vj
о
ON
73
L-tpoi {К
/ /55 II /J a л.
.,... ..--..,
: и
L.
изобретения - повышение надежности работы подъемника. Подъемник содержит раму 1 с ходовыми колесами 2 и аутригерами 3, на которой смонтированы две стойки 5. На стойках 5 в цапфах 6 посредством осей 7 шарнирно закреплена нижняя секция 9, в которую телескопически вставлены промежуточная 10 и оконечная 11 секции подъемника. На верхней секции 11 закреплен оголовок 12, содержащий вертикальные направляющие 13, ориентированные соосно с направляющими 13 нижней секции 9. В направляющих 13 подъемника размещена подъемная платформа 28 с опорными ходовыми роликами 34. Подъемник снабжен фиксатором положения подъемной платформы 28 относительно направляющих 13, запорным устройством для фиксации секции 9 в вертикальном положении относительно рамы 1, тросовым приводом, выполненным в виде тяговой электролебедки 68, смонтированной на раме 1, сцепным устройством для стыкования направляющих 13 нижней секции 9 и оголовка 12, выполненном в виде накидного крюка, а также узлом расстыковки направляющих 13. Платформа 28 оснащена фиксатором ее положения на направляющих 13. 1 з.п. ф-лы, 26 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНИК ТЕЛЕСКОПИЧЕСКИЙ | 2022 |
|
RU2785824C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2399578C1 |
| Строительный подъемник | 1985 |
|
SU1303534A1 |
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| ОСВЕТИТЕЛЬНАЯ МАЧТА | 2007 |
|
RU2357057C2 |
| УСТАНОВКА ДЛЯ ПЕРЕМЕЩЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 1991 |
|
RU2017641C1 |
| Стенд для испытания гусеничных транспортных средств | 1987 |
|
SU1495664A1 |
| ТРАНСПОРТАБЕЛЬНЫЙ БОРТОВОЙ ПОДЪЁМНИК | 2015 |
|
RU2602269C2 |
| Строительный подъемник | 1979 |
|
SU854858A1 |
| Телескопический подъемник | 1990 |
|
SU1754641A1 |


Изобретение относится к подъемникам, имеющим подъемную платформу и позволяющим работать одному или нескольким рабочим на некоторой высоте над поверхностью земли, например, по уходу и ремонту зданий, уличных фонарей и т.д. Цель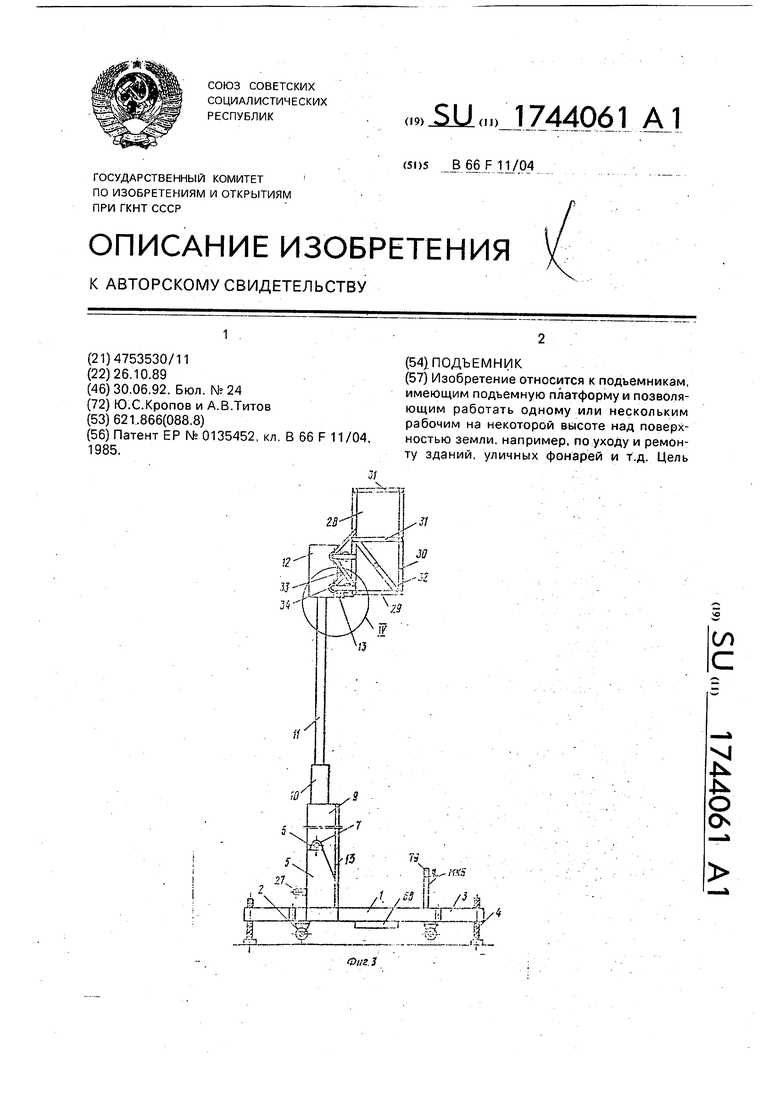
Изобретение относится к подъемникам, имеющим подъемную платформу и позволяющим работать одному или нескольким рабочим на некоторой высоте над поверхностью земли, например, по уходу и ремонту зданий, уличных фонарей и т.д.
