Изобретение относится .к области сельскохозяйственного машиностроения, в частности к устройствам для загрузки минеральных удобрений в зерновые сеялки.
Цель изобретения - повышение надежности и безопасности в работе.
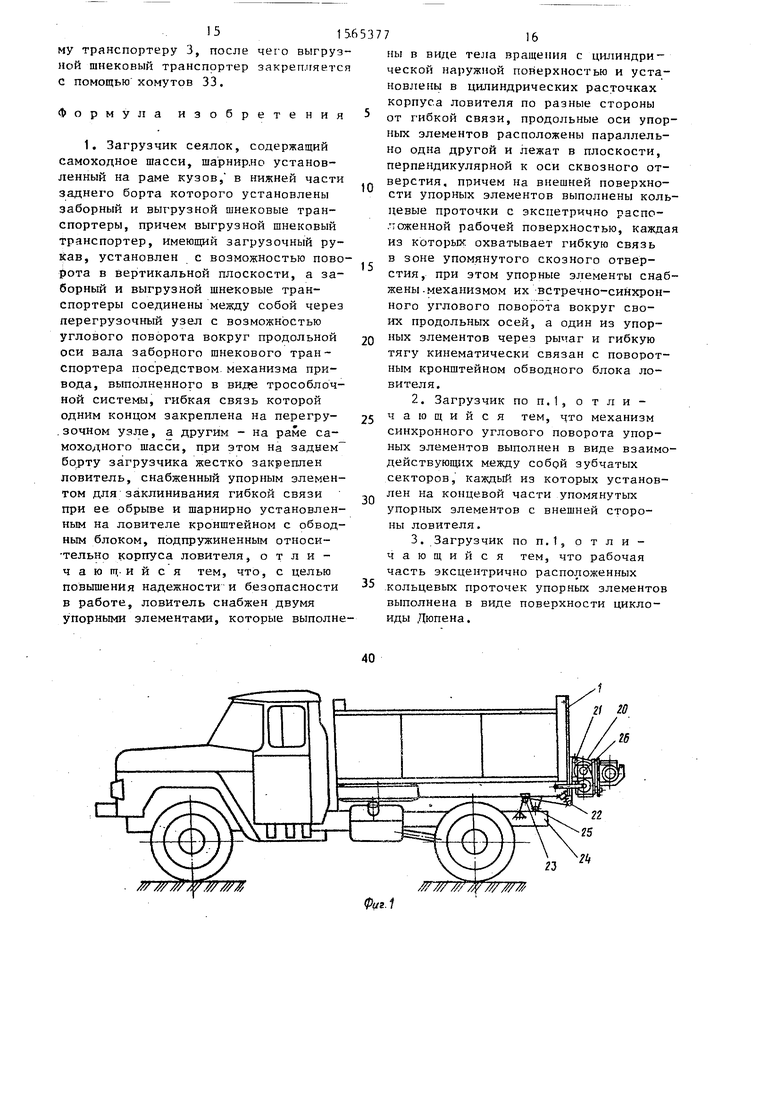
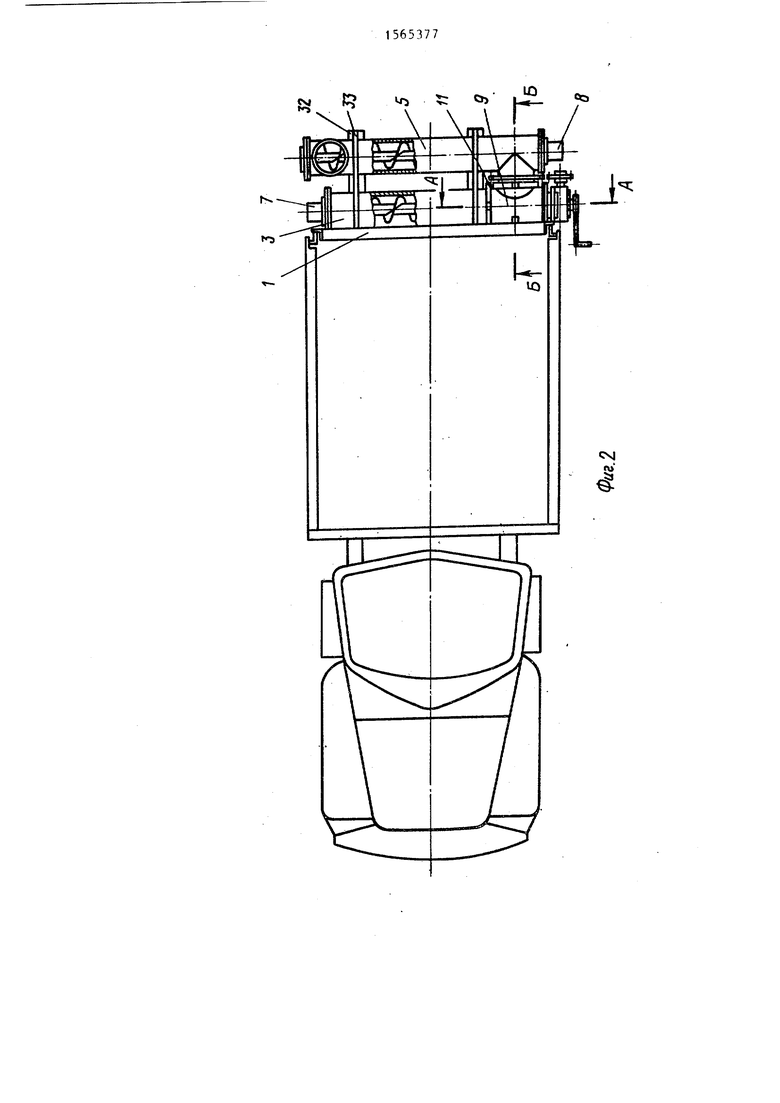
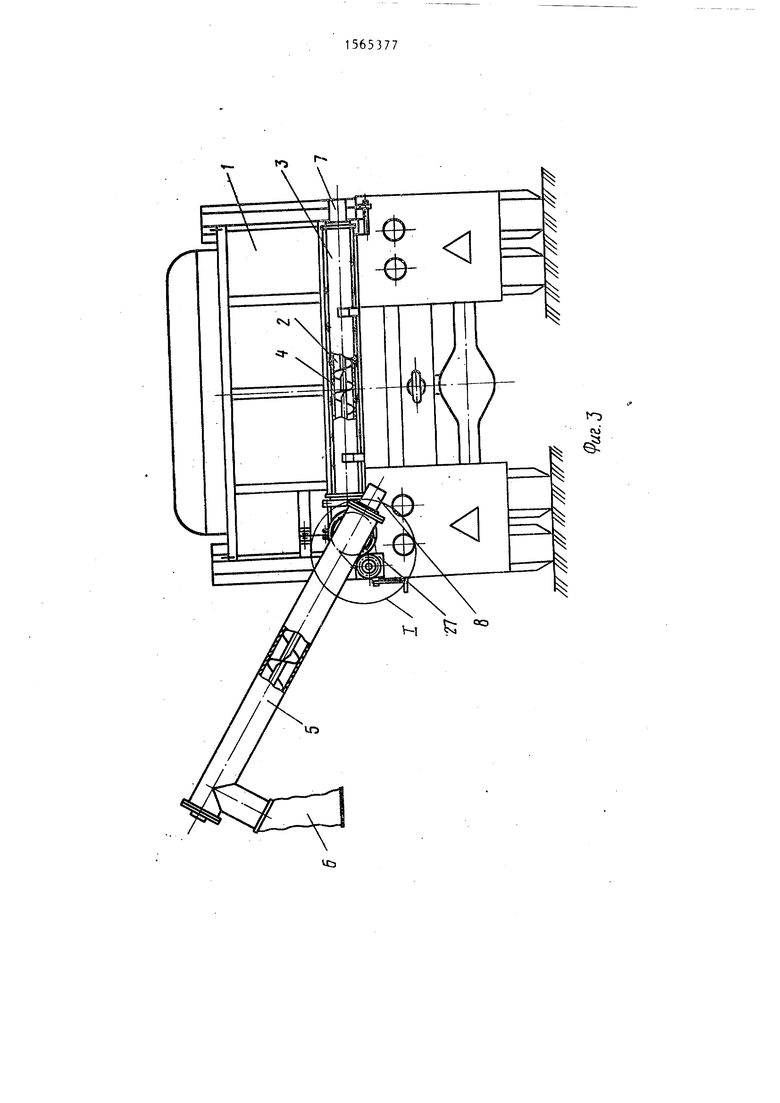
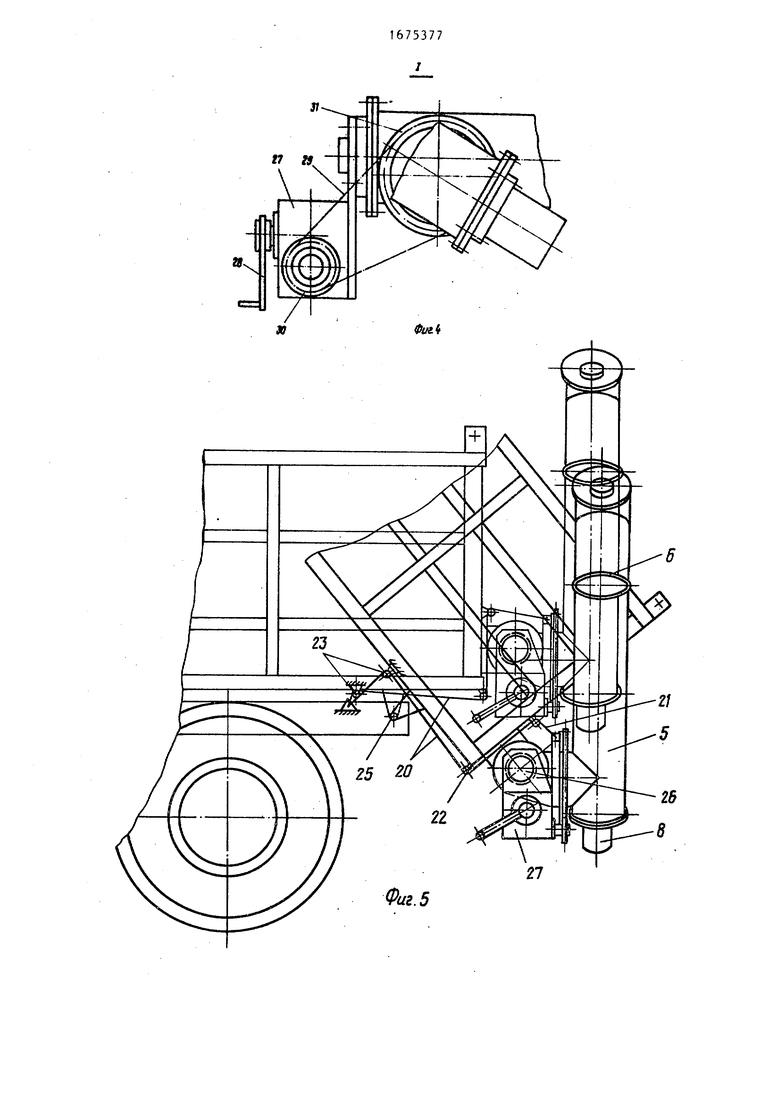
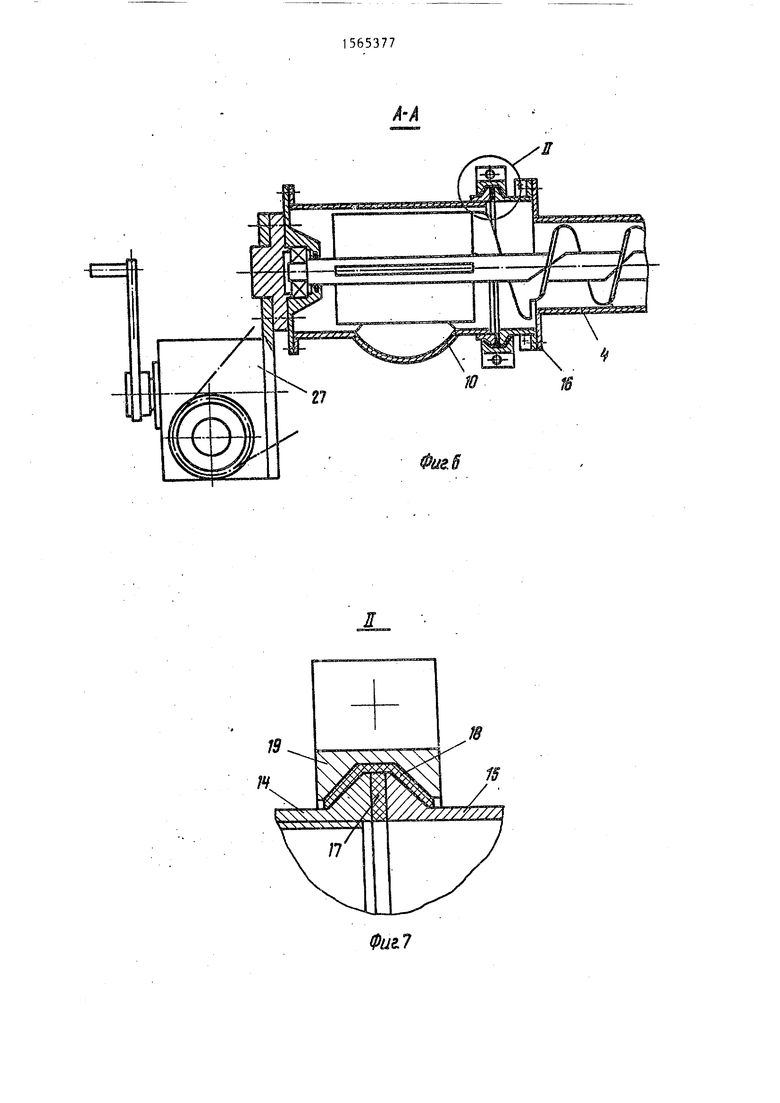
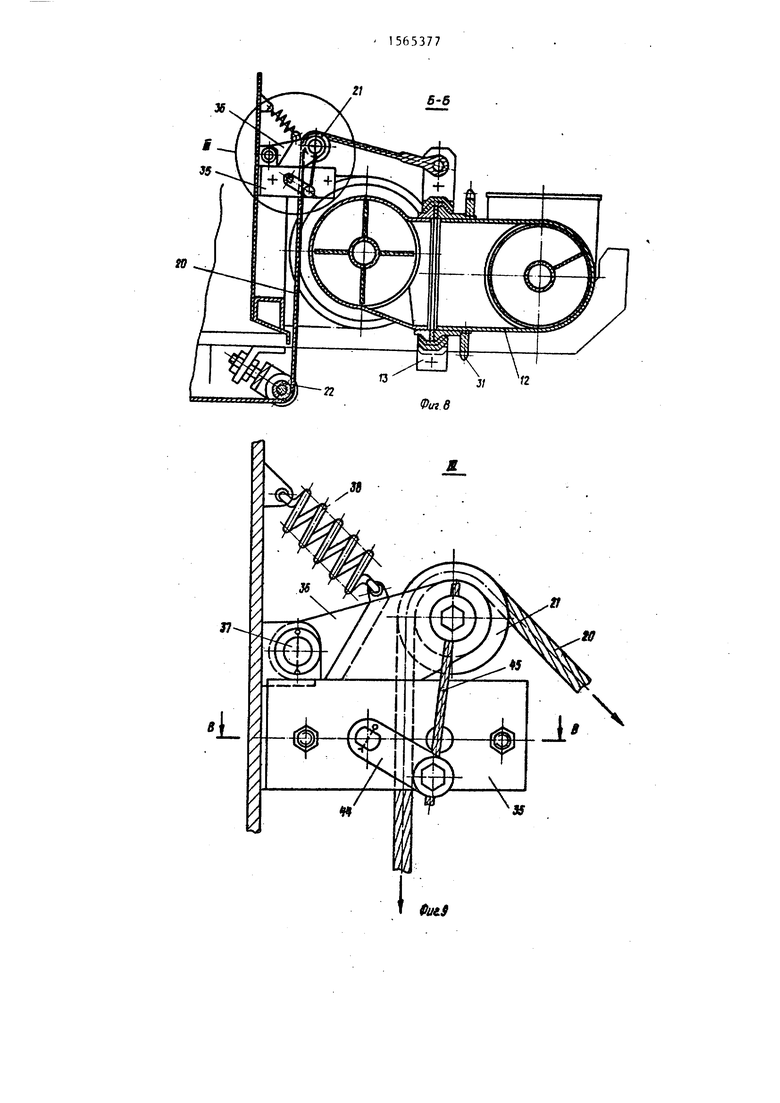
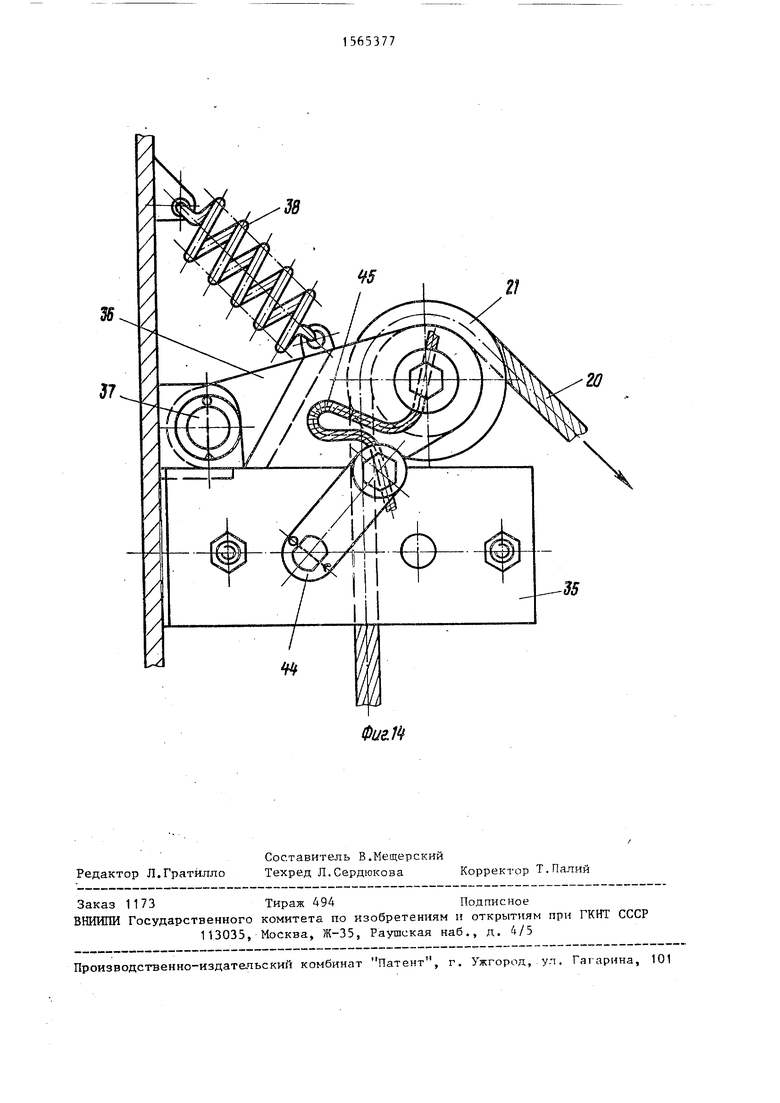
На фиг.1 изображен загрузчик сеялок, выгрузной шнековый транспортер которого расположен в транспортном положении, вид сбоку; на фиг.2 - то же, вид сверху; на фиг.З - вид сзади, выгрузной шнековый конвейер загрузчика сеялок, установленный в ра- бочее положение, вид сзади;на фиг.4 - узел I на фиг.З; на фиг.5 - загрузчик сеялок при подъеме кузова, вид сбоку; на фиг.6 - сечение А-А на фиг.2; на фиг.7 - узел II на фиг.6; на фиг.8 - сечение Б-Б на фиг.2; на фиг.9 - узел III на фиг.8; на фиг.Ю ловитель, продольный разрез;на фиг.11 сечение В-В на фиг.9; на фиг.12 - элементы ловителя в момент фиксации гибкой связи при ее обрыве;на фиг.13 то же, продольный разрез;на фиг.14 - элементы ловителя при удержании гибкой связи после ее фиксации.
Загрузчик сеялок содержит кузов с задним борҐом 1, снабженный в нижней части продольным выгрузным отверстием 2, заборный шнековый транспортер 3, V-образный кожух 4 которого своей открытой частью совмещен с выгрузным отверстием заднего борта, и выгрузной шнековый транспортер 5, выгрузное окно которого снабжено разгрузочным рукавом 6.
