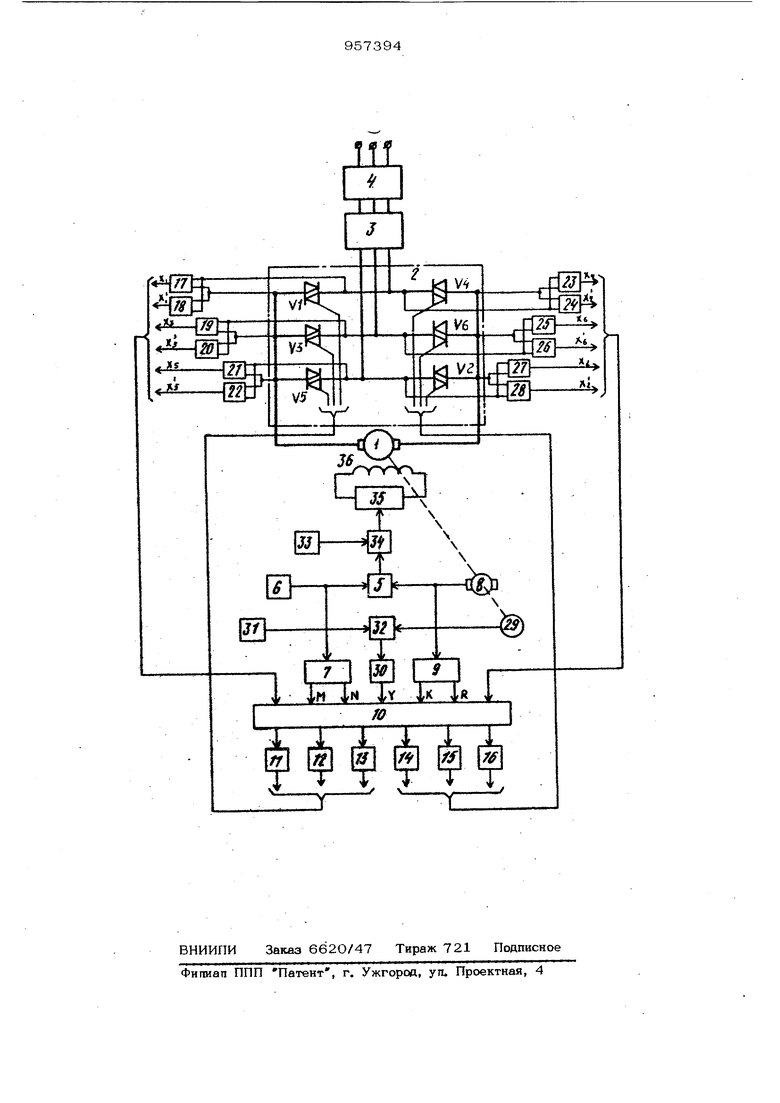
39573 торможение привода Возможно осуществить методом противовключения в цепи обмот ки возбуждения либо с применением динамического торможения. Реверсирование пр вода осуществляется путем изменения нап- 5 равления тока возбуждения. Иэ-за относительно большой постоянной времени цепи обмотки возбуждения торможение и реверс оказываются в ряде случаев недостаточно эффективными. Цель изобретения - повышение эффективности электропривода. Поставленная цель достигается .тем, что в известный электропривод дополнительно введены датчик положения, сочлененный с валом электродвигателя. блок задания положения, дополнительйыи нуль-орган и второй пороговый блок. входы которого подключены соответст&е но к блоку задания, положения и . датчику 20 положения, а выход через дополнительный нуль-орган связан с логютеским распределителем, блок задания момента, сумматор и блок управления обмоткой возбуждения, входом подключенный к сумматору, 25 однн вход которого соединен с блоком задания, момента, а второй - с первым пороговым блоком, входы каждой пары нульорганов напряжения попарно объединены . и подключены к силовым электродам зо соответствующих тиристоров преобразоватепя, На чертеже представлена схема электроприьода. Электропривод содержит электродвигатель 1, якорная обмотка кот.орого подключена -к сети через последовательно соединенные hri -фазный тиристорный преобразователь 2;, согласующий трансформатор 3 и тгндуктивнсн-емкостный преобразователь 4, пегжый пороговый блок 5, один вход которого связан с блоком 6 задания скорости и с входом блока 7 ввода-вывода, а другой - с тахогенератором 8, вал которого сочленен с валом электродвигателя l,/lii с входом датчика 9 наличия и направления вратдешш, выходы блока 7 ввода-вывода и датчика 9 наличия и направления вращения подключены к логическому распределителю 10, выходь которого через согласующие элементы 11 16 подключены к управляющим электро дам тиристоров преобразователя 2, нуль органг 17-28 напряжения, выходы которых связаны с логическим распределителем 10, а входы каждой пары нупь-.органов 17-28 напряжения попарно объединены и подключены к силовым электроto 15
обмотке 36 возбуждения двигателя.
