верхней части неподвижной секции мачты. Так как V-образные рычаги воспринимают нагрузку от веса подвижной секции, передаваемую вертикальными тягами 16 и 17, то они иод действием этой нагрузки поворачиваются при входе роликов 23 в выемку 22. Одновременно поворачиваются на тот же угол рычаги 14 и занимают вертикальное положение, составляя одну линию с вертикальной тягой 16 и освобождая место для движения грузового захвата, ролики которого теперь катятся по вертикальной тяге. Грузовой захват продолжает подъем до верхнего положения, а подвижная секция, удерживаемая V-образными рычагами 15, остается на месте. Верхние V-образные рычаги не могут повернуться, так как их удерживает вертикальная тяга, запертая в пазу роликами грузового захвата. При опускании груза грузовой захват движется вдоль подвижной секции вниз. Когда ролики грузового захвата освобождают вертикальную тягу 16, под действием веса подвижной секции поворачиваются рычаги приспособления 12, благодаря чему ролики V-образных рычагов выходят из выемки неподвижной секции. Подвижная секция освобождается и под действием собственного веса опускается вместе с грузовым захватом, удерживаемая рычагами 14 приспособления 12,
упирающимися в ролики грузового захвата.
Предмет изобретения
Телескопическая мачта для подъемников, например для крана штабелера, состоящая из неподвижной и подвижной секций, грузового захвата и канато-блочного механизма перемещения его, отличающаяся- тем, что, с целью обеспечения возможности подъема подвижной секции мачты одновременно с подъемом грузового захвата посредством канато-блочного механизма, мачта снабжена приспособлением, выполненным в виде укрепленного на наружной стенке подвижной секции шарнирного параллелограмма и взаимодействующего своим нижним звеном с грузовым захватом посредством укрепленного на нем ролика и его верхним звеном-с имеющейся в стенке неподвижной секции, в ее верхней части, выемкой. 7 / « J
иг.З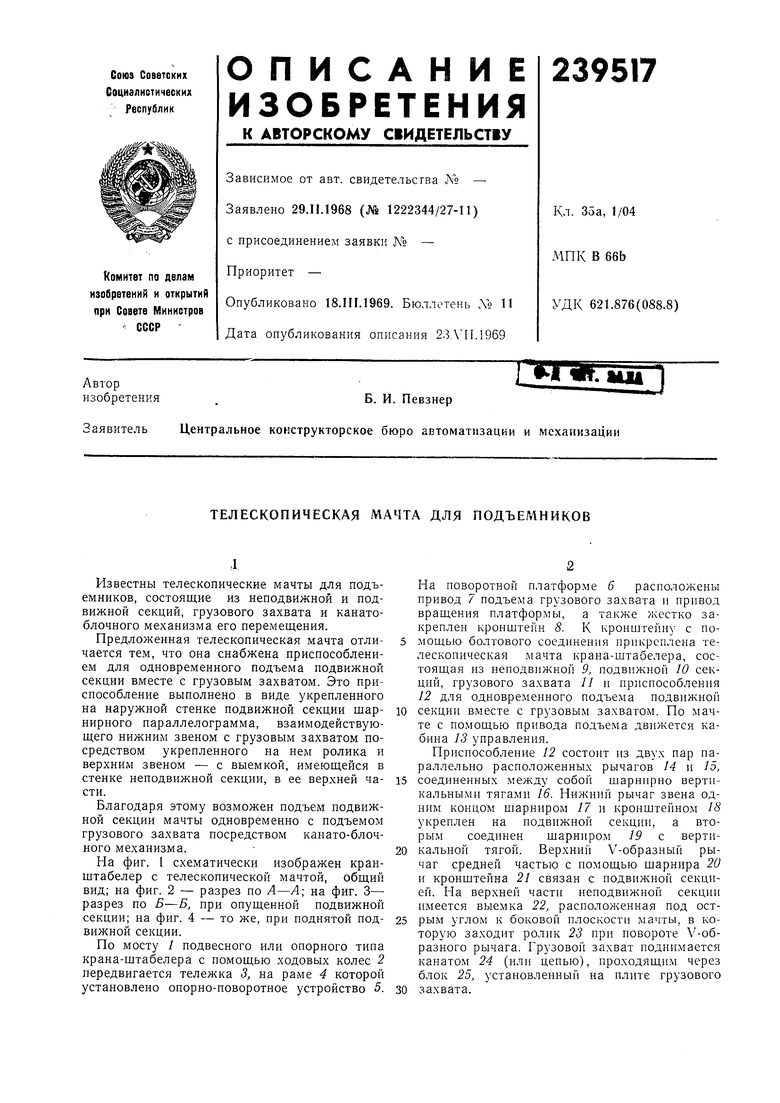
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопическая колонна | 1977 |
|
SU727543A1 |
| Передвижная мачта освещения телескопического типа | 2022 |
|
RU2795671C1 |
| КОМПЛЕКТОВОЧНЫЙ КРАН —ШТАБЕЛЕР | 1974 |
|
SU380105A1 |
| Кран-манипулятор | 1983 |
|
SU1150214A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Подъемно-перегрузочное устройство | 1989 |
|
SU1724546A1 |
| Прицеп для перевозки на раме тягача | 2022 |
|
RU2789565C1 |
| Устройство для загрузки и разгрузки стеллажей | 1981 |
|
SU977335A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1594079A1 |
| Кран-штабелер | 1990 |
|
SU1782874A1 |
.4