$ 0 5
5
Привод заборного и выгрузного шне- ковых транспортеров осуществляется от гидромоторов 7 и 8, включенных в гидросистему загрузчика сеялок.
Заборный шнековый транспортер 3 снабжен перегрузочным узлом 9. Корпус 10 перегрузочного узла выполнен закрытым в виде улитки и соединен с V-образным кожухом 4 заборного шнекового транспортера посредством шарнира 11. Выгрузной шнековый транспортер 5 крепится к корпусу перегрузочного узла заборного шнекового транспортера через переходной патрубок 12 посредством шарнира 13 с возможностью поворота в вертикальной плоскости. Шарнир 11 поворота корпуса перегрузочного узла выполнен в виде двух кольцевых опорных элементов 14 и 15, один из которых закреплен на переходном фланце 16 V-об- разного кожуха 4 заборного шнекового транспортера, а другой - на корпусе перегрузочного узла, при этом опорные кольцевые элементы с вкладышами 17 и 18, выполненные из антифрикционного материала, охватываются наружным разъемным кольцом 19.
Перегрузочный узел 9 с установленным на нем выгрузным шнековым транспортером 5 соединен с V-образным кожухом заборного шнека с возможностью углового поворота в шарнирном соединении 11 вокруг продольной оси вала заборного шнекового транспортера 3 посредством механизма привода.
Механизм привода выполнен в виде трособлочной системы, гибкая связь
