Изобретение относится к системам управления угловым движением подвижного объекта.
Целью изобретения является повышение помехозащищенности системы.
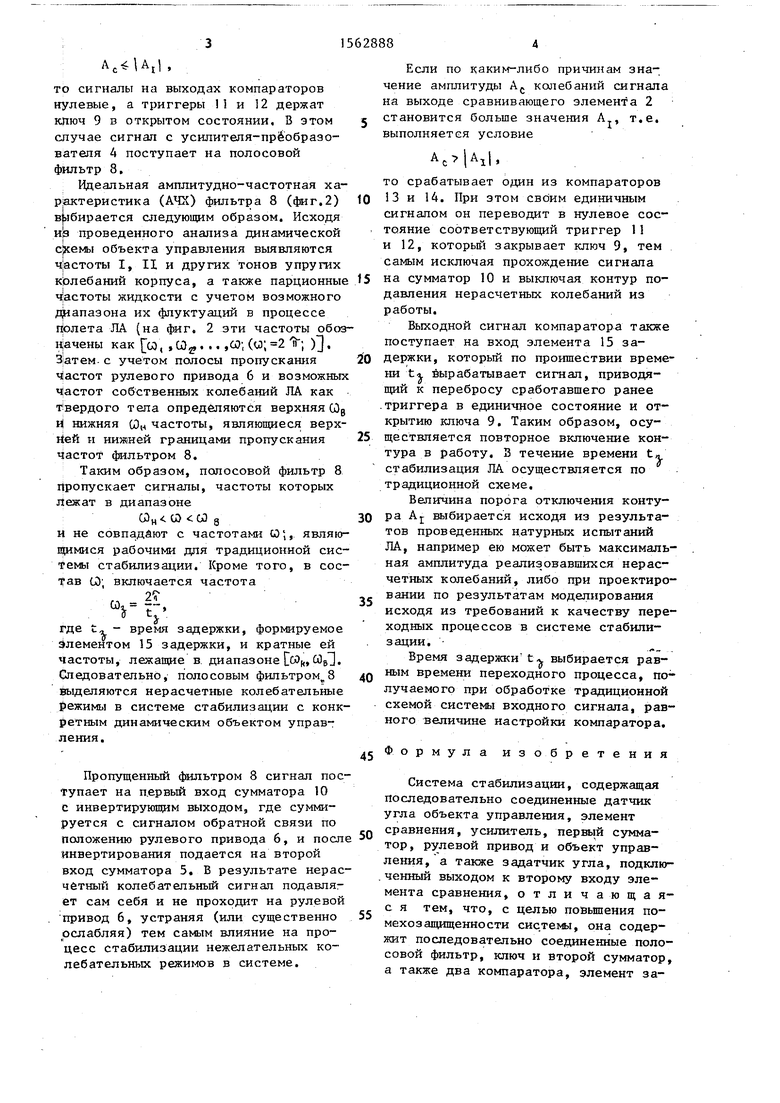
На фиг. 1 представлена схема системы стабилизации; на фиг. 2 - идеальная амплитудно-частотная характеристика полосового фильтра.
Система содержит датчик 1 угла объекта управления, элемент 2 сравнения, задатчик 3 угла, усилитель 4, сумматор 5, рулевой привод 6, объект 7 управления, полосовой фильтр 8, ключ 9, сумматор 10, триггеры 11 и 12, компараторы 13 и 14, элемент 15 задержки.
Система стабилизации работает следующим образом.
При возникновении колебаний в системе (расчетных и нерасчетных) они фиксируются датчиком 1 угла, являющимся чувствительным элементом системы, сигнал с которого поступает на вход элемента 2 сравнения, где сравнивается с программным значением, формируемым задатчиком 3 угла. На выходе сравнивающего элемента формируется сигнал ошибки, поступающий на вход усилителя 4 и входы компараторов 13 и 14, Пороги срабатывания компараторов выбраны равными соответственно At и Aj, где AJ- - определенная заранее заданная величина входного сигнала. Если значение амплитуды Ас колебаний сигнала на выходе элемента 2 не превышает значение lA , т.е. выполняется неравенство
,
то сигналы на выходах компараторов нулевые, а триггеры 11 и 12 держат ключ 9 в открытом состоянии. В этом случае сигнал с усилителя-преобразователя 4 поступает на полосовой фильтр 8.
Идеальная амплитудно-частотная ха- р-актеристика (АЧХ) фильтра 8 (фиг.2) выбирается следующим образом. Исходя иэ проведенного анализа динамической объекта управления выявляются частоты I, II и других тонов упругих колебаний корпуса, а также парционные Частоты жидкости с учетом возможного диапазона их флуктуации в процессе полета ЛА (на фиг. 2 эти частоты обозначены как со, , а}г . .. ,0); (о; 2 if; ). Затем с учетом полосы пропускания частот рулевого привода 6 и возможных Частот собственных колебаний ЛА как твердого тела определяются верхняя (Ов и; нижняя С0,ч частоты, являющиеся верхней и нижней границами пропускания частот фильтром 8.