Цель изобретения - повышение надежности работы подъемника.
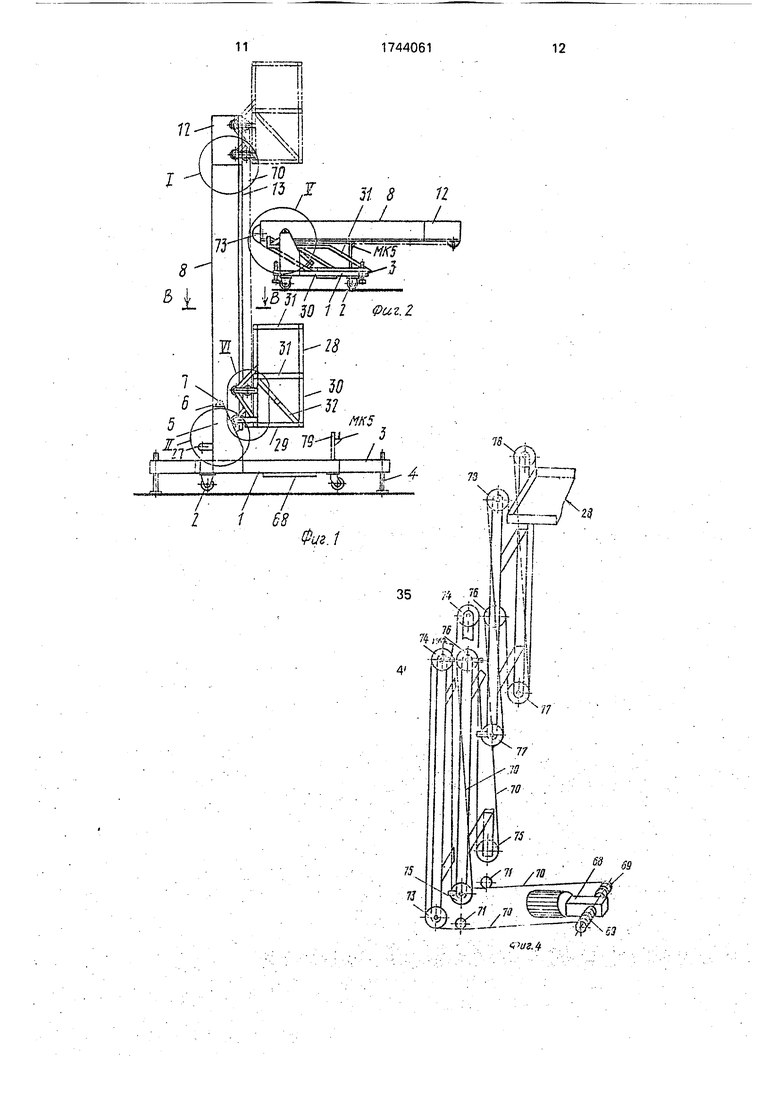
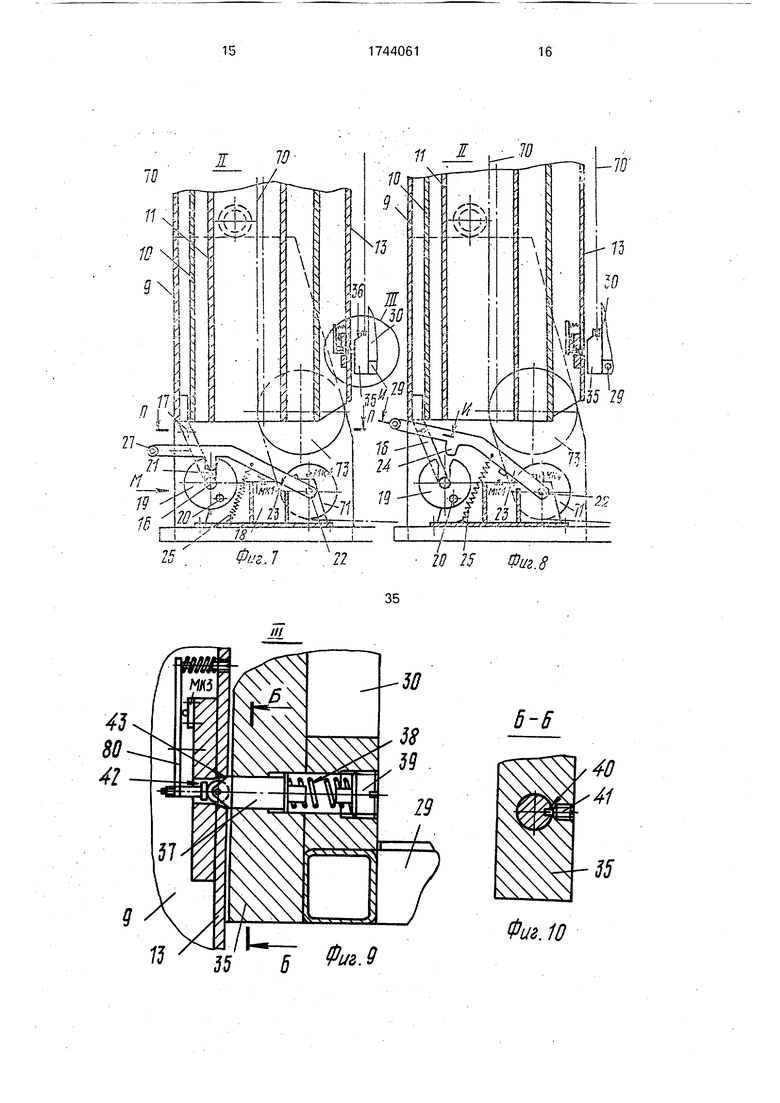
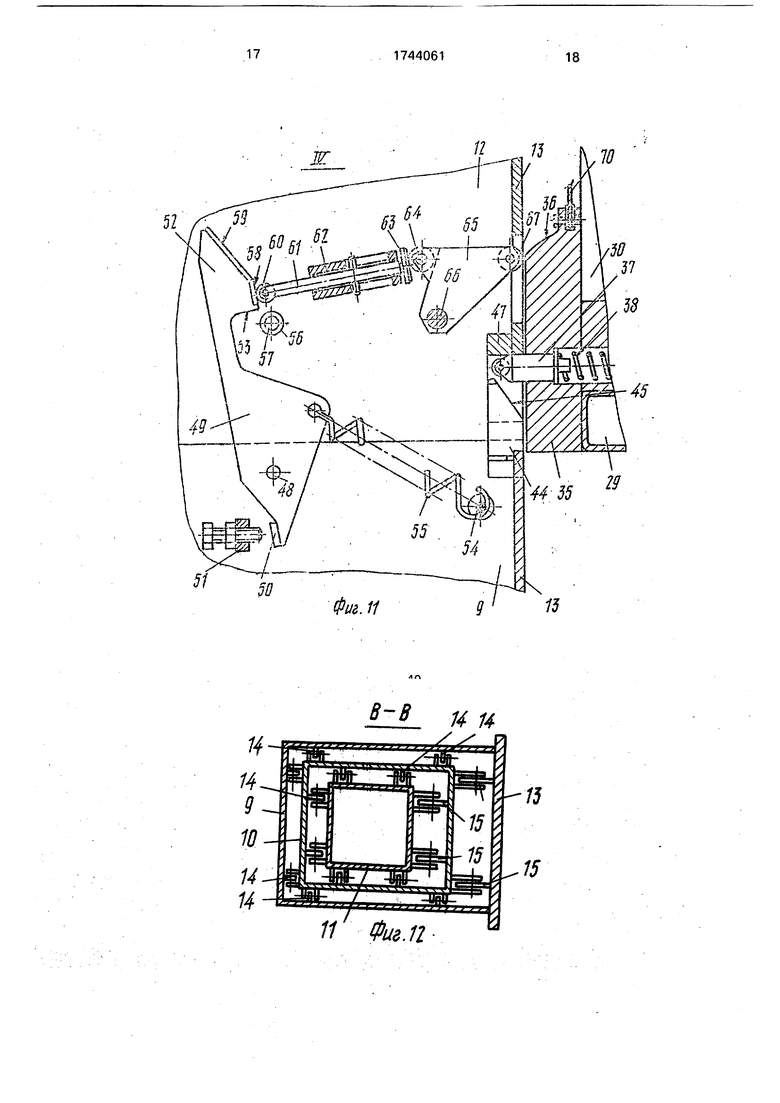
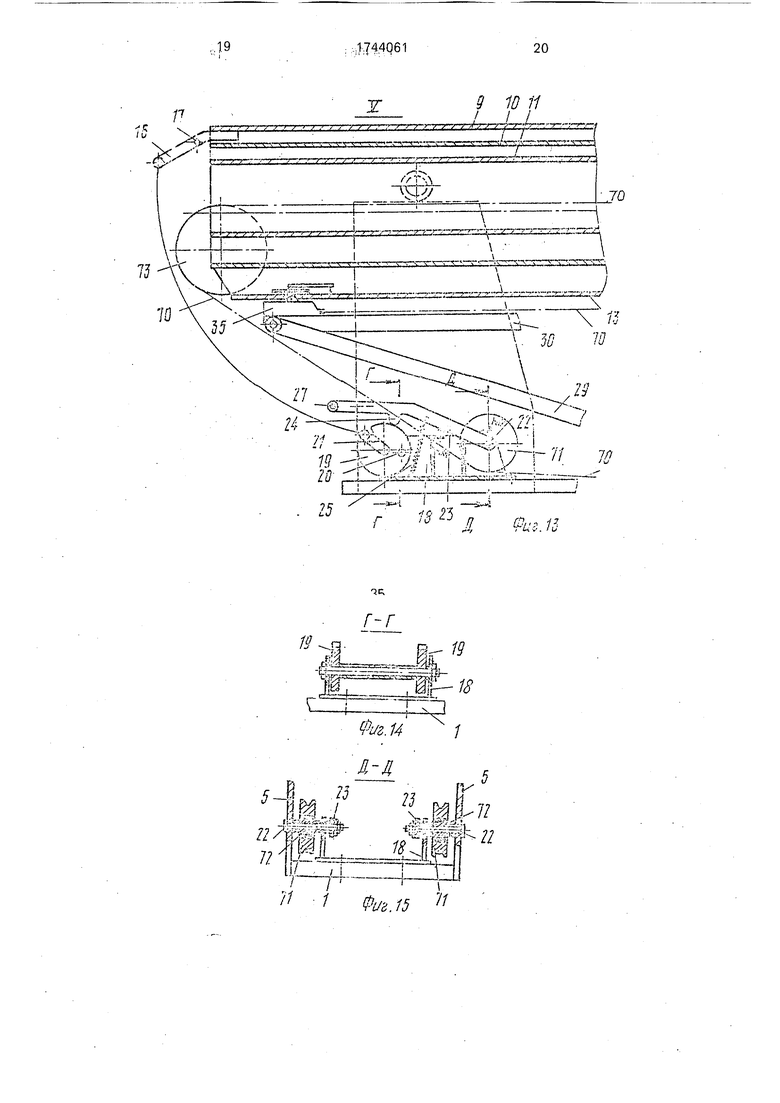
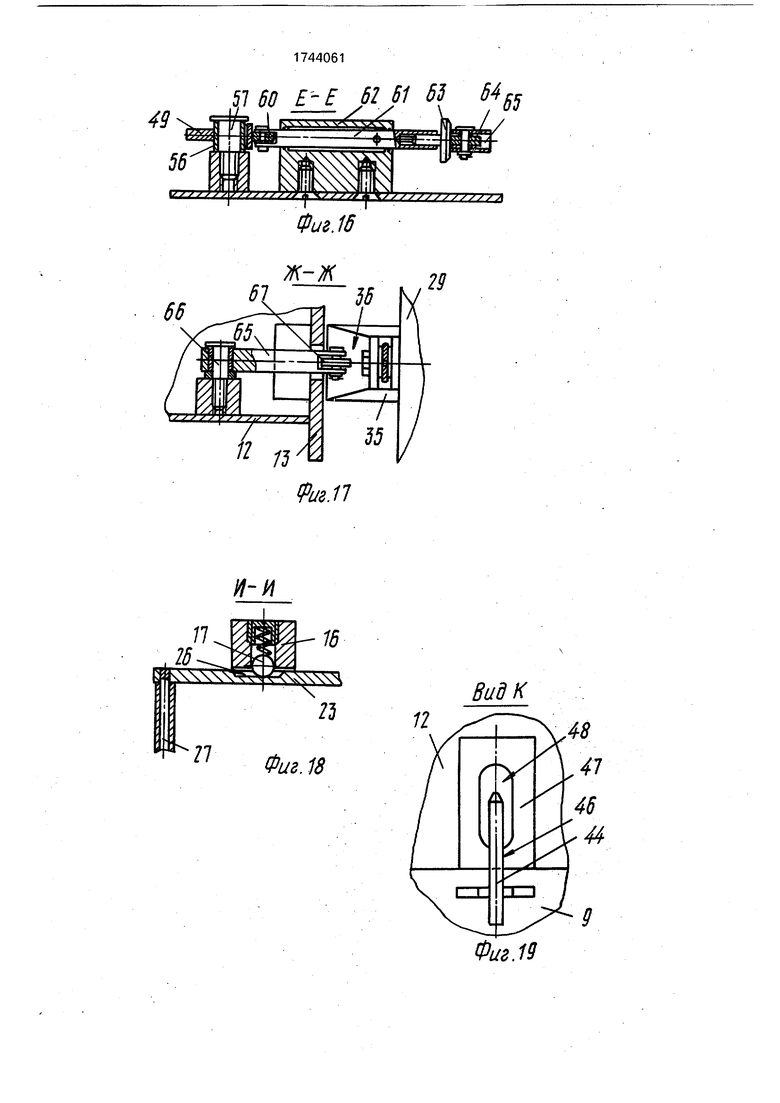
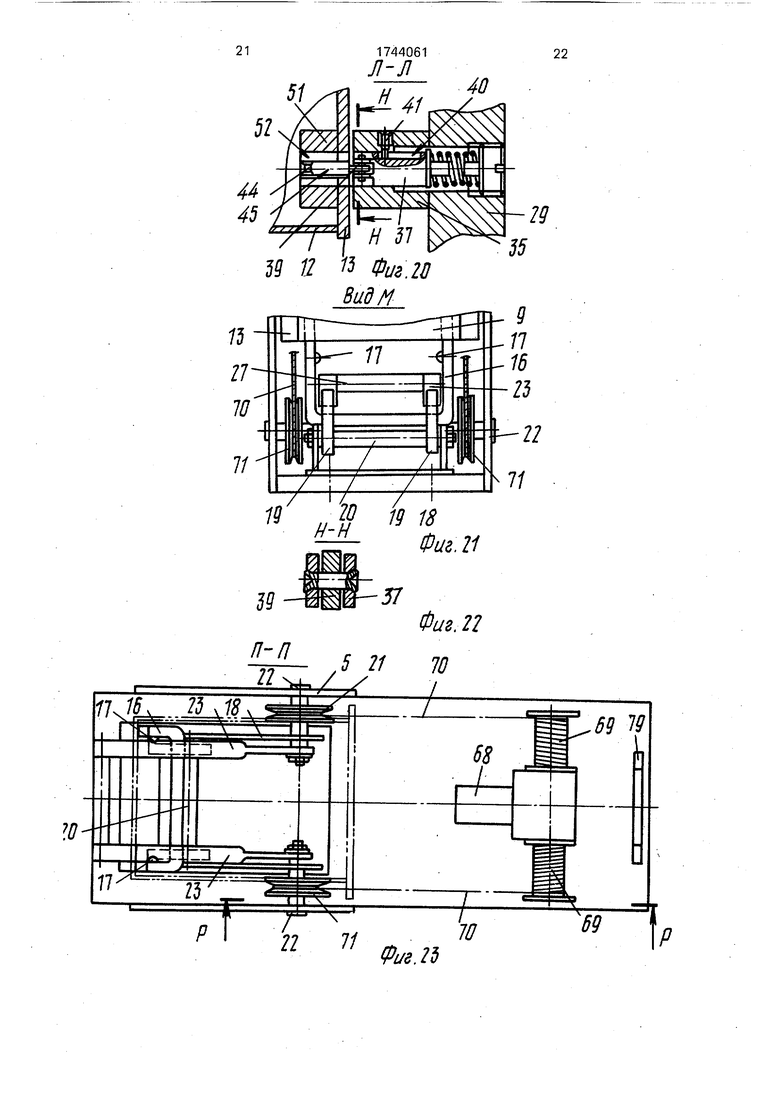
На фиг. 1 показан подъемник, общий вид; на фиг. 2 - подъемник в сложенном положении при транспортировке; на фиг. 3 - подъемник в рабочем положении; на фиг. 4 - кинематическая схема тросового привода; на фиг. 5 - узел I на фиг. 1 на фиг. 