515
20 которой переброшена через ряд обводных блоков 21-23. Один конец гибкой связи 20 закреплен на корпусе перегрузочного узла 9, а другой конец гибкой связи - на неподвижной раме 24 транспортного средства со смещением в сторону кабины относительно оси шарнира 25 подъема, кузова на величину, равную расстоянию от места крепления конца гибкой связи к корпусу 10 перегрузочного узла 9 до оси 26 его поворота. Обводные блоки 21-23 трособлочной системы расположены на кузове с внешней стороны и вдоль кузова. При этом первый обводной блок 21 установлен на заднем борту 1 загрузчика сеялок выше оси 26 поворота перегрузочного узла 9 заборного шнекового транспортера, а последний обводной блок 23 трособлочной системы установлен на днище кузова над местом закрепления гибкой связи к раме 24 загрузчика сеялок. 06
0
5
Гибкая связь 20 трособлочной системы, огибающая обводной блок 21 зад него борта, пропущена свободно через сквозное отверстие 34 ловителя 35, в котором обеспечивается фиксация отрезка гибкой связи при ее аварийном обрыве. При этом ловитель 35 жестко закреплен на заднем борту кузова загрузчика сеялок, а кронштейн 36 с обводным блоком 21 установлен на ловителе шарнирно посредством горизонтально расположенной оси 37 и подпружинен относительно корпуса ловителя посредством силовой пружины 38 растяжения, один конец которой закреплен на кронштейне 36, а другой - на заднем борту кузова.