Таким образом, полосовой фильтр 8 пропускает сигналы, частоты которых лежат в диапазоне
СО 8
И не совпадают с частотами СО;, являющимися рабочими для традиционной системы стабилизации. Кроме того, в состав Q включается частота 2
где
%- Г Ч
- - время задержки, формируемое Элементом 15 задержки, и кратные ей частоты, лежащие в диапазоне W|, СОВ. Следовательно, полосовым фильтром„8 выделяются нерасчетные колебательные режимы в системе стабилизации с конкретным динамическим объектом управления.
Пропущенный фильтром 8 сигнал поступает на первый вход сумматора 10 С инвертирующим выходом, где суммируется с сигналом обратной связи по положению рулевого привода 6, и после инвертирования подается на второй вход сумматора 5. В результате нерасчетный колебательный сигнал подавляет сам себя и не проходит на рулевой привод 6, устраняя (или существенно ослабляя) тем самым влияние на процесс стабилизации нежелательных колебательных режимов в системе.
Если по каким-либо причинам значение амплитуды Ас колебаний сигнала на выходе сравнивающего элемента 2 становится больше значения выполняется условие
А,
т.е.
Ас
41
то срабатывает один из компараторов
13 и 14. При этом своим единичным сигналом он переводит в нулевое состояние соответствующий триггер 11 и 12, который закрывает ключ 9, тем самым исключая прохождение сигнала
на сумматор 10 и выключая контур подавления нерасчетных колебаний из работы.
Выходной сигнал компаратора также поступает на вход элемента 15 задержки, который по проишествии времени tt вырабатывает сигнал, приводящий к перебросу сработавшего ранее триггера в единичное состояние и открытию ключа 9. Таким образом, осуществляется повторное включение контура в работу. В течение времени t стабилизация ЛА осуществляется по традиционной схеме.
Величина порога отключения контуРа АГ выбирается исходя из результатов проведенных натурных испытаний ЛА, например ею может быть максимальная амплитуда реализовавшихся нерасчетных колебаний, либо при проектировании по результатам моделирования исходя из требований к качеству переходных процессов в системе стабилизации.
Время задержки t выбирается равным времени переходного процесса, получаемого при обработке традиционной схемой системы входного сигнала, равного величине настройки компаратора.
Формула изобретения
Система стабилизации, содержащая последовательно соединенные датчик угла объекта управления, элемент сравнения, усилитель, первый сумматор, рулевой привод и объект управления, а также задатчик угла, подключенный выходом к второму входу элемента сравнения, отличающая- с я тем, что, с целью повышения помехозащищенности системы, она содержит последовательно соединенные полосовой фильтр, ключ и второй сумматор, а также два компаратора, элемент задержки и два RS-триггера, подключенных выходами к управляющему входу ключа, S-входами - к выходу элемента задержки, К-входами - к входу элемента задержки и к выходам соответствующих компараторов, входы которых соединены с выходом элемента сравнения, причем второй вход второго сумматора связан с выходом рулевого привода, а выход - с вторым входом первого сумматора, выход усилителя подключен к входу полосового фильтра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления скоростью перемещения магнитной ленты | 1983 |
|
SU1137521A1 |
| УСТРОЙСТВО ДЛЯ ДЕМОДУЛЯЦИИ ШУМОПОДОБНОГО СИГНАЛА | 1985 |
|
SU1840005A1 |
| Устройство контроля частоты вращения электрической машины | 1983 |
|
SU1205020A1 |
| Устройство для контроля работоспособности станка | 1990 |
|
SU1776491A1 |
| АДАПТИВНЫЙ ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 1990 |
|
RU2012013C1 |
| Устройство контроля параметров | 1983 |
|
SU1164667A1 |
| РАДИОЛУЧЕВОЙ ДАТЧИК ОХРАНЫ | 1992 |
|
RU2079889C1 |
| Устройство для контроля степени уплотнения композиционных смесей | 1990 |
|
SU1749898A1 |
| Оптоэлектронное устройство для измерения линейных перемещений объекта | 2024 |
|
RU2824329C1 |
| Система экстремального регулирования амплитуды вибраций на металлорежущем станке с выдвижным шпинделем | 1985 |
|
SU1352453A1 |
Изобретение относится к гидротехническому строительству и может быть использовано для автоматического регулирования уровня воды в бьефах гидросооружений. Целью изобретения является расширение области применения и повышение эксплуатационной надежности. Регулятор уровня содержит водовыпускную трубу прямоугольного сечения с расходным отверстием в нижней стенке трубы, в которой размещен водонаполняемый затвор. Затвор образован гибкой лентой, размещенной на расходном отверстии, и корпусом водовыпускной трубы. Полость водонаполняемого затвора сообщена с верхним бьефом каналом и снабжена сливом, на котором размещен поплавковый клапан. Кроме того, полость водонаполняемого затвора сообщена с верхним бьефом через зазоры между корпусом трубы и гибкой лентой. Система последовательно соединенных затворов производит автоматическую сортировку взвешенных наносов. Крупные наносы меньших размеров сбрасываются в нижний бьеф. По сливу поступают как бы отфильтрованные взвешенные наносы, не являющиеся препятствием наиболее чувствительному элементу - клапану, не вызывая его заклинивания. 1 з.п. ф-лы, 1 ил.
| Панель покрытия | 1981 |
|
SU996669A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Айзенберг Я.Е., Сухоребрый В.Г | |||
| Проектирование систем стабилизации носителей космических аппаратов | |||
| - М | |||
| : Машиностроение, 1986, с | |||
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