6 - сечение А-А на фиг. 5; на фиг. 7 узел II на фиг. 1 (фиксированное состояние мачты в вертикальном положении); на фиг. 8 - то же, расфиксированное положение мачты перед ее опрокидыванием; на фиг. 9-узел III на фиг. 7; на фиг. 10-сечение Б-Б на фиг. 9; на фиг. 11 - узел IV на фиг. 3: на фиг. 12 - сечение В-В на фиг. 1; на фиг. 13 - узел V на фиг. 2; на фиг. 14 - сечение Г-Г на фиг. 13; на фиг. 15 - сечение Д-Д на фиг. 13; на фиг. 16 - сечение Е-Е на фиг. 5: на фиг. 17 - сечение Ж-Ж на фиг. 5; на фиг. 18 - сечение И-И на фиг. 8; на фиг 19 - вид К на фиг. 5; на фиг. 20 - сечение Л-Л на фиг. 5; на фиг. 21 - вид М на фиг. 7: на фиг. 22 - сечение Н-Н на фиг. 20; на фиг. 23 - сечение П-П на фиг. 7; на фиг. 24 - сечение Р-Р на фиг. 23; на фиг. 25 - узел VI на фиг. 1; на фиг. 26 - сечение Т-Т на фиг, 25.
Подъемник содержит раму 1 на колесах 2, имеющую выдвижные или откидные аут- ригеры 3 с винтовыми опорами 4. На раме 1 жестко крепятся две стойки 5, имеющие цапфы 6 для осей 7. мачты 8. Оси 7 расположены параллельно раме 1. Мачта состоит из нескольких выдвижных секций (например трех) коробчатого типа, где нижняя секция 9 может вращаться вокруг осей 7 между
стойками 5. Промежуточная секция 10 вставляется в секцию 9, а оконечная секция 11 вставляется в секцию 10 и имеет вверху оголовок 12, представляющий собой точный профиль нижней секции 9 и совпадающий по направляющим 13. Секции 9, 10, 11 снабжены распорными роликами 14. 15, при этом нижняя секция 9 имеет скобу 16, жестко закрепленную на ее задней стенке, а на боковых ветвях этой скобы, с внутренней стороны, размещены подпружиненные фиксирующие шарики 17.