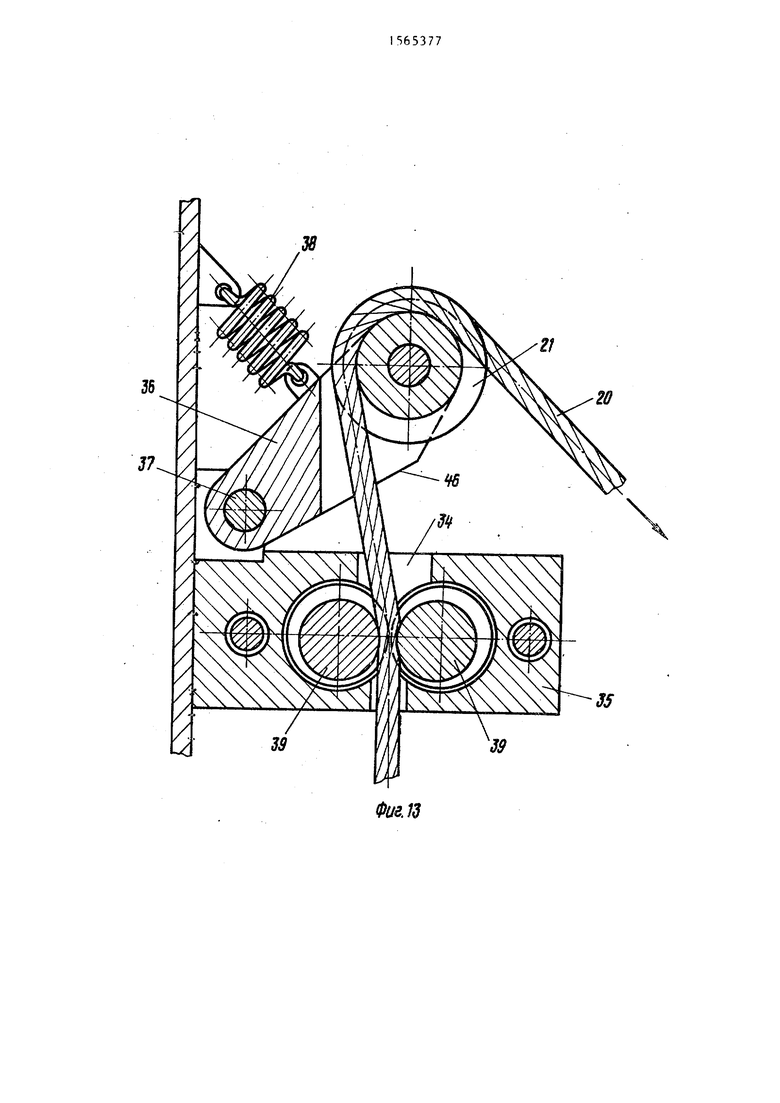
Для фиксации гибкой связи трособлочной системы в отверстии 34 ловителя последний снабжен двумя упорны ми элементами 39 заклинивания, каждый из которых выполнен в виде тела вращения с цилиндрической наружной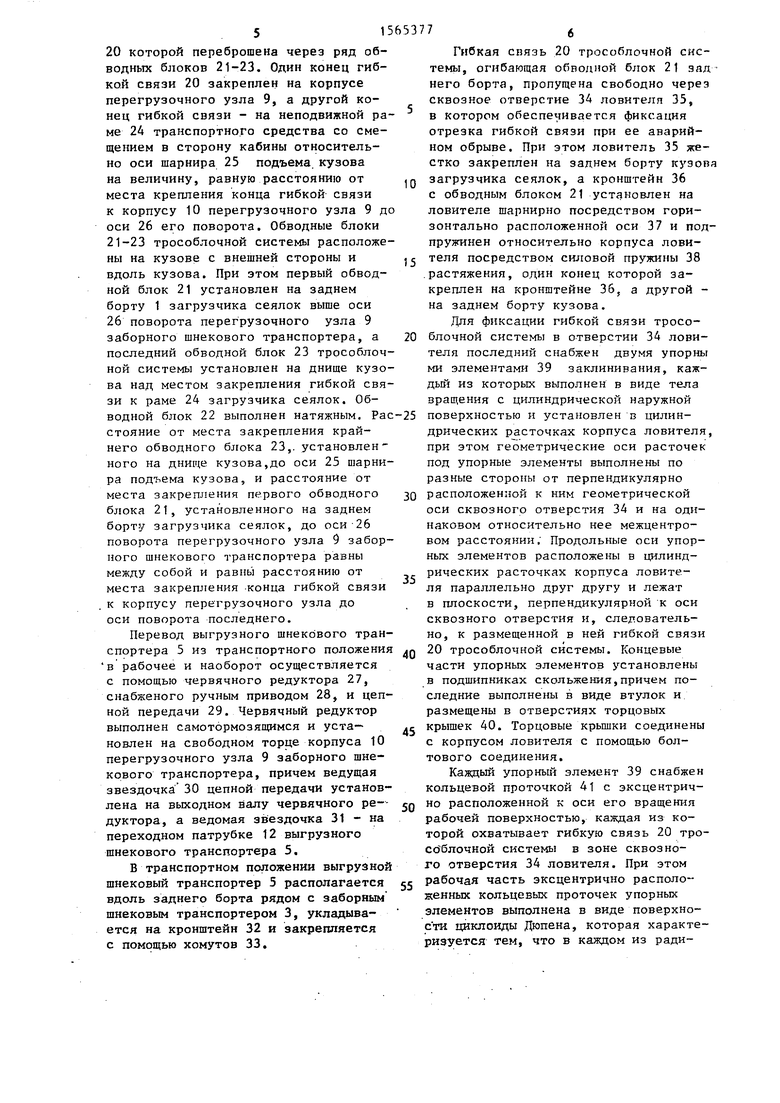
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузчик сеялок | 1985 |
|
SU1296027A1 |
| Загрузчик сеялок | 1989 |
|
SU1628894A1 |
| ЗАГРУЗЧИК СЕМЯН В СЕЯЛКИ | 2005 |
|
RU2283567C1 |
| ЗАГРУЗЧИК СЕЯЛОК | 2016 |
|
RU2636979C1 |
| ЗАГРУЗЧИК СЕЯЛОК | 2014 |
|
RU2551785C1 |
| Загрузчик сеялок | 2021 |
|
RU2773666C1 |
| Загрузчик сеялок | 1986 |
|
SU1454291A2 |
| САМОРАЗГРУЖАЮЩЕЕСЯ САМОХОДНОЕ ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЕ СРЕДСТВО НА ГУСЕНИЧНОМ ХОДУ | 2007 |
|
RU2335881C1 |
| Приспособление к автосамосвалу для загрузки сельскохозяйственных машин | 1988 |
|
SU1586936A2 |
| Приспособление к автосамосвалу для загрузки сельскохозяйственных машин | 1988 |
|
SU1519551A1 |

Изобретение относится к сельскохозяйственному машиностроению. Цель изобретения - повышение надежности и безопасности в работе. Загрузчик содержит самоходное шасси с расположенной на нем рамой с кузовом, в нижней части заднего борта которого установлены заборный и выгрузной транспортеры, причем выгрузной транспортер установлен с возможностью поворота в вертикальной плоскости с помощью гибкой связи 20, при этом на заднем борту загрузчика закреплен ловитель 35, снабженный упорным элементов 39 для заклинивания гибкой связи 20 при ее обрыве и кронштейном 36 с осью 37, на котором установлен подпружиненный обводной пружиной 38, блок 21, а ловитель 35 снабжен двумя опорными элементами 39 с кольцевыми проточками с эксцентрично расположенной рабочей поверхностью, установленными по разные стороны от гибкой связи 20, при этом упорные элементы 39 имеют механизм синхронного углового поворота в виде зубчатых секторов. Работает загрузчик следующим образом. Подъехав к сеялке, водитель переводит выгрузной транспортер в рабочее положение и с помощью привода располагает его над бункером. В случае аварийного обрыва гибкой связи 20 при подъеме кузова, силовое воздействие на блок 21 прекращается, пружина 38 через кронштейн 36 поворачивает механизм синхронного углового поворота, а через него поворачивает упорные элементы 39 навстречу друг другу, при этом рабочие поверхности проточек упорных элементов сближаются и зажимают гибкую связь 20, чем и обеспечивается надежная фиксация отрезка гибкой связи 20 в ловителе и предотвращается падение выгрузного транспортера. 2 з.п. ф-лы, 14 ил.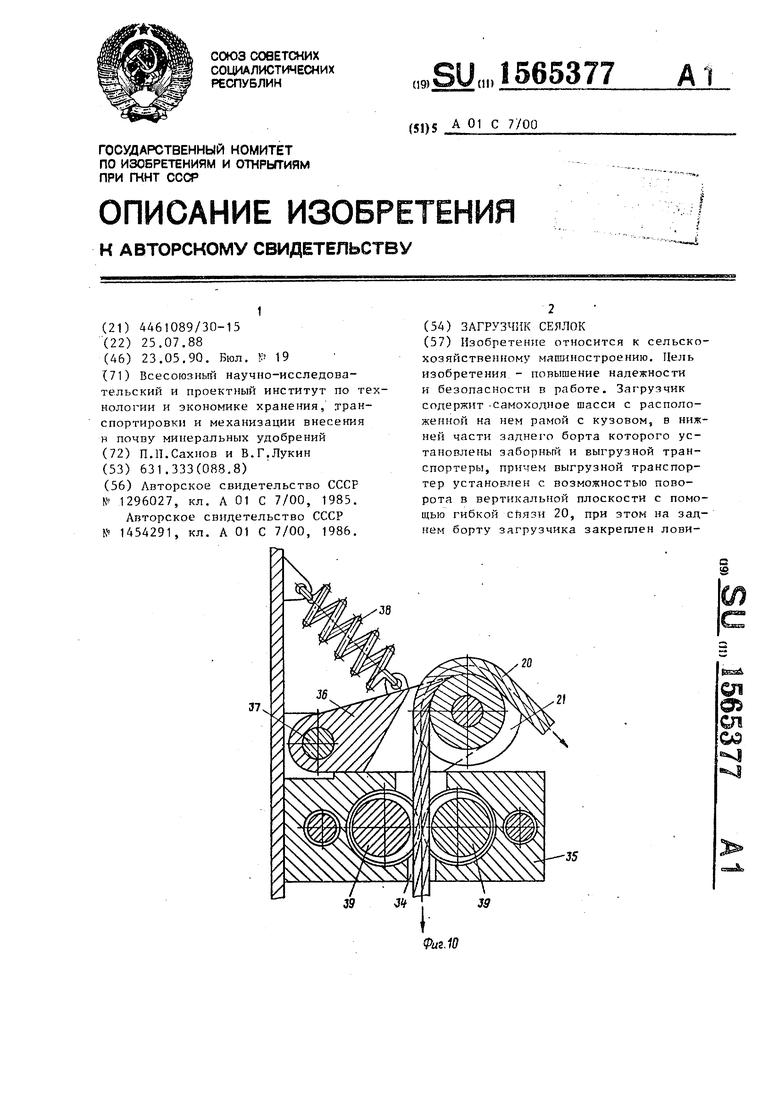
водной блок 22 выполнен натяжным. Рас-25 поверхностью и установлен в цилинстояние от места закрепления крайнего обводного блока 23, установленного на днище кузова,до оси 25 шарнира подъема кузова, и расстояние от места закрепления первого обводного блока 21, установленного на заднем борту загрузчика сеялок, до оси 26 поворота перегрузочного узла 9 заборного шнекового транспортера равны между собой и равны расстоянию от места закрепления конца гибкой связи к корпусу перегрузочного узла до оси поворота последнего.
Перевод выгрузного шнекового транспортера 5 из транспортного положения в рабочее и наоборот осуществляется с помощью червячного редуктора 27, снабженого ручным приводом 28, и цепной передачи 29. Червячный редуктор выполнен самотормозящимся и установлен на свободном торце корпуса 10 перегрузочного узла 9 заборного шнекового транспортера, причем ведущая звездочка 30 цепной передачи установлена на выходном валу червячного ре-- дуктора, а ведомая звездочка 31 - на переходном патрубке 12 выгрузного шнекового транспортера 5.
