выходного сигнала измерителя 1 и величиной приложенного крутящего момента в функции угла I/ поворота вала как
где га - масса отрезка нити 6 длиной fTD, g - ускорение свободного падения, 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНО-ТЕОРЕТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ФРИКЦИОННЫХ ХАРАКТЕРИСТИК ПАРЫ ТРЕНИЯ ДЛЯ ПЕРЕДАЧИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2411496C2 |
| Нагружатель для испытания приводов | 1990 |
|
SU1747982A1 |
| Устройство для динамометрических исследований электродвигателей | 1986 |
|
SU1543260A1 |
| Моментомер | 1987 |
|
SU1727006A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕХАНИЧЕСКИХ ПЕРЕДАЧ | 1992 |
|
RU2037800C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ПРИВОДНЫХ РЕМНЕЙ НА ПРОЧНОСТЬ | 2014 |
|
RU2571196C1 |
| Способ градуировки многокомпонентных датчиков сил и моментов и устройство его реализующее | 2017 |
|
RU2637721C1 |
| Устройство для намотки нити | 1988 |
|
SU1560456A1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ЗАПАДНОГО ДРЕЙФА ТВЕРДОГО ЯДРА ПЛАНЕТЫ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2251662C2 |
| Способ градуировки моментомера и устройство для его реализации | 1981 |
|
SU1006946A1 |
Изобретение относится к силоизмерительной технике и может быть использовано для градуировки измерителей крутящего момента. Целью изобретения является повышение точности. К валу измерителя 12 крутящего момента с помощью муфты 11 подсоединяют нагрузочный узел 2 со шкивом 5 заданного диаметра D. С помощью приводного двигателя 15, входящего в состав измерителя 12, проворачивают вал измерителя на один оборот и регистрируют величину сигнала QX датчика 13 силы, являющегося выходным