тиристорный реверсор 6 к обмотке 7 возбуждения, Тиристорный реверсор 6 управляется четырехканальным распределителем 13 импульсов через формирователи И, 15, 16, 17. Электропривод управляется,по току возбуждения, моменту и скорости. Повышение надежности обеспечивается за счет упрощения силовой цепи возбуждения электродвигателя. 1 ил.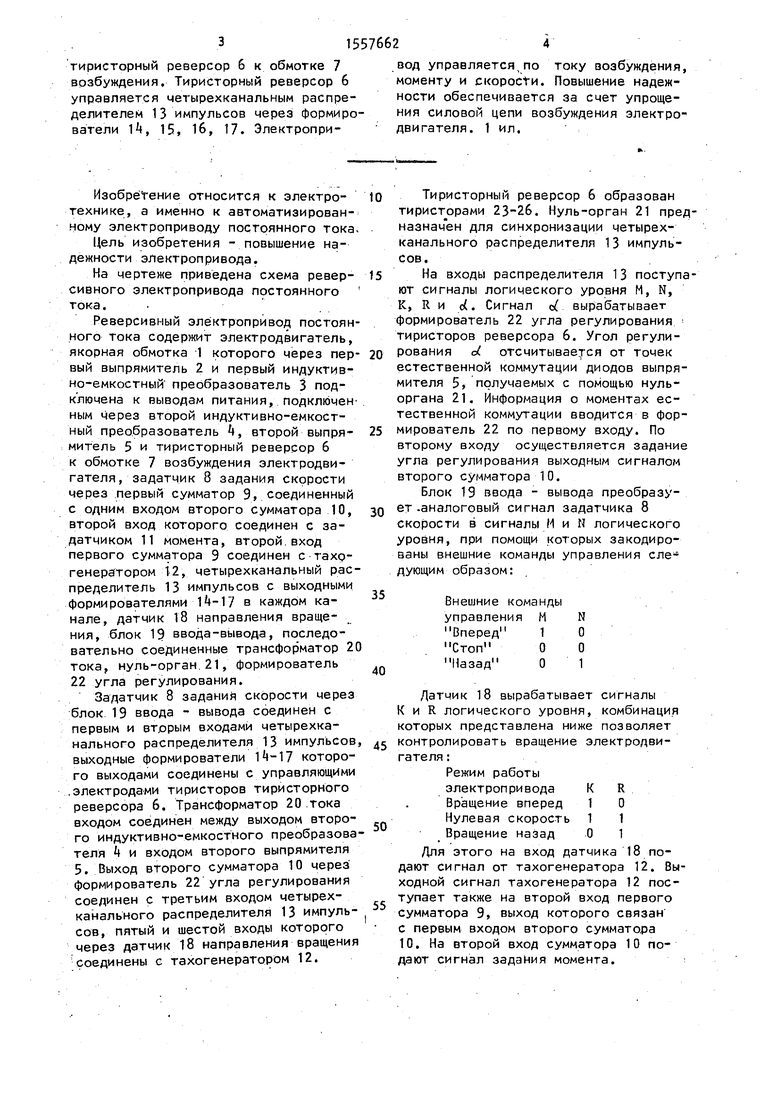

| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный электропривод | 1991 |
|
SU1791951A1 |
| Электропривод постоянного тока | 1980 |
|
SU904168A1 |
| Электропривод постоянного тока | 1985 |
|
SU1272385A1 |
| Реверсивный электропривод постоянного тока | 1980 |
|
SU930548A1 |
| Реверсивный электропривод постоянного тока | 1989 |
|
SU1598094A1 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| Электропривод | 1981 |
|
SU957394A1 |
| Реверсивный тиристорный электропривод постоянного тока | 1980 |
|
SU951614A1 |
| Электропривод постоянного тока | 1986 |
|
SU1390758A1 |
| РЕВЕРСИВНЫЙ ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД | 1992 |
|
RU2079963C1 |
Изобретение относится к электротехнике, а именно к автоматизированным электроприводам постоянного тока. Цель изобретения - повышение надежности. Реверсивный электропривод содержит электродвигатель, якорная обмотка 1 которого через первый выпрямитель 2 и первый индуктивно-емкостный преобразователь 3 подключена к выводам питания, подключенным через второй индуктивно-емкостной преобразователь 4, второй выпрямитель 5 и тиристорный реверсор 6 к обмотке 7 возбуждения. Тиристорный реверсор 6 управляется четырехканальным распределителем 13 импульсов через формирователи 14, 15, 16, 17. Электропривод управляется по току возбуждения, моменту и скорости. Повышение надежности обеспечивается за счет упрощения силовой цепи возбуждения электродвигателя. 1 ил.