В транспортном положении выгрузной шнековый транспортер 5 располагается вдоль заднего борта рядом с заборным шнековым транспортером 3, укладывается на кронштейн 32 и закрепляется с помощью хомутов 33.
0
5
0
дрических расточках корпуса ловителя, при этом геометрические оси расточек под упорные элементы выполнены по разные стороны от перпендикулярно расположенной к ним геометрической оси сквозного отверстия 34 и на одинаковом относительно нее межцентровом расстоянии. Продольные оси упорных элементов расположены в цилиндрических расточках корпуса ловителя параллельно друг другу и лежат в плоскости, перпендикулярной к оси сквозного отверстия и, следовательно, к размещенной в ней гибкой связи 20 трособлочной системы. Концевые части упорных элементов установлены в подшипниках скольжения,причем последние выполнены в виде втулок и размещены в отверстиях торцовых с крышек 40. Торцовые крышки соединены с корпусом ловителя с помощью болтового соединения.
Каждый упорный элемент 39 снабжен кольцевой проточкой 41 с эксцентрично расположенной к оси его вращения рабочей поверхностью, каждая из которой охватывает гибкую связь 20 тро- соЧЗлочной системы в зоне сквозного отверстия 34 ловителя. При этом рабочая часть эксцентрично расположенных кольцевых проточек упорных элементов выполнена в виде поверхности циклоиды Дюпена, которая характеризуется тем, что в каждом из ради0
5
альных сечений упорных элементов линия рабочей поверхности образует половину окружности.
Ловитель снабжен узлом синхронизации углового поворота упорных элементов вокруг своих продольных осей. При этом механизм синхронизации углового поворота упорных элементов навстречу друг другу выполнен в виде взаимодействующих между собой зубчатых секторов 42 и 43, каждый из которых установлен на концевых частях упорных элементов с внешней стороны ловителя. Один из упорных элементов ловителя имеет кинематическую связь через одноплечий рычаг 44 и гибкую тягу 45 с поворотным кронштейном 36 обводного блока ловителя.
Ловитель в верхней своей части содержит также опорную поверхность 46, которая обеспечивает ограничение угла поворота кронштейна 36 с обводным блоком 21 Б вертикальной плоскости на оси 37 шарнирного соединения под действием усилия натяжения гибкой связи трособлочной системы. Регулировка работы ловителя . Гна эксплуатационный режим осуществляется в крайнем нижнем положении кронштейна с обводным блоком. Упорные элементы заклинивания гибкой связи трособлочной системы устанавливаются в цилиндрических расточках корпуса ловителя через узел синхронизации, причем так, что эксцентричные кольцевые проточки 41 располагаются к оси сквозного отверстия 34 и соответственно по отношению друг к другу с линией наибольшего углубления проточек, обеспечивая тем самым гарантированный зазор между рабочими участками кольцевых проточек упорных элементов и гибкой связи трособлочной системы. При этом одноплечий рычаг 44 при фиксированном положении упорных элементов 39 устанавливается под некоторым углом к продольной оси ловителя, а длина гибкой тяги 45, кинематически связывающая упомянутый рычаг 44 и поворотный кронштейн 36 с обводным блоком 21, фиксируется между ними в натянутом состоянии.
Загрузчик сеялок работает следующим образом.
