(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля призмы | 1987 |
|
SU1522031A1 |
| Навигационный секстан | 1983 |
|
SU1244488A1 |
| Способ контроля шкал | 1983 |
|
SU1185077A1 |
| Устройство для каботажного плавания и способ каботажного плавания | 1983 |
|
SU1204921A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ УГЛОМЕРНОГО ПОВОРОТНОГО СТОЛА | 2021 |
|
RU2779239C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ИЗМЕРЕНИЙ ГОРИЗОНТАЛЬНЫХ И ВЕРТИКАЛЬНЫХ УГЛОВ ГЕОДЕЗИЧЕСКИХ УГЛОМЕРНЫХ ПРИБОРОВ | 2011 |
|
RU2463561C1 |
| Устройство для измерения углов поворота объекта | 1986 |
|
SU1388714A1 |
| Способ определения погрешностей изготовления прямых двугранных углов зеркально-призменных элементов и устройство для его осуществления | 1977 |
|
SU693110A1 |
| Устройство для производства промерных работ в видимости береговых объектов | 1977 |
|
SU699318A1 |
| ОПТИЧЕСКАЯ СИСТЕМА СТЕНДА ДЛЯ ИЗМЕРЕНИЯ ГОРИЗОНТАЛЬНОГО УГЛА | 2013 |
|
RU2563322C2 |
Изобретение относится к машиностроению, а именно к средствам контроля зубчатых передач. Цель изобретения - измерение погрешности в условиях, имитирующих эксплуатационные, за счет снятия дополнительных отсчетов в положении звеньев секстанта в рабочем состоянии. Это достигается тем, что дополнительно проводят две серии измерений с установкой ведущего звена в нулевое положение при обратном его ходе, а отсчет углов производят при прямом и обратном ходе ведущего звена (червяка). Полученные данные используют для расчета поправки. 1 ил.
Изобретение относится к машиностроению, а именно к средствам контроля зубчатых передач.
Цель изобретения - измерение погрешности в условиях, имитирующих эксплуатационные, за счет снятия дополнительных отсчетов в положении звеньев секстана в рабочем состоянии
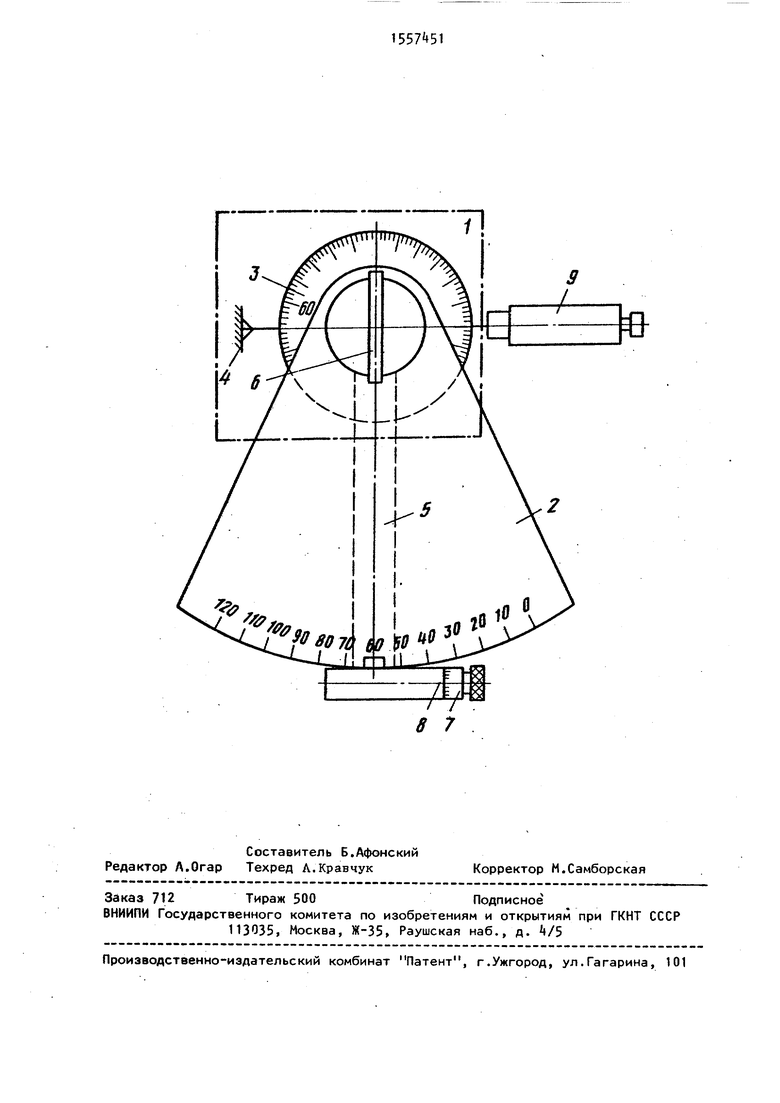
На чертеже показана принципиальная схема устройства для реализации предлагаемого способа измерения погрешности .