Дакже будет равен нулю выходной сигнал нуль-органа 30, если выходное напряжение датчика 29 положения не превышает по абсолютной величине напряжение блока 31.
OaHOBpefMeHBO сигнал задания скорости поступает на вход блока 7 ввода-вывода, который преобразует аналоговый сигнал блока 6 задания скорости в единичные сигналы М и }1 , при помощи которых закодированы внешние команды управления (см. таб. 1).
Таблица 944 дам соответствующих тиристоров преобразователя 2, датчик 29 положения, сочлененный с валом электродвигателя 1, дополнительный нуль-орган 30, блок 31 заДания положения и второй пороговый блок 32, входы которого подключены соответственно к блоку 31 и датчику 29, а выход через нульг-орган ЗО соединен с логическим распределителем 10, блок 33 задания момента, сумматор 34 и блок 35 управления обмоткой 36 врзбужденш вход блока 35 подключен к сумматору 34, один вход которого соединен с блоком 33 а второй - с, первым пороговым блоком 5., Электропривод работает следующим образом. Передподключением вентильного преобразователя 2 к сети переменного напряжения подаются сигналы задания момента с выхода блока 33 задания направления и величины скорости двигателя с выхода блока 6, а также с выхода блока 31 сигнал задания положения. Сигналы задания скорости и положения поступают соответственно на входы регулируемых пороговых блоков 5 и 32 и обуславливают определенный порог срабатывания этих блоков. Если двигатель 1 не врашае тся, то шпряжение на выходе тахогенератора 8. )удет равно нулю, и выходной сигнал . поjoroBoro блока 5 также равен нулю. На входе сумматора 34 действует . „ „„..,.„.„ лишь сигнал задания момента, которым определяются при пуске выходной ток блока 35 управления и, следовательно. Датчик 9 наличия и направления вращения вырабатывает сигналы К и R комбинация которых позволяет контролировать как вращение двигателя, так и .направление этого вращения (см. табл. 2 Таблиц Логический распределитель Ю предст ляет собой комбинационную Логическую схему с элементами памяти, вырабатыва щую выходные сигналы W - 6 подавае мые через согласующие элементы 11-16 на управляющие электроды соответствутьщих тиристоров. Минимизированные логические уравнения выходных сигналов распределителя 1 имеют вид: . )vMHRV v (NRvKR)vMNK4 ; Wj X.,NY(AAKvR)vMNkRV|v vXj MYiNRvR)vMNk:RY ; W. X,NY(MKvKR)vMNRYlv (NRviiR)vMNKvlj (MVCvR vMNKRYlv. vx;,M4URv/k)vMNkRYl; ,NY(MKvKR)vMNRYlv xj MYtMRvKR)v/v RK4l-, 6 (MK-RlvMNfcRY v vx|,;M4(NRvR)vMNKR4 j В привепенных выше уравнениях К,- Х и , сигналы синхронизации, вырабатываемые нуль-органами 17-28 напряжения вентилей. Сигналы синхронизации обеспечивают выработку сигналов управ ления вентилями в точках естественно коммутации тока во всех режимах работы Длительность сигнала управления, вырабатываемого распредехтителем, определяется длительностью наличия сигнала , I инхроиизацки, который исчезает после П1:лк)(гия вентиля,, чем осуществляется минимизация мощности управления. Сели при внешней команде управления Вперед, якорь не вращается и рабочий ор ган не занимает заданное положение, то1Ш iiXOAe распределителя 1О будет действоват комбинация сигналов: N -О R 1 и 0. При наличии такой комбинации сигналов распределитель импульсов вырабатывает сигналы управления для включения вентиле11 2.1-2.6 при положительном напряжении аноа-катод. После подключения преобразователя 2 к сети в якоре двигателя 1 устанавливается ток положительной полярности. Если развиваемый двигателем момент больше момента сопротивления, происходит разгон электропривода до скорости, при которой напряжение на тахогевераторе 8 превысит напряжение сигнала блока 6 задания скорости, что приведет к открыванию порогового блока 5. После этого на второй вход сумматора. 