Подъехав к агрегату, водитель располагает загрузчик сеялок соответ
0
5
0
5
0
5
0
5
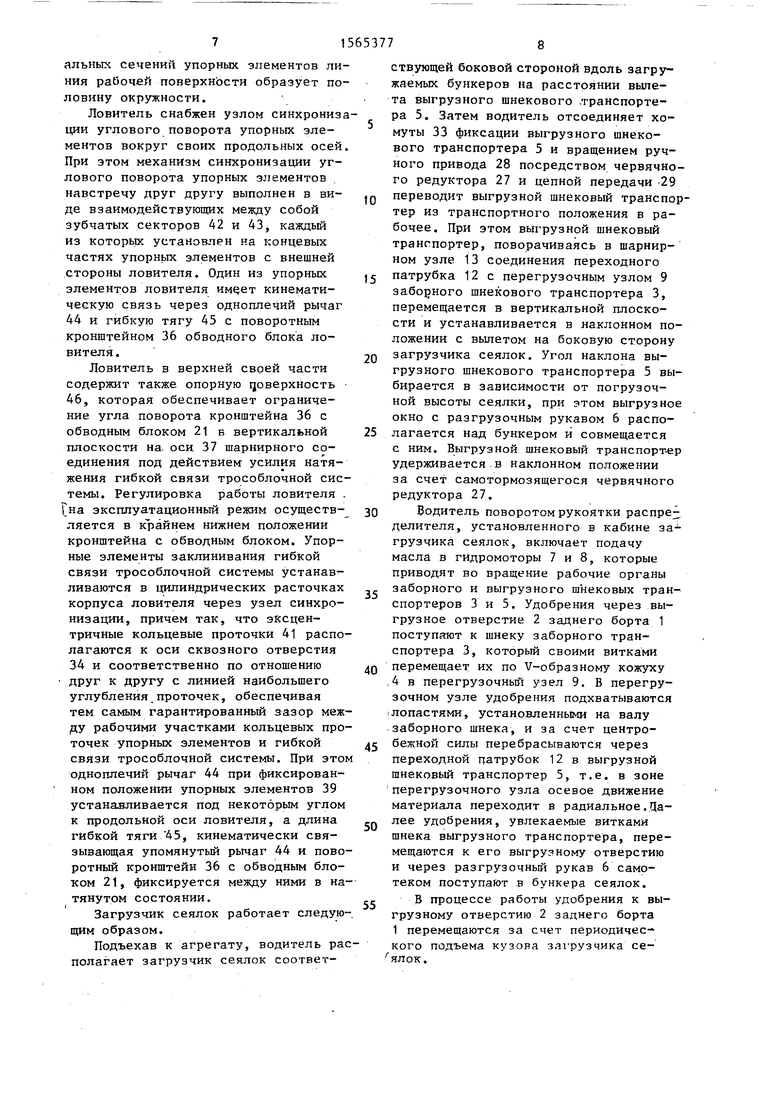
ствующей боковой стороной вдоль загружаемых бункеров на расстоянии вылета выгрузного шнекового транспортера 5. Затем водитель отсоединяет хомуты 33 фиксации выгрузного шнекового транспортера 5 и вращением ручного привода 28 посредством червячного редуктора 27 и цепной передачи 29 переводит выгрузной шнековый транспортер из транспортного положения в рабочее. При этом выгрузной шнековый транспортер, поворачиваясь в шарнирном узле 13 соединения переходного патрубка 12 с перегрузочным узлом 9 заборного шнекового транспортера 3, перемещается в вертикальной плоскости и устанавливается в наклонном положении с выпетом на боковую сторону загрузчика сеялок. Угол наклона выгрузного шнекового транспортера 5 выбирается в зависимости от погрузочной высоты сеялки, при этом выгрузное окно с разгрузочным рукавом 6 располагается над бункером и совмещается с ним. Выгрузной шнековый транспорт-ер удерживается в наклонном положении за счет самотормозящегося червячного редуктора 27.
Водитель поворотом рукоятки распределителя, установленного в кабине зах грузчика сеялок, включает подачу масла в гидромоторы 7 и 8, которые приводят во вращение рабочие органы заборного и выгрузного шнековых транспортеров 3 и 5. Удобрения через выгрузное отверстие 2 заднего борта 1 поступают к шнеку заборного транспортера 3, который своими витками перемещает их по V-образному кожуху ,4 в перегрузочный узел 9. В перегрузочном узле удобрения подхватываются Лопастями, установленными на валу заборного шнека, и за счет центробежной силы перебрасываются через переходной патрубок 12 в выгрузной шнековый транспортер 5, т.е. в зоне 1 перегрузочного узла осевое движение материала переходит в радиальное.Ца- лее удобрения, увлекаемые витками шнека выгрузного транспортера, перемещаются к его выгрузному отверстию и через разгрузочный рукав 6 самотеком поступают в бункера сеялок.
В процессе работы удобрения к выгрузному отверстию 2 заднего борта 1 перемещаются за счет периодического подъема кузова загрузчика се- ялок.
10
15
20
25
9Г)653
При подъеме кузова загрузчика сеялок, установленный в задней его части заборный шнек изменяет свое пространственное положение и опускается вниз, при этом задний борт загруз- 5 чика сеялок наклоняется относительно вертикальной плоскости на угол, равный углу подъема кузова. При подъеме кузова обводной блок 23, установленный на днище кузова, перекатываясь по гибкой связи 20 трособлочной системы, перемещается вверх по дуге
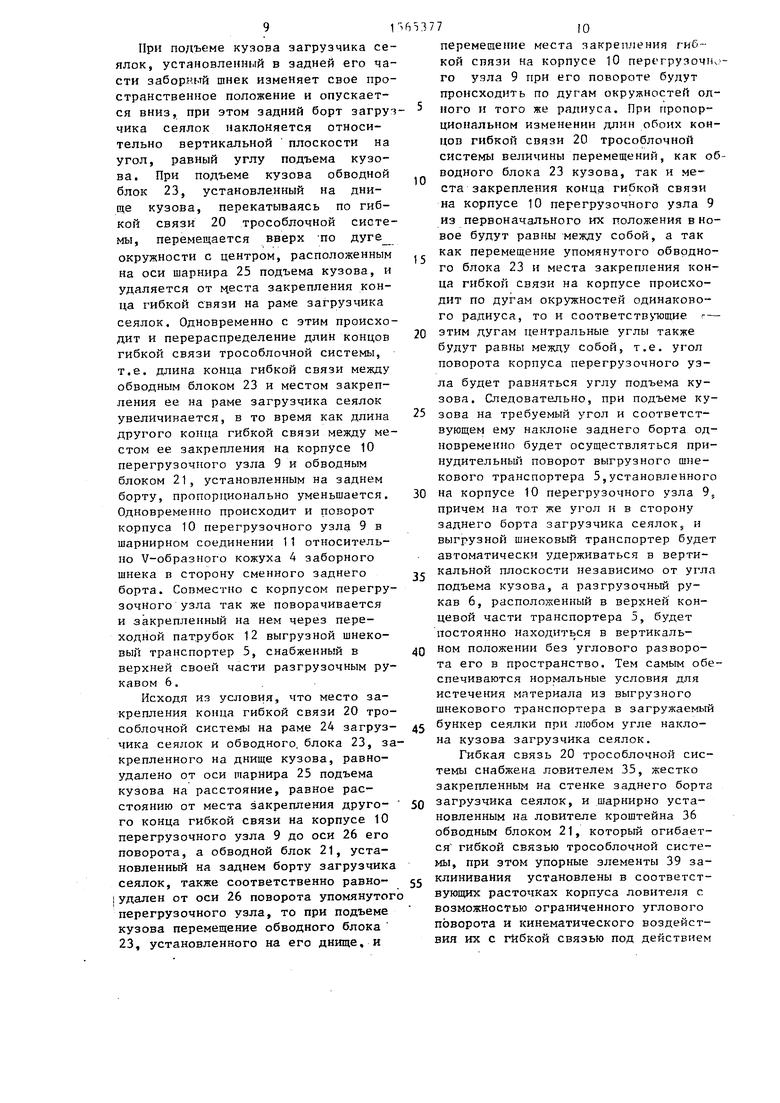
окружности с центром, расположенным на оси шарнира 25 подъема кузова, и удаляется от закрепления конца гибкой связи на раме загрузчика сеялок. Одновременно с этим происходит и перераспределение длин концов гибкой связи трособлочной системы, т.е. длина конца гибкой связи между обводным блоком 23 и местом закрепления ее на раме загрузчика сеялок увеличивается, в то время как длина другого конца гибкой связи между местом ее закрепления на корпусе 10 перегрузочного узла 9 и обводным блоком 21, установленным на заднем борту, пропорционально уменьшается. Одновременно происходит и поворот корпуса 10 перегрузочного узла 9 в шарнирном соединении 11 относительно V-образного кожуха 4 заборного шнека в сторону сменного заднего борта. Совместно с корпусом перегрузочного узла так же поворачивается и закрепленный на нем через переходной патрубок 12 выгрузной шнеко- вый транспортер 5, снабженный в верхней своей части разгрузочным рукавом 6.