Для фиксации мачты 8 в вертикальном положении на раму 1 между стойками 5 устанавливается запорное устройство, согласующееся с движением скобы 16 и состоящее из съемного кронштейна 18, в котором размещены с одной стороны свободно падающие диски 19. расположенные на валу 20 с эксцентриситетом относительно центров этих дисков имеющие пазы 21 с заходом для скобы 16. При этом с другой стороны кронштейна 18 на осях 22 размещены рычаги 23, имеющие фиксирующие выступы 24, выполненные точно по ширине пазов 21 и запирающие в них скобу 16. Рычаги 23 связаны с кронштейном 18 натяжной пружиной 25, а по боковым поверхностям прямолинейных участков выполнены выточки 26. Для облегчения работы с рычагами последние связаны между собой рукояткой 27.
Грузоподъемник оборудован подъемной платформой 28. перемещающейся по направляющим 13 и представляющей собоР деформирующийся параллелограмм, состоящий из пола 29, вертикальных стоек 30, горизонтальных планок 31 и диагональных ломающихся связок 32л Подвижная платформа 28 снабжена кронштейнами 33, на которых с двух сторон направляющей 13 расположены опорные ходовые ролики 34.
Кроме того, к полу 29 со стороны направляющей 13 жестко прикреплены упоры 35, имеющие в верхней части скосы 36, а в нижней части располагаются фиксаторы 37 положения подъемной платформы, выпол- ненные в виде штоков с роликами и подпружиненные пружиной 38. Фиксаторы 37 и пружины 38 заневоливаются в отверстиях упоров 35 с помощью резьбовых пробок 39, а чтобы фиксаторы 37 не вращались в про- цессе движения подъемной платформы 28, в них выполнены пазы 40, в которых установлены винты 41.
В нижней части направляющих 13, расположенных в нижней секции 9, выполнены фасонные отверстия 42 с диаметром, равным диаметру ролика фиксатора 37, и конус 43, больший диаметр которого равен диаметру штока фиксатора 37.
В верхней части нижней секции 9, по линии движения фиксаторов 37, установлены пластины 44 со скосом 45. которые в процессе перемещения подъемной платформы 28 входят в щели 46 бобышек 47, в которых выполнены овальные гнезда для охвата наружной поверхности фиксаторов 37. Бобышки 47 установлены в нижней части направляющих 13 оголовка 12.
Подъемник снабжен сцепным устройством для стыкования направляющих 13, вы- полненным в виде установленного на полуоси 48 крюка 49. Полуось 48 смонтирована в верхней части нижней секции 9. Нижний конец крюка снабжен упором 50. взаимодействующим с опорным винтом 51, а верхний конец крюка снабжен захватом
52,имеющим захватывающую поверхность
Захват 52 имеет также торцовую 58 и наклонную 59 поверхности, которые в процессе работы взаимодействуют с роликом 56 оголовка 12 и давящим роликом 60 штока 61, расположенного в корпусе 62 оголовка 12 и имеющего на другом своем конце опорную площадку 63. При этом опорная площадка 63 взаимодействует с нажимным роликом 64 коромысла 65, установленного на оси 66 и имеющего также управляющий ролик 67, который в процессе перемещения подъемной платформы 28 взаимодействует со скосом 36 упора 35.
Подъемник имеет электролебедку 68 с двумя разнонаправленными барабанами
69, установленную на раме 1 и связанную при помощи тросов 70 с выдвижными секциями мачты 8, причем тросы 70 с барабане 69 проходят через блоки 71, установленные между кронштейнами 18 и стойками 5 нг осях 22 и сферических подшипниках 72, за тем через блоки 73 и 74, установленные со ответственно на нижнем и верхнем конца; нижней секции 9, блоки 75 и 76, располо женные соответственно на нижнем и верх нем концах промежуточной секции 10 блоки 77 и 78, расположенные на нижнем i/ верхнем концах оконечной секции 11. npi/ этом свободные концы тросов 70 закреплены на упорах 35 подвижной платформы 28.
Для упора в транспортном положении мачты 8 на раме 1 жестко закреплена стойка 79, а управление конечными положениями подъемной платформы 28 и мачты 8 осуществляется конечными выключателями МК1- МК5.
Подъемник работает следующим образом.
Подъемник в транспортном положении (фиг. 2) транспортируется на рабочее место, где при необходимости выдвигаются (или откидываются) аутригеры 3, при этом подъемник устанавливается на винтовых опорах 4. Включается электропривод 68, и тросы 70 начинают наматываться на барабаны 69. Свободно падающие диски 19 упираются в кронштейны 18. повернувшись своими пазами 21 навстречу скобе 16 нижней секции 9 мачты 8, а рычаги 23 упираются своими фиксирующими выступами 24 в эти диски с помощью пружин 25. кроме того, фиксаторы 37, размещающиеся в фасонных отверстиях 42 и опирающиеся своими конусами в конуса 43 (фиг. 9, 13). не дают возможности сдвинуться во время вертикализации мачты 8 подъемной платформе 28. Движение происходит до вертикализации мачты 8. При этом скоба 16 попадает в паз 21 падающих дисков 19, поворачивает их вокруг вала 20, пока фиксирующие выступы 24 рычагов 23 не попадают также в пазы 21 этих дисков, фиксируя их. а рычаги 23 вступают в контакт с конечным выключателем М1, отключая привод электролебедки 68.