34 поступит сиг нал, действующий встречио с сигналом блока 33 задания мс лвита, подаваемым на первый вход. Поэтому развиваемый двигателем момент будет уменьшаться до значе иия момента сопротивления, и наступит устано-вившийся режим работы зле тропривода. После отработки рабочим органом заданного перемещения сигнал, снимаемый с датчика 29 положения, сравнивается по абсолютной величине с сигналом с зааатчика 31, пороговый блок 32 открывается, и на выходе нульг-органа 30 вырабатывается единичный сигнал Y 1 При поступлении сигнала Y 1 на вход распределителя 1О последний вы- рабатывает сигналы управления тиристорами 2.1-2.6 при отрицательном напря жении анод-катод. Ток якоря меняет свое направление, под действием которого двигатель форсированно тolлv oзитcя до нуля. После получения информации о нулевой скорости с датчика 9 распределитель 1О вырабатывает сигналы управления ра вентили 21, 23 и 25. Указайные вентили включаются и создают короткозамкнутые контуры, при помощи которых замыкается выход преобразователя 2. Ток в якоре становится нулю. Вращение якоря будет отсутствовать до прихода следующей команды задания положения. Система управления позишю ого электропривода обладает универсаль остью, так как при отключении входа Y аспределителе Ю от нутпз-органа ЗО ри подаче на этот вход сигнала Y О электрофивод работает как обычный к гоментный. Таким образ OMi в предлагаемом электроприводе пуск, реверс и торможение осуествляются по якорной цепи, что ухуп шает динамические качества и повышает его эффективность. Формула из обретения Эпектропривод постоянного тока, содержащий электродвигатель независимого возбуждения, якорная обмотка которого подключена к сети через последовательн соединенные ГП -фазный тиристорный преобразователь, согласующий трюнсформатор и индуктивно-емкостный преобразователь, первый пороговый блок, один вход которого связан с блоком задания скорости и с входом блока ввода-вывода, а другой - с тахогенератором, вал которого сочленен с валом электродвигателя и с входом датчика наличия и на равления вращения, выходы .блока ввода-вывода и датчика наличия и нйправле ния вращения подключены к логическому распределителю, выходы которого через согласукяцие элементы подключены к управляющим электродам тиристоров пре разователя, нуль-органы напряжения, в ходы кото{.1х связаны с логическим рао пределителем, отличающийся тем, что с целью повышения эффективности, в него дополнительно введены датчик положения, сочлененный с валом электродвигателя, дополнительный нуль-орган, блок задания положения и второй пороговый блок, входы которого подключены соответственно к блоку задания положения и датчику положения, а выход через дополнительный нуль орган связан с логическим распределителем, блок задания момента, сумматор и блок управления ойлоткой возбуждения, входсм подключенный к сумматору, один вход которого соединен с блоком задания момента, а второй - с первым пороговым блоком, вхо ды каждой пары нуль-органов напряжения попарно объединены и подключены к силовым электродам соответствующих тиристоров преобразователя. Источники информации, принятые во внимание прч экспертизе 1.Авторское свидетельство СССР № 489189, кл. Н 02 Р 5/06, 1974. 2.Авторское свидетельство СССР по заявке № 275634О, кэт. Н 02 Р 5/06, . wФч Гм И ПП ч f 5 М Н JY JK 

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1980 |
|
SU904168A1 |
| Реверсивный электропривод постоянного тока | 1988 |
|
SU1557662A1 |
| Реверсивный электропривод постоянного тока | 1980 |
|
SU930548A1 |
| Реверсивный электропривод | 1991 |
|
SU1791951A1 |
| Реверсивный электропривод постоянного тока | 1989 |
|
SU1598094A1 |
| Устройство для управления электродвигателем постоянного тока | 1982 |
|
SU1080241A1 |
| Электропривод постоянного тока | 1979 |
|
SU811471A1 |
| Электропривод транспортного средства | 1986 |
|
SU1359171A1 |
| Электропривод постоянного тока с оптимальным управлением | 1986 |
|
SU1471274A1 |
| Устройство для определения углового положения ротора вентильного двигателя | 1981 |
|
SU1003261A1 |