Исходя из условия, что место закрепления конца гибкой связи 20 трособлочной системы на раме 24 загрузика сеялок и обводного, блока 23, зарепленного на днище кузова, равноудалено от оси шарнира 25 подъема узова на расстояние, равное растоянию от места закрепления другого конца гибкой связи на корпусе 10 ерегрузочного узла 9 до оси 26 его оворота, а обводной блок 21, устаовленный на заднем борту загрузчика еялок, также соответственно равно- 55 дален от оси 26 поворота упомянутого ерегрузочного узла, то при подъеме узова перемещение обводного блока 3, установленного на его днище, и
30
35
40
45
50
10
15
20
25
53
5
5
30
5
0
5
0
77Ю
перемещение места закрепления гибкой спязи на корпусе 10 перегрузочнч- го узла 9 при его повороте будут происходить по дугам окружностей одного и того же радиуса. При пропорциональном изменении длин обоих концов гибкой связи 20 трособлочной системы величины перемещений, как обводного блока 23 кузова, так и места закрепления конца гибкой связи на корпусе 10 перегрузочного узла 9 из первоначального их положения в новое будут равны между собой, а так как перемещение упомянутого обводного блока 23 и места закрепления конца гибкой связи на корпусе происходит по дугам окружностей одинакового радиуса, то и соответствующие -- этим дугам центральные углы также будут равны между собой, т.е. угол поворота корпуса перегрузочного узла будет равняться углу подъема кузова. Следовательно, при подъеме кузова на требуемый угол и соответствующем ему наклоне заднего борта одновременно будет осуществляться принудительный поворот выгрузного шне- кового транспортера 5,установленного на корпусе 10 перегрузочного узла 9, причем на тот же угол и в сторону заднего борта загрузчика сеялок, и выгрузной шнековый транспортер будет автоматически удерживаться в вертикальной плоскости независимо от угла подъема кузова, а разгрузочный рукав 6, расположенный в верхней концевой части транспортера 5, будет постоянно находиться в вертикальном положении без углового разворота его в пространство. Тем самым обеспечиваются нормальные условия для истечения материала из выгрузного шнекового транспортера в загружаемый бункер сеялки при любом угле наклона кузова загрузчика сеялок.
Гибкая связь 20 трособлочной системы снабжена ловителем 35, жестко закрепленным на стенке заднего борта загрузчика сеялок, и шарнирно установленным на ловителе кроштейна 36 обводным блоком 21, который огибается гибкой связью трособлочной системы, при этом упорные элементы 39 заклинивания установлены в соответствующих расточках корпуса ловителя с возможностью ограниченного углового поворота и кинематического воздействия их с гибкой связью под действием
силовой пружины 38 при снятии нагрузки с обводного блока 21.
Принцип работы ловителя заключается в следующем.
i
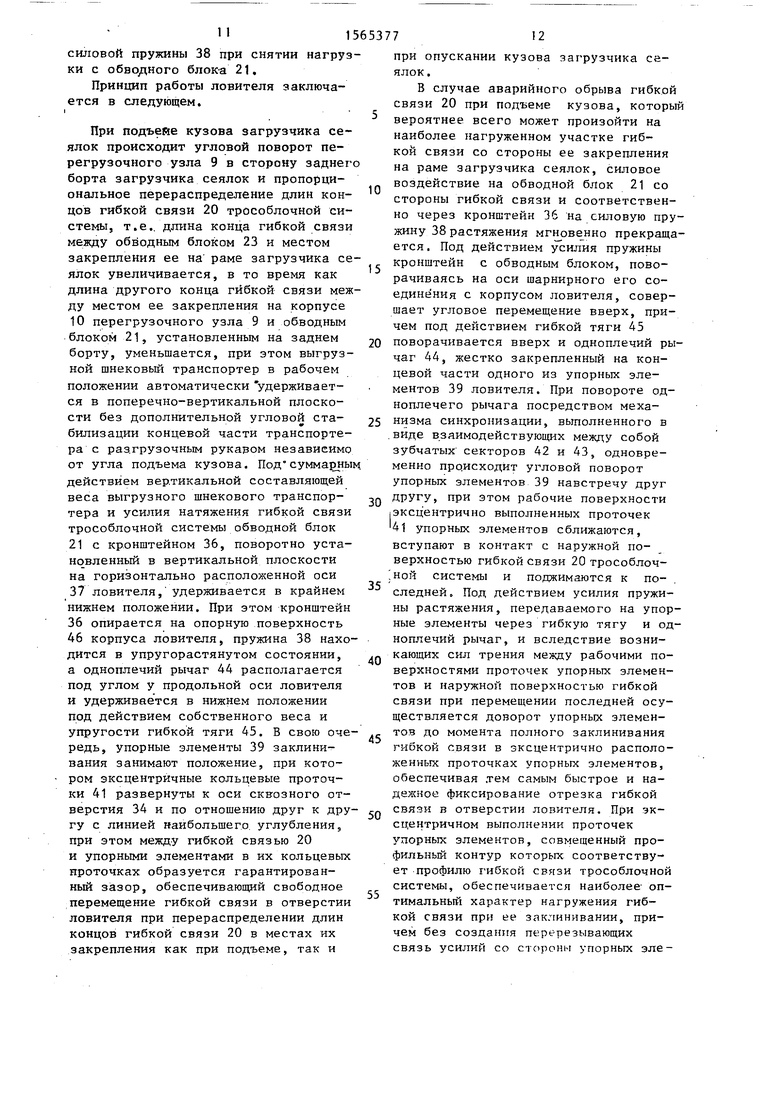
При подъейе кузова загрузчика сеялок происходит угловой поворот перегрузочного узла 9 в сторону заднег борта загрузчика сеялок и пропорциональное перераспределение длин концов гибкой связи 20 трособлочной системы, т.е. длина конца гибкой связи между обводным блоком 23 и местом закрепления ее на раме загрузчика сеялок увеличивается, в то время как длина другого конца гибкой связи между местом ее закрепления на корпусе 10 перегрузочного узла 9 и обводным блоком 21, установленным на заднем борту, уменьшается, при этом выгрузной шнековый транспортер в рабочем положении автоматически удерживается в поперечно-вертикальной плоскости без дополнительной угловой стабилизации концевой части транспортера с разгрузочным рукаэом независимо от угла подъема кузова. Под cyMMapjibi действием вертикальной составляющей веса выгрузного шнекового транспортера и усилия натяжения гибкой связи трособлочной системы обводной блок 21 с кронштейном 36, поворотно установленный в вертикальной плоскости на горизонтально расположенной оси 37 ловителя, удерживается в крайнем нижнем положении. При этом кронштейн 36 опирается на опорную поверхность 46 корпуса ловителя, пружина 38 находится в упругорастянутом состоянии, а одноплечий рычаг 44 располагается под углом у продольной оси ловителя и удерживается в нижнем положении под действием собственного веса и упругости гибкой тяги 45. В свою очередь, упорные элементы 39 заклинивания занимают положение, при котором эксцентричные кольцевые проточки 41 развернуты к оси сквозного отверстия 34 и по отношению друг к другу с линией наибольшего углубления, при этом между гибкой связью 20 и упорными элементами в их кольцевых проточках образуется гарантированный зазор, обеспечивающий свободное перемещение гибкой связи в отверстии ловителя при перераспределении длин концов гибкой связи 20 в местах их закрепления как при подъеме, так и
5
0
5
0
5
0
5
0
5
при опускании кузова загрузчика сеялок.