сигналом измерителя в функции угла φ поворота вала, а затем к шкиву 5 с помощью нити 6 подвешивают набор 8 грузов 9 заданной массы M0 и вновь проворачивают вал измерителя 12 на один оборот и регистрируют величину сигнала QP датчика 13 силы в функции угла поворота вала, после чего устанавливают коэффициент K соответствия между величиной выходного сигнала измерителя 12 и величиной приложенного крутящего момента в функции угла φ поворота вала как K=2.(QP-QX)/(Mд-M).G.D, где M - масса отрезка нити 6 длиной γD, G - ускорение свободного падения. 4 ил.
Изобретение относится к силоизмери- тельной технике и может быть использовано для градуировки измерителей крутящего момента.
Целью изобретения является повыше- ние точности.
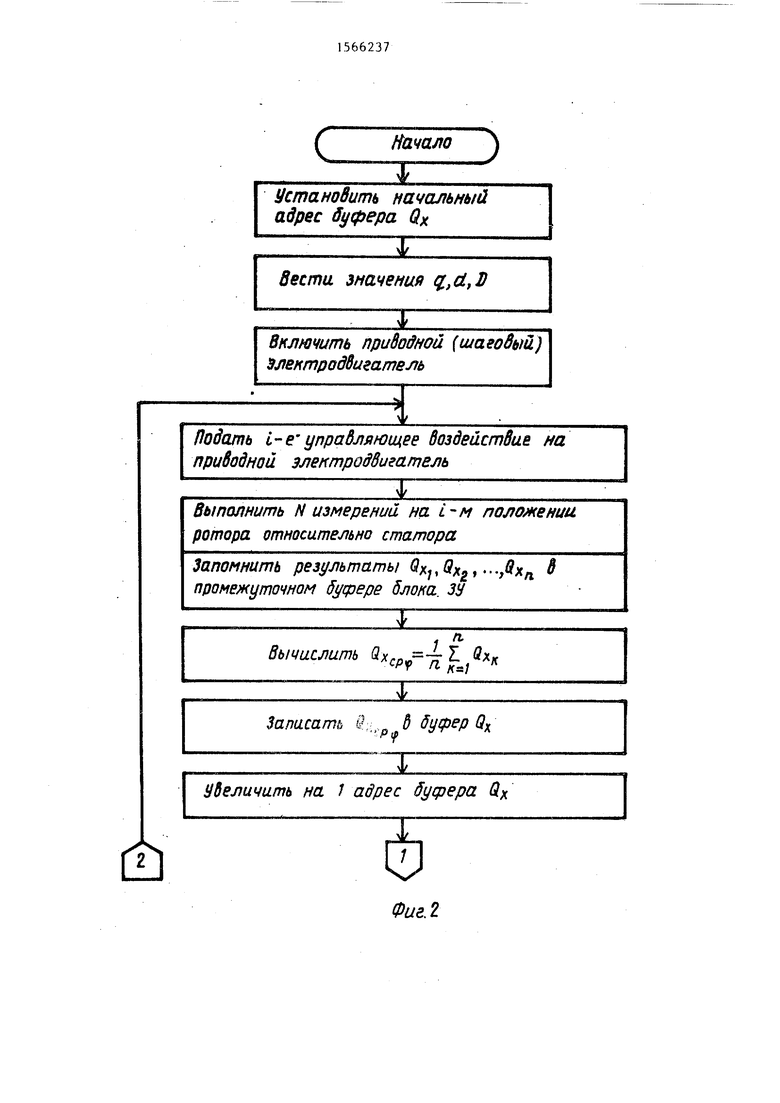
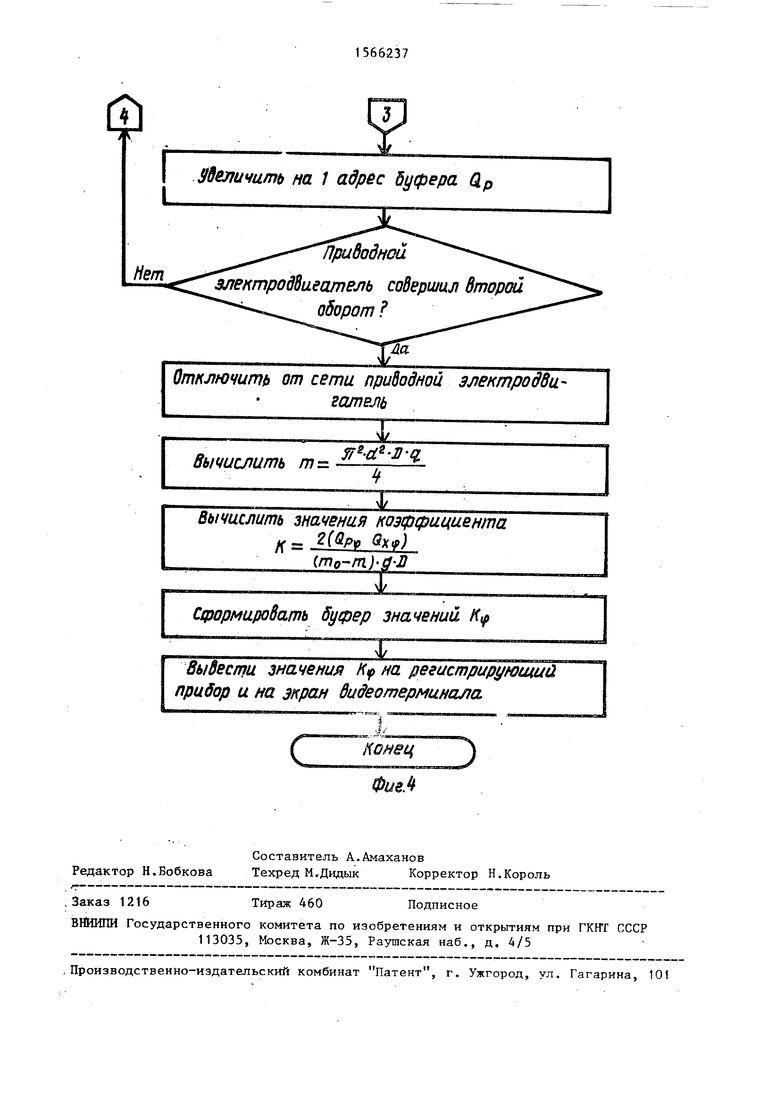
На фиг. 1 показана структурная схема устройства для реализации способа; на фиг. 2 - 4 - алгоритм работы устройства.
Сущность предлагаемого способа градуировки измерителя крутящего момента заключается в том, что к валу измерителя прикладывают образцовый крутящий момент MQ с помощью нагру- зочного узла, включающего шкив заданного диаметра D, к которому на гибкой нити подвешивают груз заданной массы т0, и устанавливают соответствие между величиной выходного сигнала измерителя и величиной образцового крутящего момента, приложенного к нему. При этом перед подвешиванием груза проворачивают вал измерителя на один оборот и одновременно регистри- руют величину выходного сигнала О измерителя в функции угла ц поворота вала, затем подвешивают груз и проворачивают вал измерителя еще на один оборот, регистрируя при этом величи- ну выходного сигйала Q р(, измерителя в функции угла if поворота вала.