Изобретение относится к электро- технике, а именно к автоматизированному электроприводу постоянного тока,
Цель изобретения - повышение надежности электропривода.
На чертеже приведена схема ревер- сивного электропривода постоянного тока.
Реверсивный электропривод постоянного тока содержит электродвигатель, якорная обмотка 1 которого через пер- вый выпрямитель 2 и первый индуктивно-емкостный преобразователь 3 подключена к выводам питания, подключен ным через второй индуктивно-емкостный преобразователь , второй выпря- митель 5 и тиристорный реверсор 6 к обмотке 7 возбуждения электродвигателя, задатчик 8 задания скорости через первый сумматор 9, соединенный с одним входом второго сумматора 10, второй вход которого соединен с за- датчиком 11 момента, второй вход первого сумматора 9 соединен с тахо- генератором 2, четырехканальный распределитель 13 импульсов с выходными формирователями в каждом канале, датчик 18 направления враще- . ния, блок 19 ввода-вывода, последовательно соединенные трансформатор 20 тока, нуль-орган 21, формирователь 22 угла регулирования.
Задатчик 8 задания скорости через блок 19 ввода - вывода соединен с первым и вторым входами четырехка- нального распределителя 13 импульсов выходные формирователи которого выходами соединены с управляющими электродами тиристоров тиристорного реверсора 6. Трансформатор 20 тока входом соединен между выходом второ- го индуктивно-емкостного преобразователя k и входом второго выпрямителя 5. Выход второго сумматора 10 через формирователь 22 угла регулирования соединен с третьим входом четырех- канального распределителя 13 импуль- сов, пятый и шестой входы которого через датчик 18 направления вращения соединены с тахогенератором 12.
Тиристорный реверсор 6 образован тиристорами 23-26. Нуль-орган 21 пре назнач ен для синхронизации четырех- канального распределителя 13 импульсов.
На входы распределителя 13 поступют сигналы логического уровня М, N, К, R и d. Сигнал о вырабатывает формирователь 22 угла регулирования тиристоров реверсора 6. Угол регулирования d отсчитывается от точек естественной коммутации диодов выпрямителя 5, получаемых с помощью нуль- органа 21. Информация о моментах естественной коммутации вводится в формирователь 22 по первому входу. По второму входу осуществляется задани угла регулирования выходным сигналом второго сумматора 10.
Блок 19 ввода - вывода преобразует .аналоговый сигнал задатчика 8 скорости в сигналы М и N логического уровня, при помощи которых закодированы внешние команды управления следующим образом:
Внешние команды
управления МN
Вперед 1О
Назад 01
Датчик 18 вырабатывает сигналы К и R логического уровня, комбинация которых представлена ниже позволяет контролировать вращение электродвигателя :
Режим работы электропривода К R Вращение вперед 1 О Нулевая скорость 1 1 Вращение назад 0 1 Для этого на вход датчика 18 подают сигнал от тахогенератора 12. Выходной сигнал тахогенератора 12 поступает также на второй вход первого сумматора 9, выход которого связан с первым входом второго сумматора 10. На второй вход сумматора 10 подают сигнал задания момента.