Для выдвижения подъемной платформы 28 на необходимую высоту необходимо обслуживающему персоналу перейти (разместиться) на эту платформу, откуда можно производить ее подъем и опускание, а также управлять выдвижением секций 10, 11 мачты 8. При подъеме платформа 28 достигает оголовка 12, перемещаясь по направляющим 13. При этом ролики фиксаторов 37 прокатываясь по направляющим 13 и скосам 45 пластин 44 под действием пружины
38 попадают вместе с фиксаторами 37 в гнезда бобышек 47. Фиксаторы 37, упираясь в верхние края овальных гнезд бобышек 47, соединяют оголовок 12 и подвижную платформу 28 между собой, прекращая дви- жение последней вверх. При подходе в крайнее верхнее положение упоры 35 своими скосами 36 начинают давить на управляющие ролики 67, находящиеся на коромыслах 65. Последние начинают пово- рачиваться вокруг своих осей 66 и нажимными роликами 64 давят на опорные площадки 63 штока 61, который двигается поступательно внутри корпуса 62. В результате перемещения штока 61 он своими давящими роликами 60 давит на торцовую поверхность 58 захвата 52 крюка 49, выводя его из зацепления с роликом 56 и отклоняя его вокруг полуоси 48. Как только фиксаторы 37 упрутся в гнезда бобышек 47, начинается перемещение секции 11 вверх, так как крюки 49 отклонены таким образом, что ролики 56, расположенные на полуосях 57 оголовка 12, проходят мимо захватов 52, причем после прохождения роликов 56 под действием пружин 55 крюки 49 возвращаются на место, упираясь упорами 50 в опорные винты 51. В случае подъема платформы 28 на максимальную высоту, лебедка 68 отключается упором, расположенным на секции 10 и вступающим в контакте конечным выключателем МК2.
При опускании подъемной платформы 28 в нижнее положение последняя может подвинуться вниз по оголовку 12 по направляющим 13 на величину, равную длине гнезда бобышек 47. При этом она упрется фиксаторами 37 в нижние края гнезд бобышек 47, не соскакивая с оголовка 12. Увели- чение длины тросов 70 (размотка их с барабанов 69) приводит к опусканию секций 10,11 внутрь нижней секции 9, причем, если произойдет заедание какой-либо из этих секций между собой, подъемная платформа 28 не сможет сойти с оголовка 12 до тех пор. пока секции 10,11 не встанут на свои места. При этом наклонные поверхности 59 контактируют с роликами 56 и отклоняют крюки 49 от исходного положения, а ролики фиксато- ров 37, перемещаясь по скосам 45. отклоняют последние внутрь платформы 28, которая опускается по направляющим 13. Вместе с подъемной платформой 28 опускаются и упоры 35, освобождая управляющие ролики 67 и давая возможность поворачиваться коромыслом 65 на осях 66. Под действием пружин 55 крюки 49 становятся на место в исходное положение, давят своей торцовой поверхностью 58 на давящие ролики 60 штоков 61. которые перемещаются и своими опорными площадками 63 давят на нажимные ролики 64, поворачивая коромысла 65. При перекрытии захватами 52 полуосей 57 роликов 56 ввиду выполнения поверхностей захватов по радиусу осуществляется фиксация выдвижных секций 10, 11 мачты 8 и предотвращается их выдвижение до тех пор, пока подъемная платформа 28 не займет своего крайнего положения на оголовке 12 при этом движении. При дальнейшем опускании подъемной платформы 28 вниз последняя попадает своими фиксаторами 37 в фигурные отверстия 42 и конуса 43, фиксируясь в нижнем положении, при этом фиксатор 37 нажимает на опору рычага 80. а последний - на конечный выключатель МКЗ, отключая электропривод 68.
Для принятия подъемником транспортного положения необходимо сойти с подъемной платформы 28, за рукоятку 27 поднять рычаги 23, зафиксировать их с помощью фиксирующих шариков 17 в верхнем положении. При этом фиксирующие выступы 24 выходят из пазов 21 свободно падающих дисков 19. освобождая их. кроме того, размыкается конечный выключатель МК1 и включается МК4, давая возможность дальнейшей работе электролебедки 68. Привод электролебедки 68 с земли включается на дальнейшую размотку тросов 70. Мачта 8 начинает опрокидываться, скоба 16 смещается, выходя из пазов 21 свободно падающих дисков 19, которые также поворачиваются и занимают исходное положение. Вместе со скобой 16 происходит смещение фиксирующих шариков 17. которые выходят из выточек 26. освобождая рычаги 23 от фиксации, которые под действием пружин 25 опускаются на свободно падающие диски 19 своими фиксирующими выступами 24, готовые в случае поворота этих дисков вверх пазом 21 вновь их зафиксировать. При этом пол 29 подъемной платформы 28 своим краем упирается в раму 1. диагональные связи 32 складываются, вертикальные стойки 30 и горизонтальные планки 31 начинают перемещаться так, что при полом опрокидывании мачты 8 подъемная платформа 28 принимает ромбовидную форму, причем положение фиксаторов 37 в фигурных пазах направляющей 13 не дает возможности эгой площадке сдвинуться вдоль направляющих 13. Электропривод 68 работает до тех пор, пока выдвижная мачта 8 не займет горизонтального положения и не вступит в контакт с конечным выключателем МК5, который и отключает ее привод.