Коэффициент Несоответствия межд величиной выходного сигнала измерителя и величиной приложенного крутяще- го момента в заданном угловом положении ротора определяют из соотношения
-(Qp TQxjf). vT(m0-m)gD где га - масса отрезка нити длиной
ffD;
g - ускорение свободного падения. Устройство для реализации предлагаемого способа содержит основание 1, нагрузочный узел 2, имеющий вал 3, подшипники 4, шкив 5, нить 6, поддон 7, набор 8 легкосъемных аттестованных грузов 9 заданной массой М0, платформу Ю и соединительную муфту 11. УстК.
ройство также содержит измеритель 12 крутящего момента, включающий датчик 13 силы, рычаг 14, шаговый приводной двигатель 15 и подшипники 16. Кроме того, в состав устройства входит измерительно-управляющая система 1 /, содержащая микроЭВМ 18, блок 19 управления, регистрирующий прибор 20, системную шину 21 и блок 22 сопряжения .
При этом микроЭВМ 18 имеет процессор 23, блок 24 памяти и видеотерминал 25.
Способ градуировки измерителя крутящего момента осуществляют следующим образом.
Вал приводного двигателя 15 измерителя 12 крутящего момента с помощь муфты 11 сочленяют с валом 3 нагрузочного узла 2. В блоке 24 памяти устанавливают начальный адрес и длину буфера, в котором хранятся значения Затем с пульта видеотерминала 25 вводят численные значения g, d,D, соответствующие удельному весу материала используемой нити 6 подвеса, ее диаметру и диаметру шкива 5. После этого процессор 23 микроЭВМ 18 переводят на выполнение программы запуска блока 19 управления.
Проворачивание вала приводного двигателя 15 на угол Ц осуществляется путем подач 1-го управляющего воздействия через блок 19 управления который работает под управлением процессора 23 микроЭВМ 18.
Приводной двигатель 15 приводит во вращательное движение через муфту 11 вал 3 нагрузочного узла 2.
Суммарная сила сопротивления 0 создает момент сопротивления Мх относительно оси вала приводного двигателя 15, который передается на его статор и посредством рычага 14 с длиной плеча 1 действует на датчик 13 силы. На выходе последнего появляется напряжение, пропорциональное силе сопротивления Qx, которое через аналого-цифровой преобразователь блока
515
22 сопряжения записывается в буфере блока 24 памяти.
Для исключения погрешности, связанной с неравномерностью скорости вращения вала приводного двигателя 15 в течение шага, в пределах одного ша- га-производится п измерений силы, по которым находится среднее значение силы за шаг (фиг. 2). Это значение записывается в буфер блока 24 памяти, в котором по завершении полного оборота вала 3 накапливается массив значений Qxl.- При этом адрес каждого буфера блока запоминающего устройства, в котором хранится текущее значение QX(. соответствует текущему значению угла q. поворота вала приводного двигателя 15.
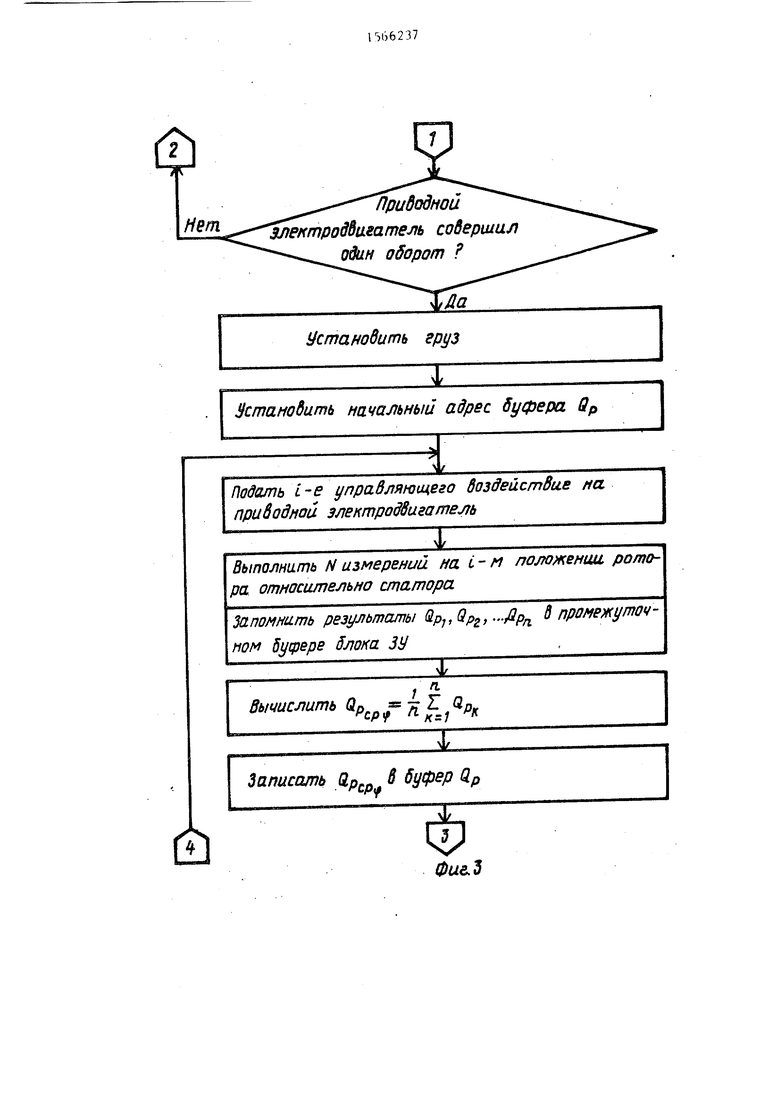