В случае аварийного обрыва гибкой связи 20 при подъеме кузова, который вероятнее всего может произойти на наиболее нагруженном участке гибкой связи со стороны ее закрепления на раме загрузчика сеялок, силовое воздействие на обводной блок 21 со стороны гибкой связи и соответственно через кронштейн 36 на силовую пружину 38 растяжения мгновенно прекращается. Под действием усилия пружины кронштейн с обводным блоком, поворачиваясь на оси шарнирного его соединения с корпусом ловителя, совершает угловое перемещение вверх, причем под действием гибкой тяги 45 поворачивается вверх и одноплечий рычаг 44, жестко закрепленный на концевой части одного из упорных элементов 39 ловителя. При повороте одноплечего рычага посредством механизма синхронизации, выполненного в виде взаимодействующих между собой зубчатых секторов 42 и 43, одновременно происходит угловой поворот упорных элементов 39 навстречу друг другу, при этом рабочие поверхности эксцентрично выполненных проточек 41 упорных элементов сближаются, вступают в контакт с наружной поверхностью гибкой связи 20 трособлоч- ,ной системы и поджимаются к последней. Под действием усилия пружины растяжения, передаваемого на упорные элементы через гибкую тягу и одноплечий рычаг, и вследствие возникающих сил трения между рабочими поверхностями проточек упорных элементов и наружной поверхностью гибкой связи при перемещении последней осуществляется доворот упорных элементов до момента полного заклинивания гибкой связи в эксцентрично расположенных проточках упорных элементов, обеспечивая .тем самым быстрое и надежное фиксирование отрезка гибкой связи в отверстии ловителя. При эксцентричном выполнении проточек упорных элементов, совмещенный профильный контур которых соответствует профилю гибкой связи трособлочной системы, обеспечивается наиболее оптимальный характер нагружения гибкой связи при ее заклинивании, причем без создания перерезывающих связь усилий со стороны упорных эле
ментов, что при наличии эффекта самозаклинивания гибкой связи упорными элементами повышает надежность фиксации отрезка гибкой связи в отверстии ловителя. Тем самым обеспечивается и надежное удержание выгрузного шнекового транспортера в пространстве независимо от угла наклона загрузчика сеялок.
При восстановлении усилия натяжения гибкой связи 20 трособлочной системы, в результате ее фиксации в ловителе, кронштейн 36 с обводным бло- ком 21, преодолевая сопротивление пружины 38 растяжения, совершает угловой поворот по часовой стрелке из верхнего своего положения в нижне до взаимодействия с верхней опорной плоскостью корпуса ловителя. Так как кронштейн с обводным блоком имеет гибкую кинематическую свзяь через одноплечий рычаг 44 с упорными элементами 39, то при фиксированном положении отрезка гибкой связи в ловителе во время углового перемещения кронштейна 36 между ним и одноплечим рычагом 44 тяга изгибается и, следовательно, усилие от натяжения гибкой связи трособлочной системы упорным элементам заклинивания не передается. Тем самым исключается возможность рас- фиксаций гибкой связи в ловителе, причем независимо от усилия натяжения гибкой связи 20, изменения ее диаметра при вытяжке и наружного со- стояния поверхности.
Поскольку при обрыве гибкой связи 20 трособлочной. системы происходит мгновенное стопорекие ее отрезка в отверстии ловителя 34, причем фиксация отрезка происходит на сравнительно малом участке длины переме- щения троса, то выгрузной шнековый транспортер 5 под действием силы тяжести С9бственного веса практически не совершает поворота в шарнирном соединении 11 вокруг горизонталь- ной оси вала заборного шнекового транспортера 3 и, следовательно, в этом случае не совершает углового перемещения в пространстве из вертикального положения в наклонное. Это, в свою очередь, исключает причины i возникновения травмоопасной ситуации со стороны выгрузного шнекового транспортера при обрыве гибкой связи 20
0
«
- 5 0
д 5
5
трособлочноЛ системы и тем самым обеспечиваются безопасные условия ря боты для обслуживающею персонала и улучшаются условия их труда.
Определяющим для гарантированной быстрой и надежной фиксации отрезка гибкой связи 20 трособлочной системы в предлагаемом устройстве является ограничение контактных напряжений со стороны упорных элементов 39 ловителя, причем выполнение рабочих поверхностей заклинивания в виде эксцентричных кольцевых проточек устраняет пережатие и нарушение совместной работы прядей гибкой связи и предохраняет при оптимальном сочетании растягивающих и контактных напряжений гибкую связь от повторного обрыва в момент фиксации в ловителе. Особенно важен этот фактор при действии на гибкую свячь динамических пульсирующих нагрузок, когда в местах зажима связи резко возрастают усилия ее деформации.
В результате выполнения поверхностей эксцентриковых проточек в виде поверхности циклоиды Дюпена их контакт с гибкой связью осуществляется по всему периметру. При этом зев, образованный между двумя эксцентриковыми проточками меняется, чем обеспечивается «адежный зажим гибкой связи независимо от изменения наружного диаметра (например, при вытяжке связи и вследствие ее коррозии, особенно при перегрузке абразивных и химически агрессивных материалов, к которым относятся минеральные удобрения) , который может произойти при длительной эксплуатации загрузчика сеялок.
Таким образом, благодаря указанному выполнению обеспечивается повышение надежности к работе загрузчика сеялок и безопасность работы обслуживающего персонала.
Перевод выгрузного шнекового транспортера 5 загрузчика сеялок из рабочего наклонного положения в транспортное осуществляется посредством вращения рукоятки ручного привода 28 через червячный редуктор 27 и цепную передачу 29,при этом выгрузной шнековый транспортер, поворачиваясь в шарнирном соединении переходного патрубка 12 перегрузочного узла 9, укладывается на кронштейны 32 вдоль заднего борта параллельно заборному шнеково151565377
му транспортеру 3, после чего выгрузной шнековый транспортер закрепляется с помощью хомутов 33.
Формула изобретения 5
0
5
0
5
16
ны в виде тела вращения с цилиндрической наружной поверхностью и установлены в цилиндрических расточках корпуса ловителя по разные стороны от гибкой связи, продольные оси упорных элементов расположены параллельно одна другой и лежат в плоскости, перпендикулярной к оси сквозного отверстия, причем на внешней поверхности упорных элементов выполнены кольцевые проточки с эксцетрично расположенной рабочей поверхностью, каждая из которых охватывает гибкую связь в зоне упомянутого скозного отверстия, при этом упорные элементы снабжены механизмом их встречно-синхронного углового поворота вокруг своих продольных осей, а один из упорных элементов через рычаг и гибкую тягу кинематически связан с поворотным кронштейном обводного блока ловителя.
5
5
Ф«г1
S3 С ч 5: сь - ю
NL .
ю
ж
10
NJ
I
to
/
Фиг
r г-. гл
ш
чС
ш
«
5
40
It
го
35
36
J7,
Я
20
35
21
W
Фи&М
| Загрузчик сеялок | 1985 |
|
SU1296027A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Загрузчик сеялок | 1986 |
|
SU1454291A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