Формула изобретения 1. Подъемник, содержащий раму с ходовыми колесами и аутригерами, две стойки, смонтированные на раме, телескопическую мачту с промежуточными и оконечной вы- движными секциями, нижняя из которых шарнирно закреплена на горизонтальной оси между стойками, оголовок, смонтированный на оконечной секции, направляющие, закрепленные последовательно друг за другом на нижней секции и оголовке соответственно и ориентированные вдоль оси мачты, подъемную платформу с опорными ходовыми роликами, размещенными в направляющих, фиксатор положения подъ- емной платформы относительно направляющих, запорное устройство для фиксации вертикального положения мачты, тросовый привод, выполненный в виде тяговой электролебедки, смонтированной на раме, трос которой последовательно запасован между нижними и верхними блоками, смонтированными на каждой секции, а ходовой конец его связан с подъемной платформой для установки мачты в вертикальное положение, выдвижения секций и перемещения подъемной платформы по направляющим, и устройство управления приводом, отличающийся тем, что, с целью повышения надежности работы подъемника, последний снабжен сцепным устройством для стыкования направляющих, выполненным в виде накидного подпружиненного относительно нижней секции крюка, шарнирно связанного с верхней ее частью с возможностью or- раниченного поворота в плоскости, параллельной плоскости перемещения подъемной платформы, полуоси с роликом, закрепленной в нижней части оголовка для взаимодействия с захватывающей поверх- ностью крюка, и узла расстыковки направляющих, размещенного в нижней части оголовка и содержащего упор со скосом, закрепленный на тыльной стороне подъемной платформы, двуплечее коромысло, шар- нирно в средней части связанное с оголовком, одно плечо которого выполнено с возможностью взаимодействия со скосом упора, а другое плечо кинематически связа
но с торцовой поверхностью крюка, при этом фиксатор положения подъемной платформы выполнен в виде штока, размещенного в подъемной платформе с возможностью возвратно-поступательного горизонтального перемещения, и двух ловушек, один конец штока подпружинен относительно подъемной платформы, а на другом его конце закреплена конусная вилка с фиксирующим роликом, одна ловушка размещена в нижней части нижней секции и образована фасонным отверстием, охватывающим в нижнем положении подъемной платформы фиксирующий ролик и конусную вилку, другая ловушка размещена в нижней части оголовка и содержит, бобышку с гнездом для охвата наружной поверхности другого конца штока при размещении подъемной платформы на оголовке подъемника, при этом в верхней части нижней секции закреплена пластина со скосом, ориентированная вдоль оси симметрии гнезда и взаимодействующая с фиксирующим роликом при стыковке направляющих. 2. Подъемник по п. 1, отличающий- с я тем, что запорное устройство содержит съемный кронштейн, смонтированный на раме, диск с радиальным пазом, эксцентрично посредством шарнира связанный с кронштейном с возможностью ограниченного качания в плоскости поворота мачты, скобу, консольно закрепленную на нижнем конце нижней секции и снабженную штифтом для взаимодействия с пазом диска в процессе подъема мачты, и рычаг, подпружиненный относительно рамы и шарнирно связанный одним своим концом с кронштейном с возможностью качания в плоскости поворота диска, другой конец рычага снабжен рукояткой, а в средней его части выполнен фиксирующий выступ, поочередно взаимодействующий с цилиндрической поверхностью диска и его радиальным пазом,, для удержания штифта при вертикальном положении мачты на боковой поверхности скобы закреплен подпружиненный шарик, а на боковой поверхности рычага выполнена выточка для размещения в ней подпружиненного шарика.
n
U
Лу
Flfv
Xi
Z
75
8
i
J5jp 7л JL / 30 г.г
7
Z
$/ /
35 ,
. #
о
01
№ //Т
t-i
9 Щ
01
д Щ
V
L90t7t7il
CL
Ч5а
CJ4 «Л
N
от
3
W СП
-J ji. j. о ст
м
I
О)
Ж
51
Фиг. 11
11 Фие.П
10
В-8
;-г-сл
JV Ј3 «л
СО
л
л
-vl -fc. Л
-О О)
5$
6
xew
м а аи з-з дай1
#
U
91
и -и
И Щ
ж-ж
91 гпф
I90t7t7il
21
/ /
W 11 К Фиг.IS Вид/1
11
// & / 18 Н НФиг. 21
1744061
Л-Л
22
35
Фиг. 2Ь
Фиг. 25
35 Фиг. 26
| Ленточный консольный отвалообразователь | 1960 |
|
SU135452A1 |