По завершении первого оборота вала 3 поддон 7 поднимается на высоту, равную , и снимает с платформы 1П набор 8 аттестованных грузов 9. При этом на датчик 13 силы начинает действовать сила Ор и напряжение на выходе датчика 13 силы, пропорциональное О , через аналого-цифровой преобразователь блока 22 сопряжения записывается в соответствующем буфере блока 24 памяти.
После завершения второго оборота вала приводного двигателя 15 последний обесточивается, при этом в блоке 24 памяти помимо массива О х( накапливается массив значений О также упорядоченный по номерам шага приводного двигателя 15.
Затем с помощью микроЭВМ 18 вычисляется масса т отрезка нити 6 длиной ffD из выражения /Т2 d D-q
. - 4
4 а затем с помощью микроЭВМ 18 для каж: 376
до г о углового положения вала тмерн- теля 12 крутящего момента вычисляют коэффициент К(. соответствия величиной выходного сигнала измерителя 11 и величиной приложенного крутящего момента из выражения
v -2IQf :9- j/l
т-
VOn.g.iT
10
Формула изобретения
Способ градуировки измерителя крутящего момента, заключающийся в том,
что присоединяют к измерителю нагрузочный узел со шкивом заданного диаметра D, к которому подвешивают на гибкой нити груз заданной массы m и устанавливают соответстне между
величиной выходного сигнала измерителя и величиной действующего на него крутящего момента, отличающийся тем, что, с целью повышения точности, перед подвешиванием
груза проворачивают вал измерителя на один оборот, регистрируют.величину выходного сигнала Ох измерителя и функции угла i/ поворота вала, затем подвешивают груз и вновь проворачивают вал измерителя на один оборот и регистрируют величину выходного сигнала Ору изм ернт.еля в функции угла (/ поворота вала, после чего устанавливают коэффициент К(. соответствия между величиной выходного сигнала измерителя и величиной приложенного крутящего момента в функции угла J поворота вала, опредедялемый по формуле
„ JL(Gfir9-)
, () R V
где m - масса отрезка нити длиной D; g - ускорение свободного падения.
f Начало
Установить начальный адрес буфера Qx
Вести значения q.,ct,D
Включить прибойной (шаговый) Электродвигатель
Подать 1-е управляющее воздействие на приводной электродвигатель
Выполнить N измерений на 1-м положении, ротора относительно статора
Запомнить результаты x,,, ,. в промежуточном буфере блока ЗУ
п
вычислить бдг вдя
Л в/
Записать Q в буфер Q
Увеличить на J адрес д уфера Q
п
1
1 «v
Фиг. 2
Лридодной лектродбигатель содершал один оборот
,Да
Установить груз
XX
Фи&З
Отключить от сети приходной электродвигатель
Вычислить /77 --
Вычислить значения коэффициента
/Г г (т о-т)-а-я
1
Сформировать буфер значений К у
Выбести значения Л /л: регистрирующий прибор и на экран дидеотерминала
С
g -а
1
Конец
J
| Способ определения пускового момента электродвигателя | 1985 |
|
SU1328695A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Успенский В.В | |||
| и др | |||
| Современное состояние и перспективы развития средств измерения крутящего момента | |||
| М., 1974 (Госстандарт СССР | |||
| Сер | |||
| Метрология и измерительная техника, Свердловский филиал ВНИИМ), с.41-4. | |||