5 1
Минимизированные логические уравнения выходных сигналов распределителя 13 имеют вид.
w
Wn N(KR VHK UMR) V RRct , 2S M(KR VNK VNR) V KRd .
Электропривод работает следующим образом.
Устанавливают задатчик 8 скорости в нулевое положение и подключают электропривод к источнику переменного напряжения. Первые индуктивно- емкостный преобразователь 3 и выпрямитель 2 создают в якорной цепи элек родвигателя номинальный ток якоря.
Индуктивно-емкостный преобразователь k и выпрямитель 5 при этом нулевом положении замыкаются накоротко тиристорами реверсора 6. При этом ток в цепи обмотки 7 возбуждения двигателя будет равен нулю и вращение якоря отсутствует.
Подают сигнал задания пускового момента, а задатчиком 8 задают необходимый уровень скорости электропривода. На входах распределителя 13 начинает действовать соответствующая комбинация сигналов, при которой импульсы управления поступают, например, на тиристоры 23, 26 в точках естественной коммутации тока, а на тиристоры 2k, 25 - с задержкой на угол регулирования Ж . В обмотке 7 возбуждения электродвигателя форсированно устанавливается заданный суммарным сигналом задатчиков 8 и 11 ток возбуждения. Электродвигатель разгоняется практически с неизменным ускорением.
По мере разгона сигнал обратной связи по скорости, получаемый с помощью тахогенератора 12, вычитается из сигнала задатчика 8 скорости. Это приводит к уменьшению сигнала на выходе второго сумматора 10 и, следовательно, к уменьшению угла регулирования. Уменьшение угла регулирования приводит, в свою очередь, к уменьшению тока в обмотке 7 возбуждения двигателя. Указанный процесс будет протекать до тех пор, пока электромагнитный момент, развиваемый электродвигателем, не сравняется с моментом сопротивления на его валу. При этом наступает установившийся режим работы электропривода.
0
5
0
5
Реверс электропривода осуществляется за счет форсированного изменения направления тока в обмотке 7 возбуждения электродвигателя. Для этого снимают сигналы управления с тиристоров 23 и 26 реверсора и подают их в точках естественной коммутации на диагонально противоположные ти- ристооы 2k и-25. По мере разгона.. электропривода до скорости задания подключаются тиристо.оы 23 и 26 с углом регулирования.
Повышение надежности реверсивного электропривода достигается за счет упрощения силовой цепи возбуждения электродвигателя. формула изобретения
Реверсивный электропривод пос-. тоянного тока, содержащий электродвигатель, якорная обмотка которого через первый выпрямитель и первый индуктивно-емкостный преобразователь подключена к выводам питания, подключенным через второй индуктивно- емкостный преобразователь, второй выпрямитель и тиристорный реверсор к обмотке возбуждения электродвигателя, задатчик скорости, через первый сумматор соединенный с одним входом второго сумматора, второй вход которого соединен с задатчиком мог мента, второй вход первого, сумматора соединен с тзхогенератором, отличающийся тем, что, с целью повышения надежности, в него введены четырехканальный распределитель импульсов с выходными формирователями в каждом канале, датчик направления вращения, блок ввода-вывода, последовательно соединенные трансформатор тока, нуль-орган, формирователь угла регулирования, при этом задатчик скорости через блок ввода-вывода 5 соединен с первым и вторым входами четырехканального распределителя импульсов, выходные формирователи которого выходами соединены с управляющими электродами тиристоров тиристорно- 0 го реверсора ,трансформатор тока входом соединен между выходом второго индуктивно-емкостного преобразователя и входом второго выпрямителя, выход второго сумматора через формирователь угла регулирования соединен с третьим входом четырехканального распределителя импульсов, пятый и шестой входы которого через датчик направления вращения соединены с тахогенератором.
0
5
0
| Двухзонный вентильный электропривод | 1979 |
|
SU886178A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Проблемы преобразовательной техники | |||
| Киев: Наук, думка, 1979, с.164- 167. | |||