Устройство содержит поворотный стол 1, на котором установлен контролируемый секстан 2. Поворотный стол 1 включает круговую прецизионную шкалу 3 и индекс k. В качестве индекса Ь может быть использован микроскоп. Секстан содержит червячную пару, при этом ведущее звено (червяк) закреплен в корпусе и через алидаду 5 связан с зеркалом 6, С червяком связан отсчетный барабан 7, на корпусе червяка нанесен индекс 8 барабана 7. На подставке установлен автоколлиматор 9.
Для осуществления способа устанавливают в нулевое положение поворотные стол 1 и с прямого хода в нулевое положение устанавливают барабан 7 червяка. Устанавливают в нулевое положение автоколлиматор 9. Поворачивают с прямого хода червяк на угол Роб(), при этом алидада 5 с зеркалом 6 поворачивается на угол оЈ + &о1м. Поворачивают стол 1 на угол об в направлении, противоположном направлению поворота алидады 5. По автоколлиматору снимают первый (i-1) отсчет
сл сл
sl
4 СЛ
315
Act,, oiJi -oi/P., равный погрешности цепи в положении оЈ. Затем устанавливают с прямого хода барабан 7 червяка в нулевое положение и поворачивают с прямого хода червяк на угол P2ot(i 2). Алидада 5 с зеркалом 6 поворачивается на угол 2оЈ+ Ao/,a(). Поворачивают стол 1 на угол 2dL в направлении, противоположном направлению поворота алидады 5, и по автоколлиматору снимают отсчет Ы12 rf,, равный погрешности цепи в положении 2оЈ. Последовательно определяют погрешность йбЈм в п положениях. После проведения первой серии отсчетов проводят вторую, в которой червяк в положение Pi об устанавливают с обратного хода, а положение нуля устанавливают с прямого хода. В резуль- тате, получают вторую серию отсчетов ud7; . Проводят третью серию, в которой перед установкой червяка с прямого хода в положение Pi об устанавливают в нулевое положение (1Ю) с об- ратного хода и снимают отсчеты А,; .
Затем проводят четвертую серию отсчетов, в которой перед установкой червяка с обратного хода в положение Pi об устанавливают в нулевое положение () с обратного хода и снимают отсчеты &оЦ;.
I
Определяют погрешность цепи в i-x положениях по формуле
. . Aeir, +АО + ДОЦ; + АьЦ; иj.
П Р
и м е р. Для секстана имеем P«720,«i 5°. При с прямого хода червяк поворачивают на угол 5 3600°. Алидада с зеркалом поворачивается на угол оЈ+AtfH, например 45 на угол 5е+10 . Поворачивают стол на угол 5е в направлении, противоположном направлению алидады,- и снимают первый отсчет &oiM 5°+10 3600°/720 10 ,
Поворачивают червяк на угол P2cl 720 2 -5° 7200°. Алидада с зеркалом поворачивается на угол 2« 5°+5 Р . Поворачивают стол на угол 2- 5° и снимают отсчет с автоколлиматораоС 5 . Аналогично выполняют вторую серию отсчетов, в которой червяк устанавливают в положение Pio6 с обратного хода. В соответствии с описанием снимают отсчеты Л ei , и A Ы4|.
Таким образом проводят измерение погрешности цепи в условиях, имитирующих эксплуатацию цепи.
Формула изобретения
5 0 5
0
5
0
45
Способ измерения погрешности кинематической цепи, заключающийся в том, что сравнивают углы поворота ведущего звена с углом поворота ведомого звена при снятии двух серий отсчетов с установкой ведущего звена в нулевое положение при прямом его ходе, причем в первой серии производят отсчеты углов при прямом ходе ведущего звена, во второй серии - при обратном ходе ведущего звена, и по среднему значению из величин, полученных при снятии отсчетов, определяют погрешность кинематической цепи, отличающийся тем, что, с целью измерения погрешности в условиях, имитирующих эксплуатационные, производят снятие третьей и четвертой серий отсчетов с установкой ведущего звена в нулевое положение при обратном его ходе, причем в третьей серии производят отсчет углов при прямом ходе ведущего звена, в четвертой серии - при обратном ходе ведущего звена, и используют эти данные для определения погрешности кинематической цепи. i
| Курс кораблевождения, т | |||
| V, кн | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Секстаны | |||
| Измерители времени | |||
| Л.: Изд | |||
| Управление начальника гидрографической службы ВМФ, I960, с | |||
| Автоматическая телефонная система | 1915 |
|
SU880A1 |
